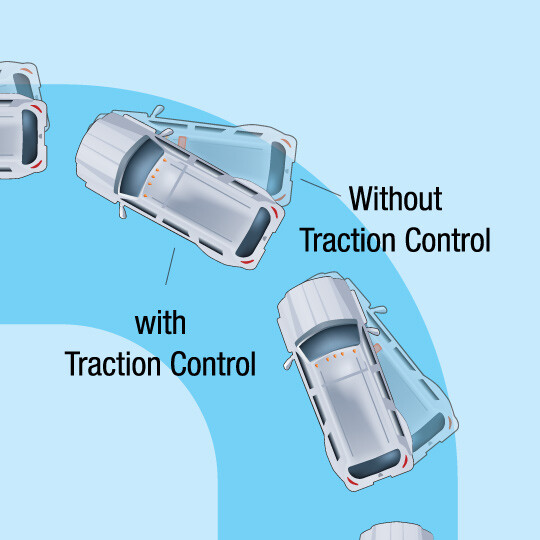
The concept of a Traction Control System (TCS) is fundamentally rooted in automotive engineering, designed to prevent a vehicle’s wheels from losing grip and spinning, particularly during acceleration on slippery surfaces. By intelligently managing engine power output and applying brakes to individual wheels, TCS ensures optimal traction, enhances vehicle stability, and improves safety. While drones do not have wheels that “slip” on a surface, the underlying principles of maintaining stability and control by preventing a loss of “grip” or authority over movement are profoundly relevant to the sophisticated flight stabilization systems crucial for modern Unmanned Aerial Vehicles (UAVs). In the realm of flight technology, understanding the essence of traction control provides a powerful conceptual framework for appreciating how advanced flight controllers and propulsion systems work in concert to achieve unparalleled aerial stability and precision.
In essence, for a drone, “traction” can be interpreted as the effective control and response to commanded inputs, maintained through the precise management of thrust from its propellers and the continuous assessment of its attitude and position in three-dimensional space. Just as a car’s TCS prevents wheels from spinning fruitlessly, a drone’s flight stabilization system prevents the aircraft from “slipping” or losing its commanded orientation and trajectory due to external disturbances like wind, turbulence, or aggressive maneuvers. This article will explore the core principles of traction control and draw compelling analogies to the indispensable stabilization systems that define contemporary flight technology.
The Core Principles of Traction Control and Their Flight Analogy
At its heart, any traction control system, whether on the ground or conceptually in the air, relies on three critical functions: sensing a loss of control, determining the appropriate corrective action, and executing that action swiftly and effectively. For ground vehicles, this means detecting wheel slip and adjusting engine power or braking. For flight technology, it translates into detecting deviations from desired flight parameters and adjusting thrust from multiple motors.
Sensing and Intervention: Detecting “Slip” in Air
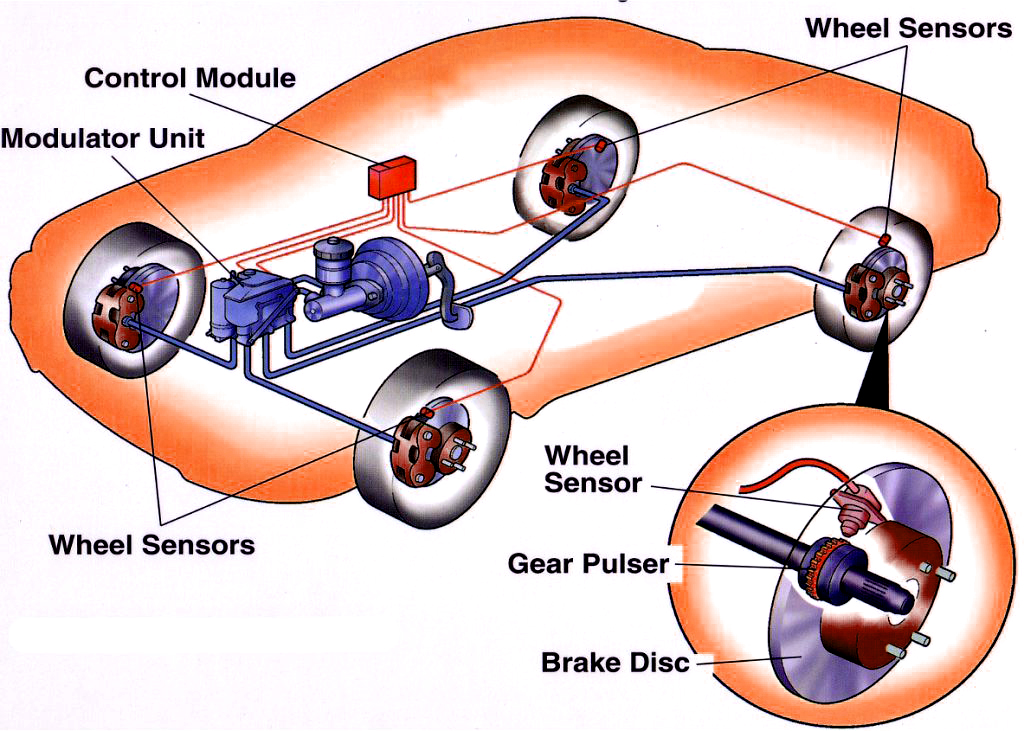
In an automobile, traction control initiates its corrective measures by constantly monitoring wheel speeds. If one wheel begins to spin significantly faster than the others during acceleration, it indicates a loss of grip, or “slip.” This differential speed is the primary signal for the TCS to intervene.
