The modern drone landscape, from advanced autonomous systems to sophisticated mapping solutions, relies heavily on robust, flexible, and open-source operating systems. Among these, Ubuntu stands out as a foundational pillar, underpinning a vast array of cutting-edge drone applications and development environments. For anyone involved in the technical aspects of drones – whether designing flight controllers, programming autonomous behaviors, or processing complex aerial data – knowing “what version Ubuntu am I running” is more than a trivial query; it’s a critical piece of information that dictates compatibility, performance, security, and the very capabilities of their aerial innovations. This query, seemingly mundane, unlocks a deeper understanding of the technological stack powering the most advanced aspects of drone innovation.
Ubuntu’s Ubiquitous Role in Drone Ecosystems
Ubuntu’s presence within the drone industry is far-reaching, extending from the ground control stations that orchestrate complex missions to the companion computers on board the drones themselves. Its versatility and robust nature make it an ideal choice for developers pushing the boundaries of what drones can achieve.
From Ground Control to Flight Processing: A Linux Backbone
At the ground segment, Ubuntu frequently serves as the operating system for powerful workstations used in mission planning, telemetry analysis, and post-processing of sensor data. Software like QGroundControl, Mission Planner (often run via Wine or in a virtual machine on Linux), and specialized photogrammetry tools are frequently developed and optimized for Linux environments, with Ubuntu being a primary target distribution due to its widespread adoption and excellent package management. These ground stations are not merely interfaces; they are command centers where complex algorithms for path planning, obstacle avoidance parameter tuning, and data fusion are executed, often relying on the stability and computational efficiency offered by Ubuntu.
On the aerial platform itself, companion computers – small, powerful single-board computers like NVIDIA Jetson series, Raspberry Pi, or Intel NUCs – often run optimized versions of Ubuntu (such as Ubuntu Core or a stripped-down Desktop variant). These companion computers offload complex computational tasks from the primary flight controller. They handle real-time image processing for object detection and tracking, execute AI algorithms for autonomous decision-making, manage communication protocols for data links, and perform sensor fusion for enhanced situational awareness. For instance, a drone programmed for autonomous delivery might use an onboard Ubuntu system to process visual data for precise landing zone identification, while an agricultural drone might use it to analyze multispectral images for crop health assessment in real-time. Without a stable and feature-rich OS like Ubuntu on these companion computers, many of these advanced functionalities would be difficult, if not impossible, to implement effectively.
Furthermore, development kits and simulation environments, crucial for iterating on drone designs and software, also heavily leverage Ubuntu. Robotics Operating System (ROS), a meta-operating system for robots, is almost exclusively developed and deployed on Linux, with Ubuntu being the reference distribution. Simulators like Gazebo, vital for testing autonomous behaviors in a virtual environment before physical deployment, also run seamlessly on Ubuntu, providing a reliable platform for iterative design and validation.
Why Ubuntu for Drones? Stability, Open Source, and Community
The reasons for Ubuntu’s pervasive adoption in drone technology are multi-faceted. Firstly, its stability and reliability are paramount for mission-critical applications. Drones often operate in challenging environments, and an operating system that rarely crashes or encounters unexpected issues is crucial for safe and successful operations. Ubuntu’s long-term support (LTS) releases, in particular, offer extended periods of security updates and maintenance, making them ideal for commercial and industrial drone deployments where consistent operation over several years is required.
Secondly, its open-source nature provides unparalleled flexibility and control. Developers can inspect, modify, and customize every aspect of the operating system to suit specific drone hardware and software requirements. This level of transparency is invaluable for debugging complex issues, optimizing performance for resource-constrained embedded systems, and integrating specialized sensors or custom hardware drivers. The ability to tailor the OS without licensing restrictions fosters innovation and reduces development costs.
Lastly, the immense and active community support surrounding Ubuntu is a significant advantage. A vast ecosystem of developers, forums, and documentation means that solutions to common problems are readily available, and new tools and libraries are constantly being developed. This strong community facilitates knowledge sharing, accelerates problem-solving, and contributes to the rapid evolution of drone technology. Compatibility with key robotics frameworks like ROS and a plethora of programming languages and libraries further solidify Ubuntu’s position as the go-to OS for drone innovation.
Practical Applications: Where Ubuntu Meets Aerial Innovation
The synergy between Ubuntu and advanced drone capabilities is evident across numerous high-impact applications, defining the cutting edge of aerial innovation.
