In the realm of aerial robotics and autonomous systems, the precise control and predictable movement of unmanned aerial vehicles (UAVs) are paramount. Whether navigating complex environments, executing intricate aerial maneuvers, or maintaining stable flight in challenging conditions, the underlying mathematical principles governing these actions are crucial. Among these principles, the study of quadratic functions plays a significant role, particularly in understanding parabolic trajectories, optimizing flight paths, and analyzing the dynamics of flight control systems. At the heart of understanding these parabolic paths lies a specific algebraic representation known as the vertex form of a quadratic function.
The vertex form provides a direct and intuitive way to analyze the key characteristics of a parabola, which is a fundamental shape in physics and engineering, including its highest or lowest point, known as the vertex. For drone navigation, understanding the vertex of a parabolic trajectory can be vital for predicting landing points, calculating projectile launch parameters, or optimizing obstacle avoidance maneuvers that might involve a parabolic arc. In essence, the vertex form translates abstract mathematical concepts into actionable insights for designing and controlling sophisticated aerial machines.
This article delves into the vertex form of a quadratic function, exploring its structure, its relationship to the standard form, and its practical implications within the context of drone technology and flight. By demysticating this mathematical concept, we can better appreciate the sophisticated engineering and algorithmic prowess that underpins the reliable and advanced capabilities of modern UAVs.
Understanding the Foundations of Quadratic Functions
Before dissecting the vertex form specifically, it’s beneficial to establish a foundational understanding of quadratic functions and their graphical representation. A quadratic function is a polynomial function of degree two, meaning the highest power of the variable is two. In its most general form, it is expressed as $f(x) = ax^2 + bx + c$, where $a$, $b$, and $c$ are constants, and $a neq 0$.
The Standard Form and its Characteristics
The standard form, $f(x) = ax^2 + bx + c$, is a common way to express a quadratic function. In this form:
- The coefficient ‘a’: Determines the direction and width of the parabola. If $a > 0$, the parabola opens upwards, meaning it has a minimum point. If $a < 0$, the parabola opens downwards, indicating a maximum point. The larger the absolute value of $a$, the narrower the parabola; the smaller the absolute value, the wider it is.
- The coefficient ‘b’: Influences the position of the axis of symmetry and the vertex.
- The constant ‘c’: Represents the y-intercept of the parabola, meaning the point where the graph crosses the y-axis.
Graphically, a quadratic function produces a parabola. This symmetrical U-shaped curve is characterized by its vertex, which is either the lowest point (for parabolas opening upwards) or the highest point (for parabolas opening downwards). The axis of symmetry is a vertical line that passes through the vertex, dividing the parabola into two mirror images.
The Significance of the Vertex
The vertex of a parabola holds significant importance in various applications, especially in fields involving optimization and trajectory analysis. For instance, in projectile motion, the vertex represents the apex of the trajectory – the highest point a projectile reaches before it begins to descend. In drone operations, understanding this apex is critical for tasks like:
- Predicting flight path: Knowing the highest point of a parabolic trajectory helps in anticipating the overall path and potential obstructions.
- Optimizing payload delivery: For tasks involving dropping items, the vertex can be a key point in calculating the precise release timing and angle for accurate delivery.
- Emergency landing strategies: In certain failure scenarios, a drone might need to execute a controlled descent that follows a predictable parabolic arc. Understanding the vertex helps in planning for the safest and most controlled landing.
- Navigation through complex environments: If a drone needs to clear an obstacle with a parabolic maneuver, the vertex defines the peak of that clearance.
While the standard form provides a general representation, it doesn’t immediately reveal the coordinates of the vertex. Extracting this vital information often requires algebraic manipulation. This is where the vertex form offers a distinct advantage.
Unveiling the Vertex Form
The vertex form of a quadratic function is specifically designed to highlight the coordinates of the vertex. It offers a more intuitive understanding of a parabola’s position and orientation on the coordinate plane.
