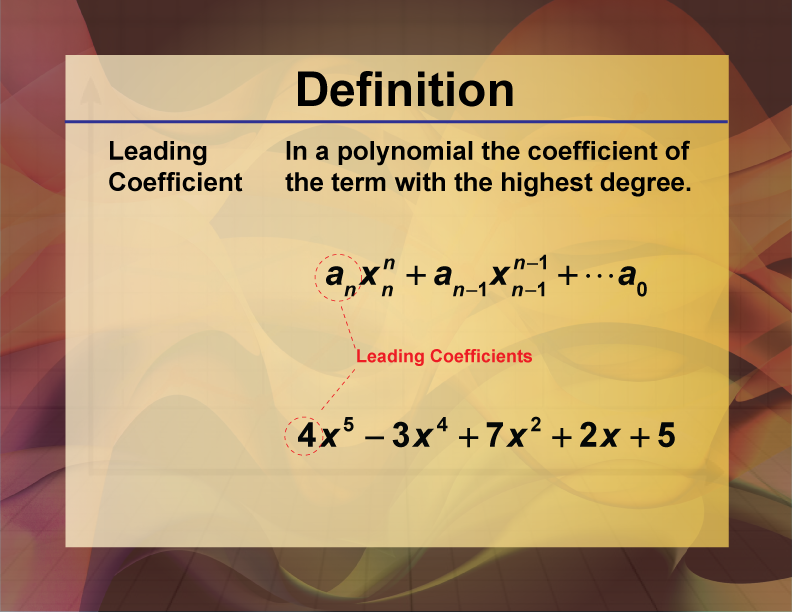
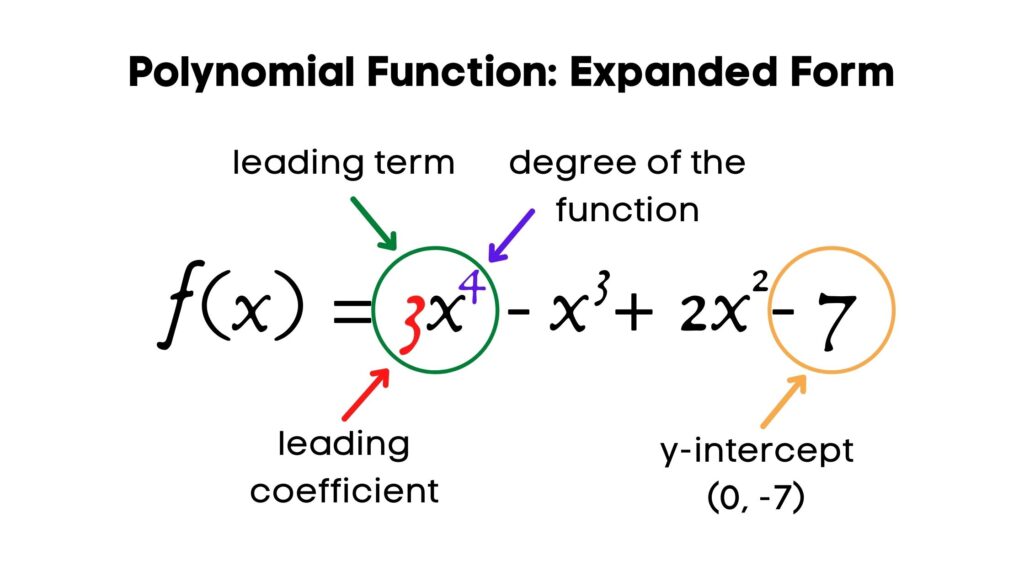
In the rapidly evolving landscape of drone technology, where innovation constantly pushes the boundaries of possibility, the seemingly abstract concept of a “leading coefficient” takes on profound practical significance. Far from a mere mathematical abstraction, within the realm of Tech & Innovation, the “leading coefficient” represents the critical, high-impact parameters or weights embedded within the complex algorithms and mathematical models that dictate a drone’s autonomous capabilities, precision, and intelligent behavior. It signifies the primary drivers, the most influential variables, or the dominant factors in the equations that govern everything from stable flight to sophisticated AI-powered decision-making. Understanding and mastering these leading coefficients is fundamental to unlocking the next generation of drone autonomy, efficiency, and application versatility.
The Algorithmic Architecture of Autonomous Drones
At the heart of every autonomous drone lies a sophisticated web of algorithms, control laws, and dynamic models. These mathematical frameworks are the unseen architects that enable a drone to take off, maintain stability, navigate complex environments, and execute predefined missions without human intervention. The “leading coefficients” in this context are the parameters that exert the most significant influence on the drone’s dynamic response, stability, and trajectory. They are the tuners of performance, defining how quickly, smoothly, or aggressively a drone reacts to commands or environmental disturbances.