In the context of drone flight technology, the equivalent of “wheel speed sensors” are the Inertial Measurement Units (IMUs). An IMU typically comprises accelerometers, gyroscopes, and sometimes magnetometers.
- Gyroscopes detect rotational rates (pitch, roll, yaw), indicating any unintended angular movement or deviation from the desired attitude. If a drone is suddenly buffeted by a gust of wind, the gyros will detect the rapid angular acceleration, signaling a potential “slip” from its commanded orientation.
- Accelerometers measure linear acceleration, helping the flight controller understand the drone’s movement and detect rapid, uncontrolled shifts in position.
Together, these sensors provide continuous, real-time data on the drone’s orientation, movement, and angular velocity. The flight controller constantly compares this sensed data against the pilot’s commanded inputs and the drone’s expected behavior. Any significant discrepancy or deviation from the intended flight path or attitude is analogous to detecting wheel slip in a car, prompting immediate corrective action from the flight stabilization system.
Managing Propulsion for Stability: Counteracting Aerial “Slip”
Once a ground-based TCS detects wheel slip, it takes precise actions to restore traction. This typically involves two main strategies: reducing engine torque sent to the slipping wheel and/or applying braking force to that specific wheel. Both actions aim to slow the wheel down, allowing it to regain grip on the road surface.
The “propulsion management” aspect of flight stabilization in drones operates on a remarkably similar principle, albeit in a three-dimensional environment. Instead of wheels and a single engine, drones use multiple propellers, each driven by an independent motor. When the IMU detects an undesired pitch, roll, or yaw deviation (our “aerial slip”), the flight controller acts as the central brain.
- Individual Motor Thrust Adjustment: To correct for a roll to the left, for instance, the flight controller might slightly increase the thrust of the motors on the left side and decrease the thrust of the motors on the right side. This differential thrust generates a corrective torque that brings the drone back to its level attitude.
- Preventing Propeller Stall or Overload: Advanced flight control algorithms also monitor motor RPM and current draw, ensuring that individual propellers are operating within their optimal range. Just as automotive TCS prevents the engine from over-revving and losing efficiency due to wheel spin, drone flight controllers prevent motors from stalling or becoming overloaded, which could lead to a loss of control authority or “thrust slip.” This meticulous management of individual motor output is the aerial equivalent of modulating engine power and braking for optimal “grip” in the air.
Dynamic Response to Environmental Challenges
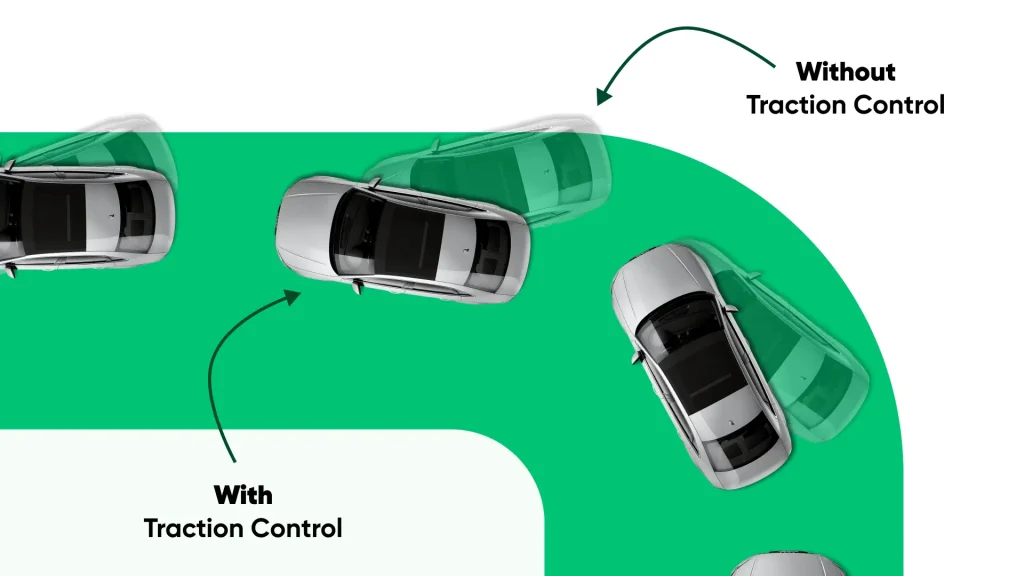
Automotive traction control systems are particularly valuable when driving on varied and unpredictable surfaces—wet roads, icy patches, gravel, or dirt. The system must dynamically adapt its intervention strategies based on real-time surface conditions to maintain optimal traction.