The Structure of the Vertex Form
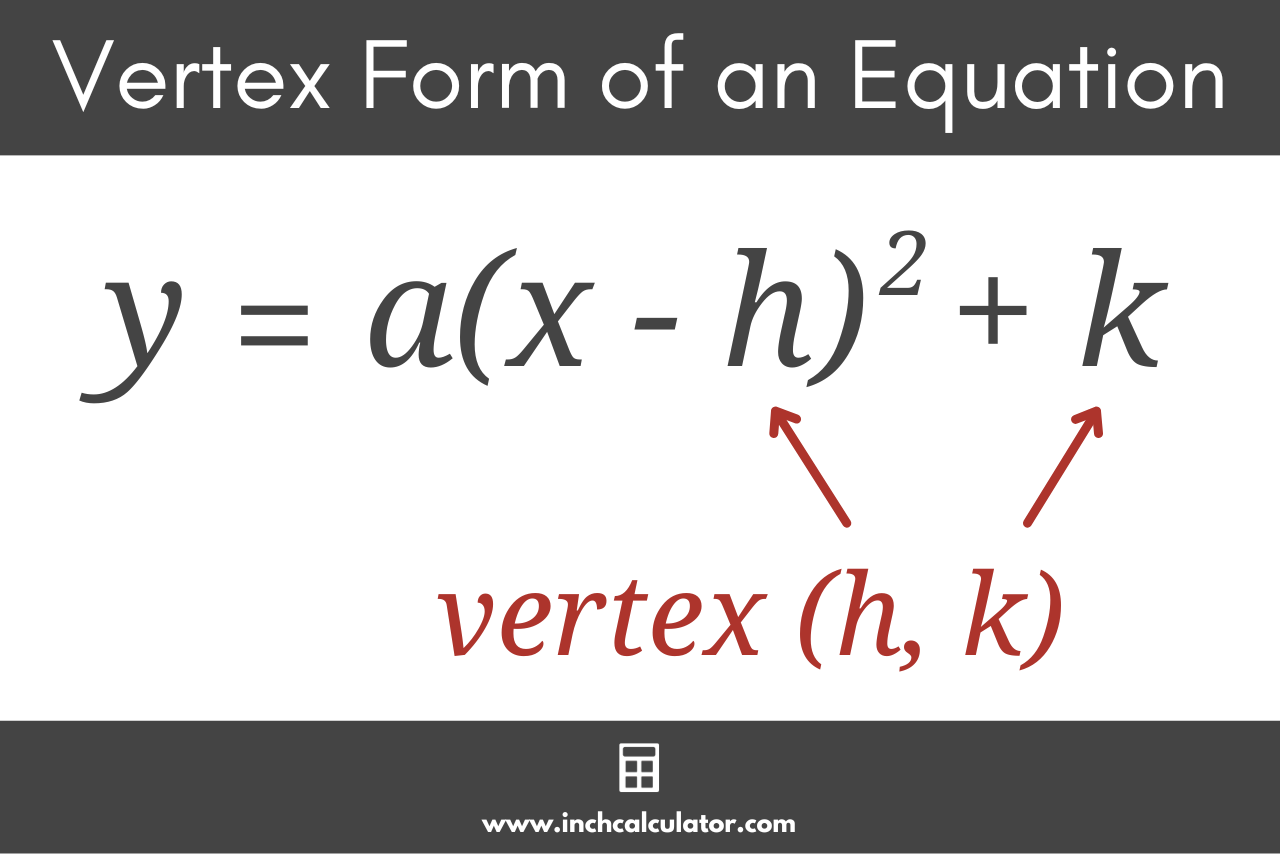
The vertex form of a quadratic function is expressed as:
$f(x) = a(x – h)^2 + k$
In this equation:
- ‘a’: This coefficient is the same ‘a’ as in the standard form ($ax^2 + bx + c$). It dictates the parabola’s direction (upward or downward opening) and its width.
- ‘(h, k)’: These are the coordinates of the vertex of the parabola. The vertex is located at the point $(h, k)$.
The genius of the vertex form lies in its direct revelation of the vertex. Unlike the standard form, where the vertex’s coordinates are implicitly embedded within the coefficients, the vertex form makes them explicit. This immediate access to the vertex is invaluable for quickly analyzing and interpreting parabolic motion or shapes.