Control Theory and Dynamic Models
Autonomous flight is fundamentally a challenge of control. Drones are inherently unstable systems, requiring continuous, rapid adjustments to maintain their desired orientation and position. This is achieved through sophisticated control loops, often based on proportional-integral-derivative (PID) controllers or more advanced model predictive control (MPC) systems. In a simplified dynamic model, a drone’s movement might be described by differential equations where coefficients dictate the influence of various forces and torques. The “leading coefficients” here are often the primary gains (like the proportional gain in PID) that determine the immediate response to an error, or the coefficients of the highest-order terms in more complex system models that define long-term stability and high-speed behavior. For example, in a control system designed to counter wind gusts, the coefficient dictating the rate of motor response to an angular deviation would be a critical leading coefficient, profoundly impacting stability and resistance to external forces. Precise tuning of these coefficients is paramount; an overly aggressive leading coefficient could lead to instability, while one that is too conservative could result in sluggish, unresponsive flight. The challenge lies in identifying these dominant parameters and optimizing them for diverse flight conditions and payloads.
Navigational Precision: Kalman Filters and State Estimation
Beyond simple control, autonomous drones require an accurate understanding of their own state – position, velocity, and orientation – in three-dimensional space. This “state estimation” is often performed using advanced filtering techniques like the Kalman filter or its variants (Extended Kalman Filter, Unscented Kalman Filter). These filters fuse data from multiple sensors (GPS, IMUs, barometers, magnetometers) to provide a statistically optimal estimate of the drone’s state, even in the presence of sensor noise and uncertainty. Within the complex covariance matrices and state transition models of these filters, specific coefficients play a “leading” role in weighting the influence of new sensor measurements versus the predicted state, or in defining the system’s process and measurement noise characteristics. A leading coefficient might dictate the trust placed in GPS readings versus accelerometer data, for instance. Miscalibrating these leading coefficients can lead to drift, inaccurate positioning, or even complete loss of situational awareness, rendering sophisticated obstacle avoidance or precision landing systems ineffective. Therefore, understanding which parameters are most critical to the filter’s performance and how to tune them adaptively is a core challenge in achieving robust autonomous navigation.
AI, Machine Learning, and Predictive Intelligence
The true leap in drone innovation comes with the integration of Artificial Intelligence and Machine Learning. These technologies transform drones from pre-programmed machines into intelligent, adaptive entities capable of learning from their environment, making real-time decisions, and executing tasks with unprecedented levels of autonomy. In the intricate architectures of neural networks and learning algorithms, the “leading coefficients” manifest as the highly influential weights and biases that shape the model’s predictive power and decision-making capabilities.
Object Recognition and Path Planning
AI-powered object recognition allows drones to identify and classify targets, whether for package delivery, search and rescue, or infrastructure inspection. Deep learning models, particularly convolutional neural networks (CNNs), process visual data to detect patterns. Within these networks, millions of “weights” (coefficients) determine the strength of connections between neurons. The “leading coefficients” are those weights that have the most significant impact on the final output – correctly identifying a specific object or feature. These are often the weights associated with filters that detect fundamental shapes, textures, or features early in the network, or those in the final layers that consolidate complex patterns into a definitive classification. Similarly, for autonomous path planning, reinforcement learning agents learn optimal trajectories by interacting with a simulated or real environment. The “leading coefficients” in this context are the learned values or policies that dictate the most critical decisions at each step, ensuring collision avoidance, energy efficiency, and mission completion. Adjusting these leading coefficients, through training and optimization, refines the drone’s ability to perceive, understand, and interact with its surroundings intelligently.
Reinforcement Learning for Adaptive Flight
Reinforcement learning (RL) is a cornerstone for true adaptive autonomy, allowing drones to learn optimal behaviors through trial and error, even in dynamic and unpredictable environments. An RL agent, such as one controlling a drone for complex aerobatics or navigating a cluttered indoor space, learns a policy that maps observed states to optimal actions. This policy is often represented by a neural network, where the “leading coefficients” are the weights that most significantly influence the agent’s decision-making process for critical maneuvers. For instance, in an RL agent learning to land precisely on a moving platform, certain coefficients within its policy network will become dominant, dictating the precise timing and magnitude of thrust adjustments based on relative velocity and distance. These are the leading coefficients that encapsulate the learned wisdom of how to execute the most critical aspects of the task. Fine-tuning these coefficients, through extensive training and robust reward functions, enables drones to adapt to changing wind conditions, carry varying payloads, or perform complex tasks that would be impossible with pre-programmed rules.