Autonomous Flight and AI Integration
Ubuntu-powered companion computers are at the heart of sophisticated autonomous flight systems. These systems leverage advanced AI algorithms, often developed using frameworks like TensorFlow or PyTorch, which run efficiently on Ubuntu. This enables drones to perform complex tasks such as real-time object detection and classification (e.g., identifying specific vehicles, monitoring wildlife, or inspecting infrastructure for defects), intelligent path planning that adapts to dynamic environments, and even collaborative swarm robotics where multiple drones communicate and coordinate their actions. For instance, a drone performing autonomous surveillance might use its Ubuntu-based companion computer to process live video feeds, detect anomalies using trained AI models, and then adjust its flight path or alert a ground operator, all in real-time. The robust multi-threading and process management capabilities of Linux are crucial for handling the parallel computation required by these AI workloads.
Mapping, Remote Sensing, and Data Processing
In applications like precision agriculture, environmental monitoring, and urban planning, drones capture vast amounts of data using LiDAR, multispectral, hyperspectral, and high-resolution RGB cameras. Ubuntu systems, particularly powerful workstations or cloud instances running Ubuntu, are instrumental in processing this raw data into actionable insights. Photogrammetry software often runs on Ubuntu to stitch thousands of images into detailed 3D models and orthomosaics. Remote sensing applications utilize Ubuntu for analyzing spectral data to assess crop health, detect pollution, or monitor forest fires. The ability to run computationally intensive tasks, manage large datasets, and integrate with specialized scientific software makes Ubuntu an indispensable platform for extracting meaningful information from aerial surveys, transforming raw sensor inputs into critical intelligence.
Robotics Operating System (ROS) and Simulation Environments
The Robotics Operating System (ROS) is a flexible framework for writing robot software, and it has become an unofficial standard in drone research and development. ROS thrives on Ubuntu. It provides a structured environment for managing various drone components as “nodes” – from sensor drivers and navigation algorithms to user interfaces and communication protocols. Developers leverage ROS on Ubuntu to build complex drone behaviors, integrating disparate hardware and software modules seamlessly. Furthermore, simulation environments like Gazebo, which offer realistic physics and sensor models, are predominantly run on Ubuntu. These simulators are critical for testing novel control algorithms, validating autonomous behaviors, and developing new drone applications in a safe, controlled, and cost-effective virtual setting before deploying them to physical hardware. This iterative development cycle, facilitated by Ubuntu and ROS, significantly accelerates the pace of drone innovation.
Identifying Your Ubuntu Version: A Critical Step for Drone Developers & Operators
Understanding the specific version of Ubuntu running on a ground station, companion computer, or development machine is more than just a piece of trivia; it’s a fundamental requirement for ensuring software compatibility, system stability, and security in drone operations. Different Ubuntu versions come with different kernel versions, library dependencies, and software package availability, all of which can impact drone-related applications.
The ‘lsb_release -a’ Command: Your First Line of Inquiry
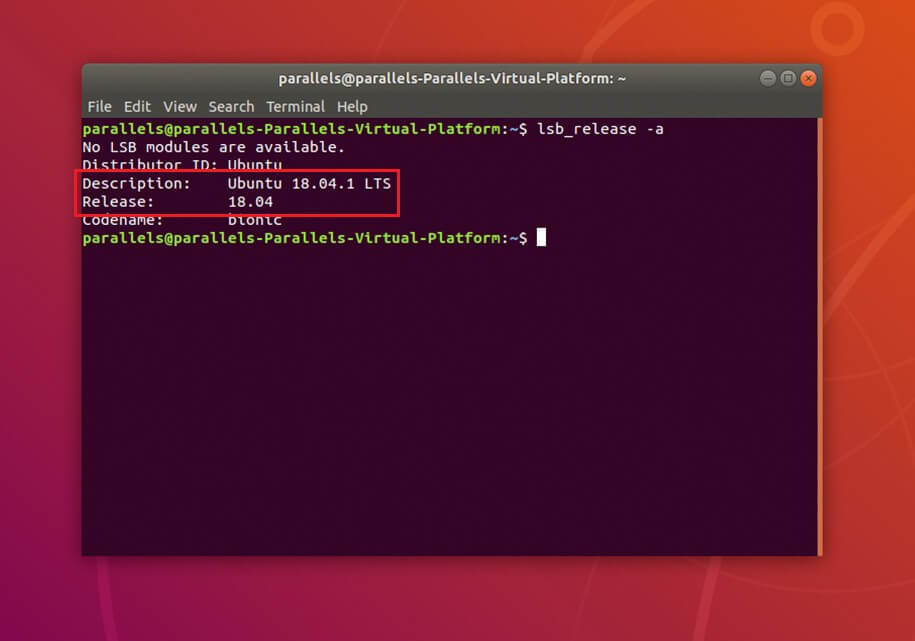
The most straightforward and widely recommended method to identify your Ubuntu version is by using the lsb_release -a command in the terminal. LSB stands for Linux Standard Base, and this utility provides distribution-specific information.