How the Vertex Form is Derived
The vertex form can be derived from the standard form through a process called “completing the square.” This algebraic technique transforms the $ax^2 + bx + c$ expression into the $(x – h)^2$ structure.
Let’s consider the standard form $f(x) = ax^2 + bx + c$. To begin the process of completing the square, we first factor out the coefficient ‘a’ from the terms involving $x^2$ and $x$:
$f(x) = a(x^2 + frac{b}{a}x) + c$

Now, we focus on the expression inside the parentheses, $x^2 + frac{b}{a}x$. To “complete the square” for this binomial, we need to add and subtract $(frac{1}{2} times frac{b}{a})^2$, which simplifies to $(frac{b}{2a})^2$:
$f(x) = a(x^2 + frac{b}{a}x + (frac{b}{2a})^2 – (frac{b}{2a})^2) + c$
The first three terms inside the parenthesis now form a perfect square trinomial, which can be factored as $(x + frac{b}{2a})^2$:
$f(x) = a((x + frac{b}{2a})^2 – (frac{b}{2a})^2) + c$
Distribute the ‘a’ back into the parentheses:
$f(x) = a(x + frac{b}{2a})^2 – a(frac{b}{2a})^2 + c$
Simplify the constant terms:
$f(x) = a(x + frac{b}{2a})^2 – frac{ab^2}{4a^2} + c$
$f(x) = a(x + frac{b}{2a})^2 – frac{b^2}{4a} + c$
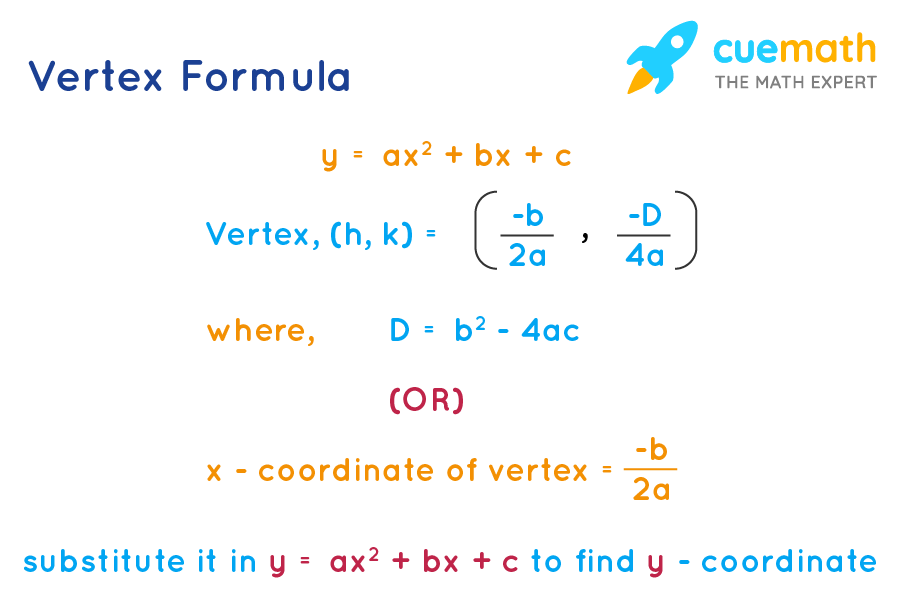
Combine the constant terms to find the value of $k$:
$k = c – frac{b^2}{4a}$
And by comparing $(x + frac{b}{2a})^2$ with $(x – h)^2$, we can identify $h$:
$h = -frac{b}{2a}$
Substituting these values of $h$ and $k$ back into the vertex form $f(x) = a(x – h)^2 + k$, we get:
$f(x) = a(x – (-frac{b}{2a}))^2 + (c – frac{b^2}{4a})$
This derivation demonstrates how the vertex form, with its explicit $h$ and $k$ values, is directly linked to the coefficients of the standard form.
