The Foundational Concept of Workgroups
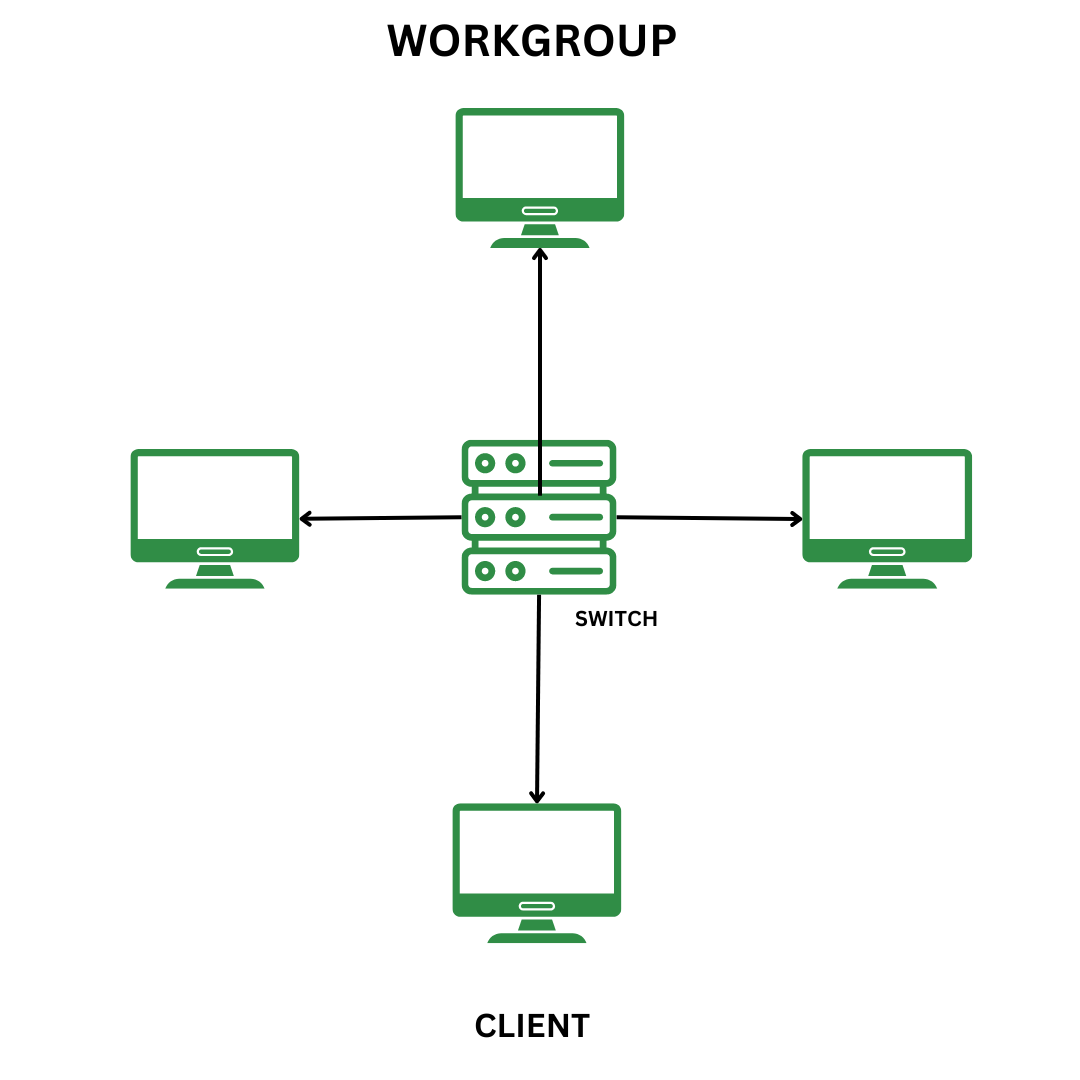
At its core, a workgroup in networking refers to a collection of interconnected computing devices, traditionally computers, that are configured to share resources and communicate with each other without relying on a central server for authentication or management. This peer-to-peer approach allows individual units to pool resources such as files, printers, or computational power, making them accessible to other members of the group. It represents a fundamental organizational model for distributed computing, where the emphasis is on local autonomy and direct interaction between peers. The defining characteristic of a workgroup is its decentralized nature, offering flexibility and ease of setup for smaller-scale environments.
Traditional IT Context
In the conventional realm of information technology, workgroups emerged as a practical solution for small offices or home networks where the overhead of a dedicated server and domain controller was neither necessary nor cost-effective. Each device within the workgroup maintains its own security database, meaning user accounts and permissions are managed individually on each machine. While this simplifies deployment, it also introduces challenges in terms of scalability and centralized control. For instance, managing security policies or user access across dozens of individual machines can become cumbersome. Despite these limitations, the workgroup model has proven incredibly resilient due to its simplicity and effectiveness for focused, collaborative tasks among a limited number of participants. Its principles of direct peer communication and shared resource pools are what make it a compelling concept when applied to more advanced, autonomous systems.
