In the dynamic world of drone technology and innovation, where precision, reliability, and data integrity are paramount, understanding fundamental mathematical concepts becomes crucial. One such concept, “variability,” plays a pivotal role in everything from sensor performance and autonomous navigation to sophisticated mapping and AI-driven applications. Variability, in its essence, refers to the extent to which data points in a distribution or dataset diverge from each other and from the central tendency. It quantifies the spread, dispersion, or scattering of data values, providing critical insights into the consistency, reliability, and predictability of systems and measurements within advanced drone operations.

Understanding Variability: Core Concepts
Mathematically, variability is a measure of how spread out a set of numbers is. If data points are close together, variability is low; if they are far apart, variability is high. This concept is fundamental to statistics and has direct implications for the robustness and accuracy of drone technology.
Measures of Dispersion
Several statistical measures quantify variability, each offering a different perspective on data spread:
- Range: The simplest measure, calculated as the difference between the highest and lowest values in a dataset. While easy to understand, it is highly sensitive to outliers and does not provide information about the distribution of intermediate values. For instance, the range of a drone’s altitude readings over a short period might indicate the extreme fluctuations but not the general consistency.
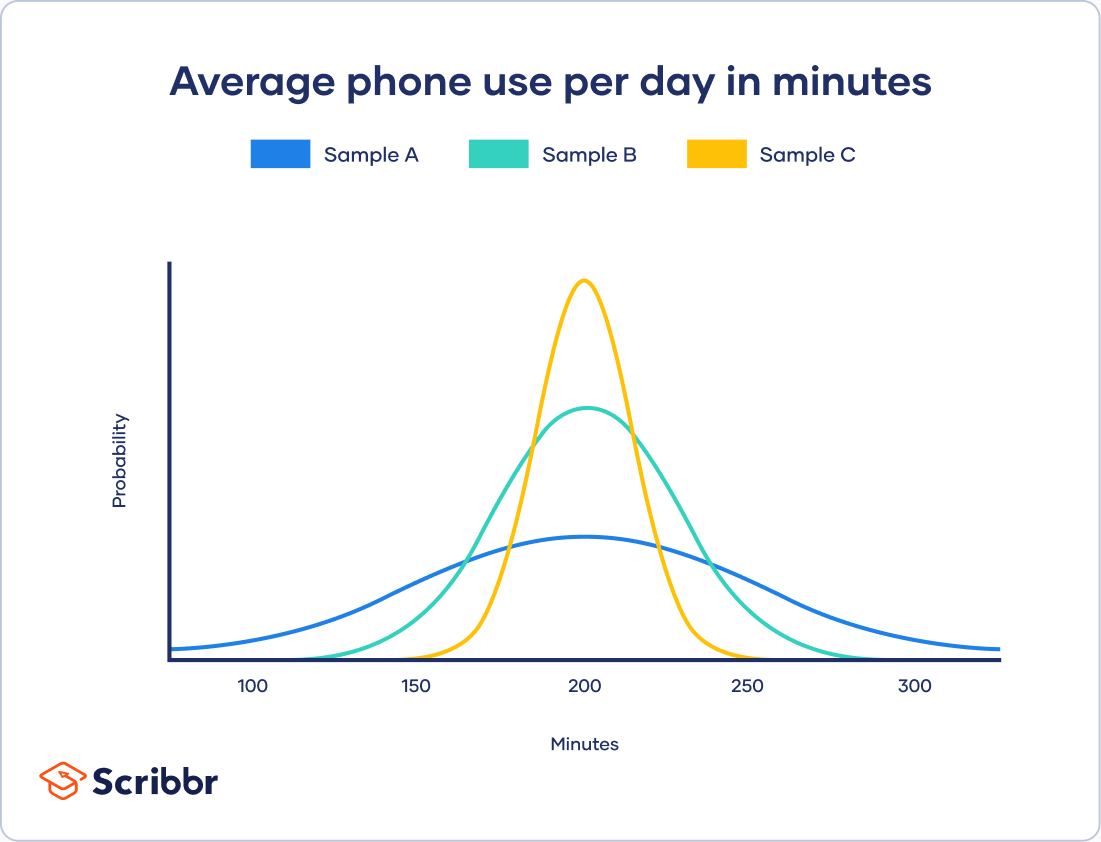
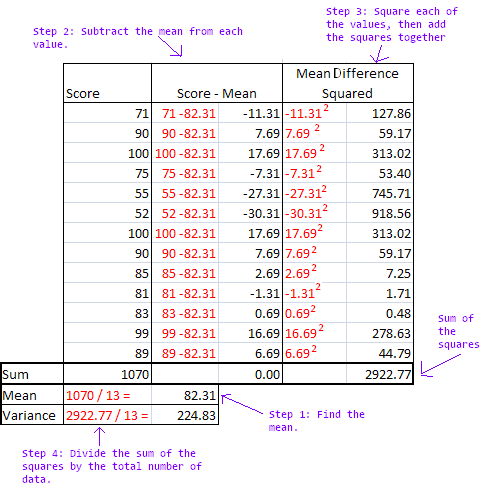
- Variance: A more sophisticated measure, variance quantifies the average of the squared differences from the mean. By squaring the differences, it treats positive and negative deviations equally and penalizes larger deviations more heavily. A high variance indicates that data points are widely spread from the mean, while a low variance suggests they cluster closely around it. In drone flight, the variance of sensor readings over time can reveal the stability of the platform or the consistency of environmental conditions.