Similarly, advanced drone flight technology must constantly adapt to highly dynamic and often unpredictable aerial environments. Wind gusts, turbulence, changes in air density at different altitudes, and even propeller wash from other drones can all introduce destabilizing forces. A drone’s flight stabilization system, with its continuous sensor feedback and rapid processing, acts as a dynamic “aerial traction control” system.
- Wind Compensation: If a strong crosswind pushes the drone off course, the flight controller detects the lateral drift (via GPS and IMU data) and immediately adjusts the thrust and tilt of the drone to “lean into” the wind, maintaining its desired position and heading. This is analogous to how TCS helps a car maintain its line on a slippery curve.
- Turbulence Mitigation: In turbulent air, the flight controller makes thousands of micro-adjustments per second to motor speeds, absorbing and counteracting the small, rapid perturbations that would otherwise lead to an unstable and erratic flight. This real-time, high-frequency response ensures a smooth and stable flight path, akin to how TCS allows a vehicle to maintain control on an uneven, low-friction surface. This dynamic adaptability is what allows modern drones to operate reliably and safely in a wider range of environmental conditions.
From Ground Grip to Aerial Stability: Flight Stabilization Systems
The journey from automotive traction control to sophisticated flight stabilization systems highlights a fundamental shift in application, yet an enduring reliance on similar control theory principles. These systems are the bedrock of modern flight technology, making complex aerial maneuvers intuitive and autonomous flight a reality.
The Role of Inertial Measurement Units (IMUs)
As discussed, IMUs are the primary sensory input for flight stabilization. They are highly integrated electronic components that combine multiple sensors to measure and report a vehicle’s specific force, angular rate, and sometimes magnetic field surrounding the body, using a combination of accelerometers, gyroscopes, and magnetometers.
- Accelerometers: Detect linear acceleration along three axes, providing information about changes in velocity and direction. They also contribute to determining the drone’s orientation relative to gravity.
- Gyroscopes: Detect angular velocity or rotational motion around three axes (pitch, roll, yaw). These are critical for detecting immediate changes in the drone’s attitude.
- Magnetometers (Electronic Compass): Provide heading information by sensing the Earth’s magnetic field, analogous to a compass, and crucial for navigation and maintaining a stable yaw orientation.
The raw data from these sensors is often noisy and subject to drift. Advanced flight controllers use Kalman filters or complementary filters to fuse this data, providing a highly accurate and stable estimate of the drone’s attitude, velocity, and position in real-time. This precise awareness of the drone’s state is the foundational requirement for any effective stabilization system.
Advanced Flight Controllers and PID Loops
The brain of any drone is its flight controller (FC), which processes the vast amount of sensor data from the IMU and other sources (GPS, barometer, etc.) and translates pilot commands into precise motor control signals. The heart of its stabilization capability lies in sophisticated control algorithms, most commonly the Proportional-Integral-Derivative (PID) loop.
- Proportional (P) Term: This term reacts to the current error—the difference between the desired state (e.g., level flight) and the actual state (e.g., tilted due to wind). A larger error leads to a stronger corrective action. This provides immediate “push-back” against disturbances.
- Integral (I) Term: This term addresses accumulated errors over time. If a constant small error persists (e.g., a slight drift due to a persistent light breeze), the integral term gradually increases the corrective action until the error is eliminated. This helps the drone hold its position or attitude precisely over time.
- Derivative (D) Term: This term anticipates future errors by looking at the rate of change of the current error. If the drone is rapidly tilting, the derivative term applies a counter-force proportional to that rate, effectively “damping” oscillations and preventing overshoot. This provides stability and responsiveness.