To use it:
- Open your terminal (Ctrl+Alt+T).
- Type
lsb_release -aand press Enter.
The output will typically look like this:
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 20.04.5 LTS
Release: 20.04
Codename: focal
From this output, you can clearly identify the Distributor ID (Ubuntu), Description (which usually includes the point release and whether it’s an LTS version), Release (the main version number, e.g., 20.04), and Codename (a descriptive name, e.g., focal). This information is crucial for verifying software requirements, installing correct drivers, and troubleshooting.
‘cat /etc/os-release’ and ‘hostnamectl’: Alternative Approaches
While lsb_release -a is generally preferred, other commands can also provide similar information, which can be useful if lsb_release is not installed or for cross-referencing.
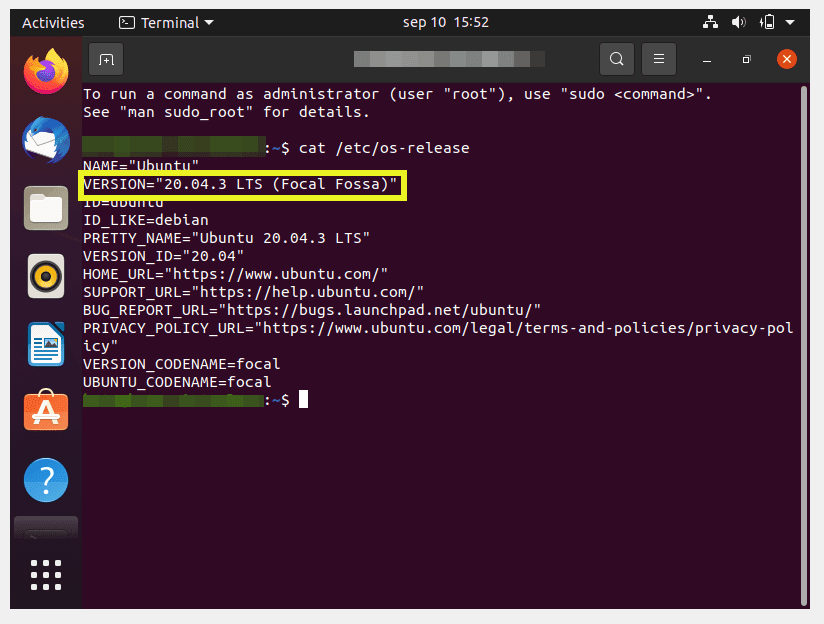
The cat /etc/os-release command will display operating system identification data:
NAME="Ubuntu"
VERSION="20.04.5 LTS (Focal Fossa)"
ID=ubuntu
ID_LIKE=debian
PRETTY_NAME="Ubuntu 20.04.5 LTS"
VERSION_ID="20.04"
HOME_URL="https://www.ubuntu.com/"
SUPPORT_URL="https://help.ubuntu.com/"
BUG_REPORT_URL="https://bugs.launchpad.net/ubuntu/"
PRIVACY_POLICY_URL="https://www.ubuntu.com/legal/terms-and-policies/privacy-policy"
VERSION_CODENAME=focal
UBUNTU_CODENAME=focal
This output is highly detailed and includes the VERSION_ID and VERSION_CODENAME, mirroring the key details from lsb_release -a.
Another utility, hostnamectl, which is part of systemd, can also provide OS information:
Static hostname: drone-dev-workstation
Icon name: computer-laptop
Chassis: laptop
Machine ID: a1b2c3d4e5f6g7h8i9j0k1l2m3n4o5p6
Boot ID: q1r2s3t4u5v6w7x8y9z0a1b2c3d4e5f6
Virtualization: oracle
Operating System: Ubuntu 20.04.5 LTS
Kernel: Linux 5.15.0-79-generic
Architecture: x86-64
While hostnamectl provides a broader overview of the system, including kernel and architecture, the “Operating System” line succinctly confirms the Ubuntu version.