- Standard Deviation: The most commonly used measure of variability, the standard deviation is simply the square root of the variance. It is expressed in the same units as the data itself, making it more interpretable than variance. A small standard deviation indicates that data points are tightly clustered around the mean, implying high precision and consistency. Conversely, a large standard deviation suggests significant dispersion. For tech innovators, standard deviation is vital for setting error tolerances, understanding signal-to-noise ratios, and assessing the reliability of data collected by drones.
- Interquartile Range (IQR): This measure describes the range of the middle 50% of the data. It is calculated as the difference between the third quartile (Q3) and the first quartile (Q1). Unlike range, the IQR is less affected by extreme outliers, offering a robust measure of central spread, which can be particularly useful when dealing with noisy drone sensor data that might contain anomalous readings.
Sources of Variability in Data
In drone technology, variability can originate from numerous sources, both inherent and external:
- Sensor Noise: All sensors, regardless of quality, introduce some level of random error or noise into measurements. This inherent variability can affect GPS accuracy, IMU (Inertial Measurement Unit) readings, and camera sensor performance.
- Environmental Factors: Wind gusts, temperature fluctuations, atmospheric pressure changes, electromagnetic interference, and varying light conditions can all introduce variability into drone operations and data collection.
- System Dynamics: The physical properties of the drone itself, such as motor vibrations, propeller imbalances, and aerodynamic instabilities, contribute to variability in flight performance and sensor readings.
- Software and Algorithms: The precision and robustness of control algorithms, data processing techniques, and AI models can influence the level of perceived or managed variability in system output.
- Human Operator Input: For manually piloted or semi-autonomous drones, the variability in human control inputs can also be a significant factor.
Variability in Drone Sensor Data and Navigation
The performance of advanced drone systems heavily relies on the accuracy and consistency of sensor data. Variability in these inputs directly impacts navigational precision, stabilization, and overall operational reliability.
GPS and IMU Data Fluctuations
Global Positioning System (GPS) receivers on drones provide location data, while IMUs (comprising accelerometers, gyroscopes, and magnetometers) offer orientation and motion insights. Both are susceptible to variability. GPS signals can be affected by satellite availability, atmospheric conditions, multipath errors (signals reflecting off surfaces), and GPS jamming/spoofing, leading to spatial variability in reported positions. An analysis of the standard deviation of GPS fixes over time reveals the practical accuracy and precision of the drone’s position. High variability could mean the drone deviates significantly from its intended flight path or struggles with geofencing.
Similarly, IMUs, while providing high-frequency data, are prone to drift and noise. Gyroscope readings might show variability due to temperature changes or subtle vibrations, leading to cumulative errors in orientation estimation over time. Accelerometer data variability can be influenced by motor vibrations or sudden maneuvers. Managing this variability is crucial for stable flight.
Mitigating Variability in Autonomous Flight
Autonomous drones use sophisticated algorithms to fuse data from multiple sensors (GPS, IMU, LiDAR, cameras) to achieve precise navigation and control. A key technique to manage sensor data variability is sensor fusion, often implemented using probabilistic methods like the Kalman Filter or Extended Kalman Filter (EKF). These filters statistically estimate the true state of the drone (position, velocity, attitude) by combining noisy sensor measurements with a predictive model of the drone’s motion.
The Kalman filter inherently deals with variability by modeling the uncertainty (variance) in both the sensor measurements and the system’s prediction. It weights sensor readings based on their estimated uncertainty, giving more credence to more reliable measurements and less to those with higher variability. This statistical approach significantly reduces the impact of individual sensor noise and fluctuations, leading to a much smoother, more accurate, and less variable estimate of the drone’s true state, enabling more reliable autonomous flight paths and obstacle avoidance maneuvers.
Assessing Data Quality in Drone Mapping and Remote Sensing
Drones equipped with advanced imaging systems are transforming mapping and remote sensing. Here, variability directly influences the quality, accuracy, and utility of the collected geospatial data.
Geospatial Accuracy and Precision
When drones are used for photogrammetry or LiDAR mapping, the generated outputs – such as orthomosaics, 3D point clouds, and Digital Elevation Models (DEMs) – are evaluated based on their accuracy and precision. Accuracy refers to how close a measurement is to the true value, while precision refers to the consistency or repeatability of measurements, which is directly related to low variability.