Data Science in Remote Sensing and Mapping
Drones have revolutionized data acquisition for remote sensing, mapping, and surveying. Equipped with high-resolution cameras, LiDAR scanners, and multispectral sensors, they collect vast quantities of spatial data. Processing this data to extract meaningful insights relies heavily on sophisticated data science algorithms, where “leading coefficients” represent the key parameters that define the accuracy, integrity, and interpretability of the generated models and analyses.
Photogrammetry and Lidar Processing
Photogrammetry, the science of making measurements from photographs, is a cornerstone of drone mapping. Algorithms stitch together thousands of images to create high-resolution 2D orthomosaics and 3D models. In this process, coefficients within sparse bundle adjustment algorithms play a critical role in estimating camera positions, orientations, and environmental distortions. The “leading coefficients” here are those that correct for the most significant geometric distortions or atmospheric effects, ensuring the fidelity of the reconstructed terrain. Similarly, LiDAR (Light Detection and Ranging) systems generate dense point clouds, which are then processed to create detailed 3D maps. Filtering algorithms remove noise, classify points (ground, vegetation, buildings), and interpolate surfaces. The “leading coefficients” in these filters determine the threshold for noise reduction, the parameters for feature extraction, or the weighting of different point cloud characteristics, all of which directly impact the accuracy and resolution of the final digital elevation models (DEMs) or digital surface models (DSMs). If these leading coefficients are misaligned, the resulting maps can contain significant errors, rendering them useless for precision agriculture, construction monitoring, or environmental assessment.
Environmental Modeling and Anomaly Detection
Drones equipped with multispectral and thermal sensors provide invaluable data for environmental monitoring, agriculture, and infrastructure inspection. Analyzing this data often involves fitting mathematical models to spectral signatures or temperature variations to identify plant health, water stress, or structural anomalies. In these predictive or classification models, the “leading coefficients” are the parameters that correlate most strongly with the target phenomena. For instance, in a model predicting crop yield from multispectral data, a leading coefficient might represent the critical impact of a specific chlorophyll absorption band, indicating plant vigor. For thermal inspection of solar panels or power lines, leading coefficients in anomaly detection algorithms would define the thresholds and patterns indicative of overheating or structural fatigue. These coefficients are often derived from statistical analysis or machine learning training, and their precise identification and validation are crucial for reliable and actionable insights derived from drone-collected data. They enable drones to go beyond simple data collection to deliver genuine analytical intelligence.
The Art and Science of Parameter Optimization
Identifying, understanding, and precisely tuning these “leading coefficients” is not a trivial task; it is both an art and a rigorous science. It involves deep theoretical knowledge, extensive experimentation, and often, the application of advanced optimization techniques. The ongoing quest for better drone performance, enhanced autonomy, and more accurate data hinges on mastering this optimization.
Balancing Performance and Stability
Optimizing leading coefficients often involves striking a delicate balance. For instance, in flight control, increasing a proportional gain (a leading coefficient) might make the drone more responsive, but push it too far, and it becomes unstable, oscillating uncontrollably. Similarly, in an AI model, a leading weight might make it highly sensitive to a specific feature, improving detection in one scenario but causing over-fitting and poor generalization in others. Engineers and data scientists continuously iterate through simulations, flight tests, and data analysis to fine-tune these parameters. Techniques range from classical control tuning methods to advanced machine learning approaches like Bayesian optimization or genetic algorithms, which systematically search for optimal combinations of coefficients across various operational envelopes. The goal is to maximize performance metrics—be it speed, agility, efficiency, or data accuracy—while ensuring robustness, reliability, and safety.

Future Frontiers: Self-Optimizing Systems
Looking ahead, the next frontier in drone technology involves systems that can dynamically identify and adjust their own leading coefficients in real-time. This concept of self-optimizing or adaptive control aims to enable drones to learn and adapt to changing conditions (e.g., varying payloads, wind gusts, sensor degradation) without pre-programming or human intervention. Reinforcement learning, adaptive control theory, and advanced meta-learning algorithms are paving the way for drones that can autonomously tune their own control gains, update their navigation filter weights, or refine their AI model parameters on the fly. This capability will unlock unprecedented levels of resilience, versatility, and autonomy, allowing drones to operate effectively in highly dynamic and unpredictable environments, further cementing their role as indispensable tools across a multitude of industries. The “leading coefficient” of tomorrow will not only be understood but actively managed by the drone itself, pushing the boundaries of what autonomous systems can achieve.