Why Version Matters: Compatibility, Security, and Performance
The specific Ubuntu version directly impacts several critical aspects of drone technology.
Compatibility: Drone software frameworks (like ROS), specific drivers for sensors (e.g., LiDAR, high-resolution cameras), and custom applications often have strict dependencies on particular Ubuntu versions or library versions. Running an incompatible version can lead to compilation errors, runtime failures, or entirely non-functional systems. For instance, a new camera driver might only be packaged for the latest LTS release, or an older version of ROS might not compile on a very new Ubuntu release without significant manual intervention.
Security: Newer Ubuntu releases and point updates regularly include critical security patches. Using an outdated or unmaintained version exposes your drone systems to known vulnerabilities, which could be exploited to compromise flight safety, data integrity, or intellectual property. Given the increasing sophistication of cyber threats, keeping systems updated is paramount.
Performance: While less common than compatibility issues, certain Ubuntu versions might offer kernel optimizations or updated drivers that lead to improved performance for specific drone hardware or computational tasks, especially on resource-constrained embedded systems. Conversely, an older version might not fully leverage the capabilities of newer hardware, leading to suboptimal performance. Thus, identifying the version is the first step towards ensuring your drone’s underlying operating system is optimally configured for its innovative tasks.
Staying Current: Upgrades, Long-Term Support, and the Future of Drone Software
The dynamic nature of drone technology necessitates a proactive approach to system maintenance and version management. Understanding Ubuntu’s release cycle and strategic upgrade paths is crucial for long-term project success and operational integrity.
Understanding LTS Releases and Their Importance
Ubuntu offers two main types of releases: standard releases (released every six months) and Long Term Support (LTS) releases (every two years). For drone developers, researchers, and commercial operators, LTS releases are almost always the preferred choice. They receive five years of free security and maintenance updates for both the desktop and server versions, with extended maintenance available through Ubuntu Pro. This extended support period provides a stable and reliable platform for drone development and deployment without the need for frequent, potentially disruptive, major version upgrades. The stability of an LTS release is particularly vital for industrial drone applications, where consistency, reliability, and minimal downtime are paramount for mission success and safety certifications.
Navigating Upgrades and System Maintenance
While LTS releases offer stability, periodic upgrades to newer point releases (e.g., from 20.04.1 to 20.04.5) or eventually to the next LTS version (e.g., from 20.04 to 22.04) are necessary to leverage new features, critical security patches, and hardware support. However, upgrading a system powering complex drone software requires careful planning. It’s essential to:
- Backup Data: Always back up critical data and configurations before attempting a major upgrade.
- Check Compatibility: Verify that all installed drone software, drivers, and custom scripts are compatible with the target Ubuntu version. This often involves checking documentation for ROS, specific sensor SDKs, and any bespoke applications.
- Test Thoroughly: Conduct comprehensive testing in a development or simulation environment before deploying the upgraded system to production drones or ground stations.
- Gradual Rollout: For fleets, consider a phased rollout of upgrades to minimize risk.
Regular system maintenance, including applying security updates and keeping packages up-to-date, is a continuous process that ensures the integrity and security of the Ubuntu environment, which in turn directly impacts the reliability of drone operations.
The Evolving Landscape: Containerization and Edge Computing
The future of drone software, and thus the role of operating systems like Ubuntu, is also evolving with technologies like containerization and edge computing. Containerization (using tools like Docker or Kubernetes) allows drone applications and their dependencies to be packaged into isolated, portable units. This means that while a base system might run Ubuntu, specific applications can operate within containers that might be built upon different, often minimal, Linux environments. This simplifies deployment, ensures consistency across different hardware, and mitigates some version compatibility challenges.
Edge computing is becoming increasingly prevalent, pushing more processing power and AI capabilities directly onto the drone itself. This typically involves powerful, yet compact, companion computers running Ubuntu variants, executing real-time data processing and AI inference at the “edge” (on the drone) rather than relying solely on cloud processing. This trend demands highly optimized, lightweight, and secure Linux distributions like Ubuntu Core, tailored for embedded systems and IoT devices, ensuring that drones can make faster, more autonomous decisions with greater efficiency. As drones become more intelligent and autonomous, the underlying Ubuntu platform will continue to be instrumental in enabling these advancements, adapting to new architectures and paradigms to maintain its position at the forefront of drone tech and innovation.