Why Workgroups Matter for Collaboration
The essence of a workgroup lies in its ability to facilitate collaboration. By enabling direct communication and shared access to resources, it creates an environment where multiple entities can contribute to a common objective. In traditional settings, this might involve multiple team members accessing a shared project file or utilizing a network printer. The underlying value is the elimination of bottlenecks and the promotion of efficient resource utilization. For innovation, especially in emerging fields like autonomous systems, the concept of a workgroup provides a blueprint for how independent units can coalesce into a powerful, cooperative force. It highlights the importance of robust peer-to-peer networking, discovery mechanisms, and consistent data exchange to achieve complex outcomes that individual units cannot accomplish alone.
Networking Autonomous Systems: A New Paradigm
The transition from static, human-operated computers to dynamic, autonomous systems, particularly in the domain of drones and UAVs, presents a radical reinterpretation of networking principles. While the foundational concept of a workgroup remains relevant, its application shifts dramatically. Here, “devices” are intelligent, mobile platforms, and “resources” extend beyond files to include sensor data, processing power, flight trajectories, and real-time environmental awareness. The networking challenge is no longer merely about sharing a document; it’s about enabling synchronized movement, collective decision-making, and distributed intelligence in often unpredictable and fast-evolving environments.
From Static PCs to Dynamic Drone Fleets
Unlike conventional workgroups where devices typically remain stationary, drone fleets introduce a critical dimension of mobility. Each drone is an independent, mobile node in the network, constantly changing its position, orientation, and environmental context. This dynamic topology demands highly adaptive and resilient networking solutions. Traditional workgroup discovery protocols, designed for relatively stable local area networks, often fall short in scenarios where nodes are frequently entering and leaving communication range, or where line-of-sight is interrupted. The “workgroup” in this context must dynamically form, reform, and maintain connectivity amidst constant motion, requiring advanced ad-hoc networking capabilities and intelligent routing algorithms to ensure seamless communication and data flow among autonomous aerial units.
The Imperative for Robust Inter-Drone Communication
For drone workgroups to function effectively, inter-drone communication must be exceptionally robust, low-latency, and secure. This is not merely about sharing static data; it’s about real-time exchange of critical flight parameters, sensor readings, task assignments, and coordination signals. A robust communication backbone is essential for collision avoidance, synchronized maneuvers, and distributed decision-making. Failures in this network can have severe consequences, from mission failure to drone loss. Therefore, the “networking” aspect of a drone workgroup goes beyond simple connectivity; it encompasses sophisticated wireless protocols, self-healing network topologies, and intelligent bandwidth management to prioritize critical data in congested or contested airspace. The stability and integrity of this communication are paramount for unlocking the full potential of collaborative drone operations.
Workgroups in Drone Operations: Enhancing Innovation
The workgroup model, adapted for autonomous systems, becomes a cornerstone for innovation in drone technology. By leveraging the principles of decentralized collaboration and shared resources, drone workgroups can achieve unprecedented levels of performance and capability across a range of applications. This shift from individual drone operations to coordinated fleet management is where significant advancements in efficiency, coverage, and complexity of tasks are realized.
Collaborative Mapping and Remote Sensing
One of the most compelling applications of drone workgroups is in collaborative mapping and remote sensing. Instead of a single drone capturing data sequentially over a large area, a workgroup of drones can divide the area into sectors, simultaneously collecting imagery, lidar data, or multispectral readings. This parallel processing drastically reduces mission time and increases efficiency. Furthermore, these drones can share their collected data in real-time, allowing for immediate aggregation and processing. This real-time data sharing within the workgroup enables more accurate and comprehensive map generation, immediate identification of anomalies, and dynamic adjustments to flight paths to capture missed areas or re-scan areas of interest with higher resolution. The workgroup acts as a distributed sensor network, enhancing the overall quality and speed of data acquisition.

Coordinated Autonomous Flight and Swarm Intelligence
The concept of a drone workgroup is intricately linked to coordinated autonomous flight and the burgeoning field of swarm intelligence. Here, the “workgroup” consists of multiple drones acting as a single, coherent entity. This enables complex maneuvers, such as maintaining precise formations, flying through intricate environments, or executing synchronized search patterns that would be impossible for individual drones. Swarm intelligence algorithms facilitate decentralized decision-making, allowing each drone in the workgroup to react to its immediate environment and interact with its peers to achieve a collective goal without central command. This capability is critical for applications like large-scale disaster response, infrastructure inspection, or even entertainment, where intricate aerial displays require perfect synchronization and coordination among numerous units.