For instance, the variability in the vertical accuracy of a DEM indicates how much the estimated elevation at various points deviates from the true ground elevation. A high standard deviation in vertical error suggests a less reliable elevation model. Similarly, the variability in the geometric alignment of features across an orthomosaic (e.g., how well adjacent images stitch together) points to the overall precision of the mapping process. Statistical analysis of ground control points (GCPs) or independent check points (ICPs) allows mapping professionals to quantify the spatial variability and report the root mean square error (RMSE), a measure directly derived from the variance of errors, to certify map product quality.
Variability in Multi-spectral and Hyperspectral Data
Remote sensing drones often carry multi-spectral or hyperspectral cameras to capture detailed information about vegetation health, water quality, or mineral composition. The data consists of reflectance values across various light wavelengths. Variability in these spectral signatures can be caused by:
- Atmospheric Effects: Changes in atmospheric conditions (haze, water vapor) can alter the recorded spectral values.
- Illumination Differences: Shadows, varying sun angles, or cloud cover introduce variability.
- Sensor Calibration Drift: Over time, sensor response might change.
- Target Heterogeneity: Natural variability in the ground cover itself (e.g., different plant species, soil moisture levels).
Understanding and quantifying this variability is essential for accurate data interpretation. For instance, when monitoring crop health, high variability in a specific vegetation index (like NDVI) within a seemingly uniform field might indicate patchy disease outbreaks or nutrient deficiencies that require targeted intervention. Statistical methods are used to normalize data, reduce noise, and identify significant spectral variations that correspond to real-world phenomena.
The Role of Variability in AI and Machine Learning for Drones
Artificial Intelligence and Machine Learning (AI/ML) are increasingly integral to drone autonomy, data processing, and decision-making. Variability influences the training, performance, and reliability of these intelligent systems.
Training Data Heterogeneity and Model Robustness
AI models for drones, such as those used for object detection (e.g., identifying power lines, search and rescue targets) or autonomous navigation, are trained on vast datasets. The variability within this training data significantly impacts the model’s robustness and generalization capabilities. If the training data lacks variability (e.g., only shows objects under perfect lighting, from a single angle), the model may perform poorly when encountering real-world scenarios with high variability (different lighting, occlusions, varying distances).
Ensuring a high degree of variability in training data – through diverse environments, lighting conditions, object orientations, and sensor noise profiles – is critical for developing AI models that can reliably operate in diverse and unpredictable operational settings. Data augmentation techniques are often employed to artificially increase the variability of training data, thereby improving model resilience.
Predictive Uncertainty in AI-Powered Flight
AI algorithms operating on drones for tasks like autonomous path planning, collision avoidance, or intelligent target tracking do not provide deterministic outcomes; rather, they operate with a degree of predictive uncertainty, which is a form of variability. For example, an object detection model might report a target with an 85% confidence score, indicating inherent variability in its prediction.
Managing this predictive variability is paramount for safe and reliable autonomous flight. Techniques like Bayesian neural networks or Monte Carlo dropout can provide not just a prediction but also an estimate of the uncertainty (variability) associated with that prediction. Drones can then use this uncertainty information to make more conservative decisions – for example, increasing clearance distance around an obstacle if the object detection model shows high uncertainty, or requesting human oversight if the path planning uncertainty exceeds a predefined threshold. This statistical understanding of AI output is vital for developing verifiable and trustworthy autonomous systems.
Managing and Leveraging Variability for Enhanced Drone Performance
Far from being merely a challenge, understanding and managing variability allows tech innovators to design more resilient, intelligent, and efficient drone systems.
Statistical Process Control and Anomaly Detection
By continuously monitoring key performance indicators (KPIs) and sensor data from drones, statistical process control (SPC) techniques can be applied. This involves tracking measures of central tendency and variability (like mean and standard deviation) over time. Control charts, for example, visually represent data points relative to statistically derived upper and lower control limits. Any data point or trend that falls outside these limits signals an “out of control” state or an anomaly, indicating increased variability or a shift in the process.
For drones, SPC can be used to monitor motor efficiency, battery discharge rates, GPS accuracy, or even the consistency of image capture. An increase in the variability of motor temperature readings, for instance, might flag an impending mechanical failure, allowing for proactive maintenance before it becomes a critical issue. Anomaly detection, often leveraging machine learning, directly targets unusual patterns or data points that deviate significantly from expected variability, crucial for identifying malfunctions, security threats, or novel environmental conditions.
Adaptive Systems and Real-time Adjustments
Equipped with a profound understanding of variability, advanced drone systems can be designed to be adaptive. Instead of rigid programming, these drones can adjust their behavior in real-time based on the observed variability in their environment and internal states. For example, if a drone’s IMU data shows high variability due to unexpected turbulence, its flight control system can adapt its stabilization gains to compensate more aggressively. If a mapping mission encounters highly variable lighting conditions, the camera system could dynamically adjust exposure settings and flight speed to maintain consistent image quality.
This adaptive capacity, often powered by AI algorithms that learn from observed variability, represents the pinnacle of innovative drone technology. It allows drones to perform reliably not just in controlled environments but across the full spectrum of real-world variability, pushing the boundaries of what is possible in aerial robotics and autonomous systems.