Applications of the Vertex Form in Drone Technology
The vertex form of a quadratic function is not merely an abstract mathematical concept; it has tangible applications in the design, control, and operation of drones. Its ability to directly reveal the peak of a parabolic path or the optimal point in a function makes it a valuable tool for engineers and programmers.
Trajectory Planning and Optimization
When a drone needs to perform maneuvers that follow a parabolic trajectory, such as launching a payload, navigating over an obstacle, or executing a specific aerial stunt, the vertex form is instrumental.
- Predicting Apex and Descent: If a drone is programmed to ascend and descend following a parabolic path, the vertex form $f(x) = a(x – h)^2 + k$ tells us that the highest point (or lowest, depending on ‘a’) of this trajectory occurs at an x-coordinate of $h$. The maximum or minimum altitude reached is $k$. This knowledge is critical for ensuring clearance from the ground or other airborne objects. For example, if a drone is instructed to fly over a building of a certain height, knowing the vertex’s $y$-coordinate $(k)$ helps in calculating the necessary launch angle and speed to ensure adequate clearance.
- Optimizing Flight Paths for Efficiency: In some scenarios, the “vertex” might not represent a physical height but rather an optimal point for a specific parameter. For instance, a quadratic function could model the energy consumption of a drone based on its speed. The vertex of this function would then represent the speed at which energy consumption is minimized, allowing for more efficient flight operations and extended battery life.
- Ballistic Trajectories: For drones that are part of military or research applications requiring the launch of projectiles, understanding the parabolic trajectory of these projectiles is essential. The vertex form allows for precise calculations of the launch angle and initial velocity required to hit a target at a specific distance and altitude, with the vertex defining the highest point of the projectile’s flight.
Sensor Data Analysis and Stabilization
While not always directly representing a physical trajectory, quadratic functions and their vertex form can appear in the analysis of sensor data and the development of stabilization algorithms.
- Error Minimization: Control systems often aim to minimize error signals. If an error function can be approximated by a quadratic, the vertex represents the point of zero error or minimal error. For example, a drone’s stabilization system might use algorithms that try to minimize deviations from a desired attitude. The underlying mathematical models might involve quadratic functions where the vertex signifies perfect stabilization.
- Sensor Calibration: When calibrating sensors, especially those measuring position or velocity, the data might exhibit parabolic characteristics. Analyzing this data using the vertex form can help identify biases or non-linearities, leading to more accurate sensor readings.
- Flight Dynamics Modeling: The complex dynamics of drone flight, including pitch, roll, and yaw, can sometimes be modeled using quadratic equations. The vertex form can then be used to analyze the stability of these systems and determine optimal control parameters that minimize oscillations or maximize response speed.
Advanced Features and Future Developments
As drone technology continues to evolve, the applications of mathematical principles like the vertex form will likely become even more sophisticated.
- Autonomous Navigation in Dynamic Environments: Future autonomous drones will need to navigate increasingly complex and dynamic environments. This will involve predicting the movement of other objects, including other drones or aircraft, which might follow predictable, albeit sometimes complex, paths. Quadratic functions, particularly in their vertex form, can be a building block for these predictive models.
- AI-Driven Flight Path Generation: Artificial intelligence will play a larger role in generating optimal flight paths. When AI needs to find the most efficient or safest route, it might employ optimization techniques that involve minimizing or maximizing functions. If these functions are quadratic or can be approximated as such, the vertex form will be a direct tool for finding these optimal points.
- Human-Drone Interaction: For intuitive control interfaces, understanding the underlying mechanics of flight is crucial. If a user is controlling a drone through a graphical interface that involves parabolic movements, the vertex form can help in translating user input into precise flight commands, ensuring a smooth and predictable user experience.
In conclusion, the vertex form of a quadratic function, while seemingly a basic mathematical concept, provides a powerful and direct lens through which to understand critical aspects of drone technology. From planning precise trajectories and optimizing flight efficiency to refining sensor accuracy and developing sophisticated control systems, its influence is profound and continues to shape the future of aerial robotics. By grasping the simplicity and utility of $f(x) = a(x – h)^2 + k$, we gain a deeper appreciation for the intelligence and precision embedded within the flying machines that are increasingly becoming a part of our world.