AI Follow Mode and Multi-Drone Synchronization
Advancements in AI follow mode further exemplify the power of drone workgroups. While a single drone can follow a target, a workgroup of drones can provide multi-angle perspectives, maintain different distances, or even anticipate the target’s movement by spreading out and creating a predictive field. This multi-drone synchronization, often orchestrated by advanced AI, goes beyond simple following; it involves a dynamic reallocation of tasks within the workgroup, ensuring optimal coverage, persistent tracking, and robust data collection regardless of the target’s actions. The drones within the workgroup communicate their positions, sensor data, and AI-driven predictions to maintain a cohesive and intelligent tracking system, significantly enhancing the capabilities for surveillance, data capture, and dynamic situational awareness.
Architectural Considerations for Drone Workgroups
Designing and implementing effective drone workgroups requires careful consideration of several architectural elements that differ significantly from traditional networking paradigms. The mobility, autonomy, and critical nature of drone operations introduce unique challenges and requirements.
Peer-to-Peer vs. Centralized Command
A fundamental architectural choice for drone workgroups is the balance between peer-to-peer communication and centralized command. While traditional workgroups are inherently peer-to-peer, large-scale drone operations often benefit from some level of centralized coordination, particularly for mission planning, overall strategy, and global resource allocation. However, complete reliance on centralized command introduces single points of failure and can limit responsiveness in dynamic environments. The most innovative drone workgroup architectures employ a hybrid approach: local peer-to-peer networks enable real-time coordination and self-organization among proximate drones for immediate tasks like collision avoidance or local data sharing, while a higher-level, potentially ground-based or airborne, command center provides strategic oversight and larger-scale task assignment. This blend maximizes both resilience and efficiency.
Communication Protocols and Data Exchange
The choice of communication protocols is paramount for drone workgroups. Unlike typical Wi-Fi in office environments, drone networks often operate over longer distances, in diverse terrains, and in the presence of interference. Robust, low-latency, and secure wireless communication protocols are essential. Mesh networking protocols, which allow drones to relay data for each other, are increasingly important for extending range and improving network resilience. Standardized data exchange formats and APIs are also critical to ensure interoperability between different drone types, payloads, and control systems within the workgroup. This enables seamless sharing of telemetry, sensor data, task commands, and mission-critical information, fostering true collaboration rather than mere coexistence.
Security and Resilience in Distributed Drone Networks
Security and resilience are non-negotiable for drone workgroups. The distributed nature of these networks makes them vulnerable to various threats, including signal jamming, data interception, spoofing, and unauthorized access. Encryption, authentication, and secure boot processes are essential for protecting both the drones themselves and the data they transmit. Furthermore, resilience against network failures is crucial. This involves redundant communication links, self-healing network topologies that can automatically re-route data around failed nodes, and intelligent fault detection and recovery mechanisms. A workgroup of drones must be designed to continue functioning, even if some members are lost or compromised, ensuring mission continuity and data integrity under adverse conditions.
Future of Workgroup Networking in UAV Innovation
The evolution of workgroup networking in UAVs is a critical frontier for future innovation. As drone technology becomes more sophisticated, the demands on their collective intelligence and collaborative capabilities will intensify, pushing the boundaries of what workgroups can achieve.
Advanced Task Allocation and Resource Sharing
Future drone workgroups will feature even more advanced mechanisms for dynamic task allocation and resource sharing. Leveraging artificial intelligence and machine learning, these workgroups will be able to autonomously assess their collective capabilities, evaluate mission objectives, and intelligently distribute tasks among members based on factors like payload, battery life, current position, and specialized skills. This dynamic allocation will extend to computational resources, allowing drones to offload processing tasks to more powerful peers or edge computing nodes within the network, optimizing overall efficiency and accelerating decision-making processes. The goal is a truly self-organizing and self-optimizing aerial collective.
Edge Computing Integration for Distributed Intelligence
The integration of edge computing will revolutionize how distributed intelligence operates within drone workgroups. Instead of transmitting all raw data back to a centralized cloud for processing, drones equipped with edge computing capabilities will be able to perform significant data analysis and decision-making locally, right at the point of data acquisition. This reduces latency, conserves bandwidth, and enhances the real-time responsiveness of the workgroup. A workgroup of drones can form a mobile edge computing cluster, collaboratively processing vast amounts of sensor data, performing complex analytics, and deriving actionable insights on the fly, directly supporting applications like real-time environmental monitoring, rapid disaster assessment, and highly localized situational awareness. This distributed intelligence is paramount for creating truly autonomous and adaptive drone workgroups capable of handling unforeseen challenges.