Together, the PID loop constantly calculates and applies the necessary adjustments to individual motor speeds, ensuring that the drone maintains its commanded attitude and trajectory with remarkable precision, even in the face of dynamic environmental challenges. This continuous feedback loop is what gives modern drones their characteristic stability and responsiveness, acting as a highly sophisticated “aerial traction control” system.
Thrust Vectoring and Propeller Management
Unlike traditional aircraft that use control surfaces (ailerons, elevators, rudder) to direct airflow for control, multirotor drones achieve control by varying the thrust of individual propellers. This method, often referred to as “thrust vectoring” in a broader sense, allows for extremely rapid and precise adjustments to attitude and movement.
- Individual Motor Control: Each motor on a multirotor drone is independently controlled by an Electronic Speed Controller (ESC), which receives commands from the flight controller. By selectively increasing or decreasing the RPM of specific motors, the flight controller can generate pitch, roll, and yaw moments, as well as control overall lift.
- Maintaining Control Authority: For example, to move forward, the rear motors might slightly increase thrust while the front motors slightly decrease thrust, causing the drone to tilt forward. To correct for an unexpected roll, the flight controller immediately adjusts the thrust differential between the motors on either side of the drone. This precise, individual management of propulsion is directly analogous to how automotive TCS manages power to individual wheels to maintain ground traction. It ensures that the drone always has sufficient “control authority” or “aerial grip” to respond to pilot commands and counteract external forces, even when operating at the edges of its performance envelope.
The Evolution and Future of Aerial “Traction” Control
The evolution of flight stabilization systems continues to push the boundaries of drone capabilities, moving beyond reactive control to predictive intelligence, enhancing safety, and expanding operational frontiers.
Autonomous Flight and Predictive Stabilization
The future of aerial “traction” control lies in increasingly intelligent and autonomous systems. While current PID controllers are highly effective, the integration of Artificial Intelligence (AI) and Machine Learning (ML) is paving the way for predictive stabilization.
- Learning from Environment: AI-powered flight controllers can learn from past flight data and environmental conditions, anticipating turbulent air patterns or sudden wind shifts. Instead of merely reacting to a detected “slip,” the system could predict it based on sensor fusion (e.g., wind sensors, lidar for terrain mapping) and initiate proactive adjustments, preventing instability before it even manifests.
- Adaptive Control: ML algorithms can adapt the control parameters (e.g., tuning the PID gains) in real-time based on changes in payload, battery level, or even damage to propellers, ensuring optimal “aerial traction” under varying operational conditions. This moves beyond static tuning to dynamic, intelligent self-optimization.
Robustness in Extreme Conditions
A significant area of development for flight technology is ensuring robust “aerial traction” control in increasingly challenging and extreme environments.
- High Wind Tolerance: Next-generation stabilization systems are being designed with advanced aerodynamic models and more powerful, responsive propulsion systems to maintain stable flight in significantly higher wind speeds, pushing the operational limits of UAVs.
- Contingency Flight: Imagine a drone losing a motor or having a damaged propeller. An advanced “aerial traction control” system, leveraging AI, could instantly reconfigure its control logic to compensate for the compromised propulsion, maintaining a controlled flight or even enabling a safe emergency landing, effectively regaining “traction” with limited resources.
Enhanced Safety and Performance
Ultimately, the continuous refinement of these flight stabilization systems—our conceptual aerial traction control—translates directly into enhanced safety and superior performance for drones across countless applications.
- Precise Industrial Inspections: Unwavering stability allows drones to capture sharper images and more accurate data for infrastructure inspection, surveying, and mapping, even in complex environments.
- Reliable Delivery Services: Stable and predictable flight paths are critical for safe and efficient drone delivery operations, minimizing risk to both the payload and the public.
- Cinematic Aerials: For professional filmmaking, advanced stabilization enables perfectly smooth, cinematic shots, even during dynamic camera movements or challenging flight paths.
Conclusion
While the term “Traction Control System” traditionally refers to automotive technology, its fundamental principles of sensing a loss of control, intervening intelligently, and managing propulsion to maintain stability are universally applicable to advanced technological systems. In the context of flight technology, these principles are embodied by sophisticated flight stabilization systems that are the unsung heroes of modern drone operation. By continuously monitoring attitude, predicting environmental impacts, and precisely modulating individual motor thrust, these aerial “traction control” systems prevent “slip” in the air, ensuring that UAVs maintain their commanded trajectory and orientation with unparalleled precision. As flight technology continues to evolve, pushing towards greater autonomy and operation in more challenging conditions, the sophistication of these stabilization systems will remain at the forefront, guaranteeing safer, more reliable, and more performant aerial platforms that reshape industries and expand the horizons of what’s possible in the skies.