In the intricate world of automotive engineering, where the relentless pursuit of safety, performance, and efficiency drives innovation, certain technologies stand out as fundamental game-changers. Traction Control is undoubtedly one such innovation. Far from being a mere auxiliary feature, it represents a crucial technological advancement that fundamentally alters how a vehicle interacts with the road, significantly enhancing driver control, safety, and overall dynamic stability. At its core, Traction Control is an active safety system designed to prevent loss of traction of driven road wheels, ensuring that the power delivered by the engine is effectively translated into forward motion rather than wasted in wheel spin.
This sophisticated system acts as a vigilant guardian, constantly monitoring the rotational speed of each wheel. When it detects that a driven wheel is spinning faster than it should – indicative of a loss of grip on the road surface, perhaps due to sudden acceleration, slippery conditions, or aggressive cornering – Traction Control swiftly intervenes. Its primary objective is to restore and maintain the optimal balance between tire grip and engine power, thereby preventing the vehicle from veering off course or losing control. While often working in conjunction with other advanced driver-assistance systems (ADAS) like Anti-lock Braking Systems (ABS) and Electronic Stability Control (ESC), Traction Control plays a distinct and vital role in the intricate dance of modern vehicle dynamics. It embodies a sophisticated blend of sensor technology, rapid computational processing, and precise actuator control, making it a cornerstone of contemporary automotive innovation and a testament to how intelligent systems elevate the driving experience.
The Technological Imperative: Enhancing Vehicle Dynamics
The advent of Traction Control was not merely an enhancement but a technological imperative born from the inherent challenges of vehicle dynamics. As engine power increased and vehicles became capable of higher speeds, the critical interface between tire and road became the limiting factor for control. Preventing wheel spin and optimizing traction became central to both performance and safety, driving engineers to develop intelligent systems capable of managing this delicate balance dynamically.
Overcoming the Physics of Slip
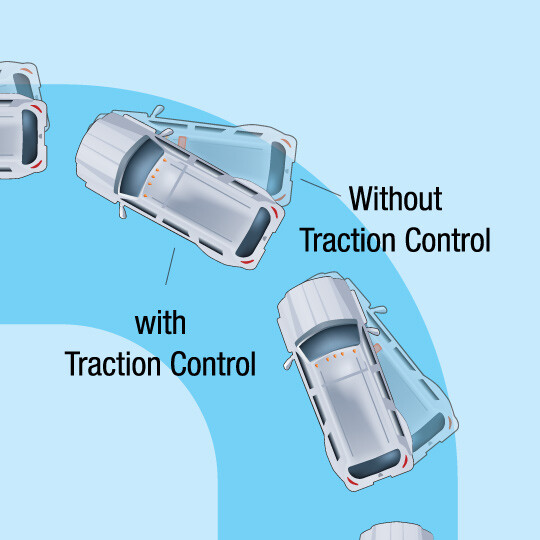
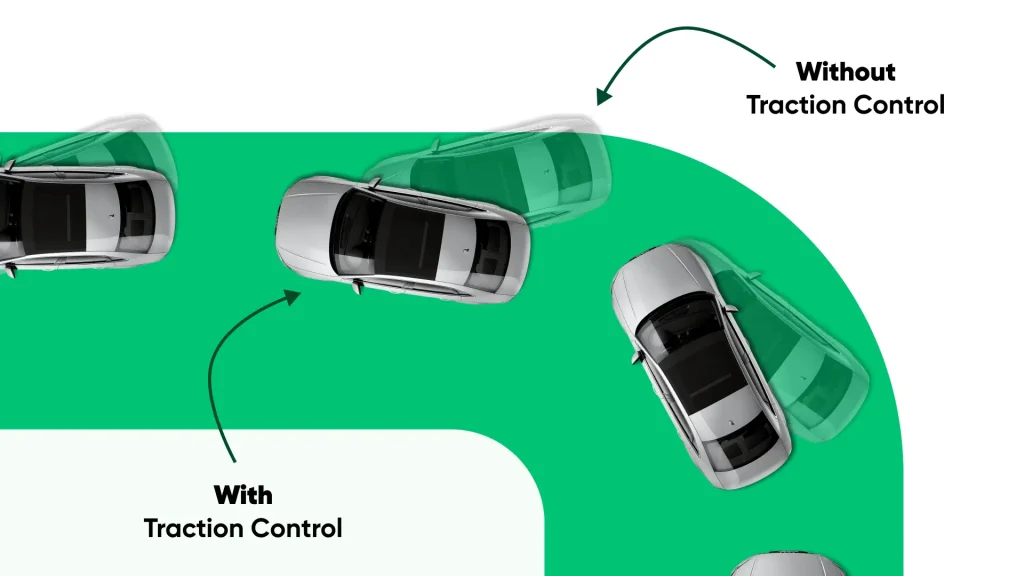
At its heart, Traction Control confronts a fundamental physical challenge: managing friction. When a tire loses traction with the road surface, it enters a state of slip, where the rotational speed of the wheel exceeds the actual speed of the vehicle. This phenomenon, often experienced as wheel spin during acceleration, leads to a significant reduction in directional stability and the ability to transfer power effectively. In severe cases, particularly on low-friction surfaces like ice, snow, or wet roads, uncontrolled wheel spin can cause the vehicle to skid sideways, leading to a complete loss of control.
Traditional driving relied solely on driver skill to modulate throttle input and prevent slip. However, human reaction times and perception limits often fall short in critical situations. Traction Control steps in as an autonomous system, leveraging sophisticated algorithms and high-speed sensors to detect the onset of slip far more rapidly and precisely than a human driver ever could. By proactively mitigating slip, the system ensures that the tires maintain their grip, allowing the vehicle to accelerate more efficiently and safely, irrespective of the road conditions or the driver’s throttle application. This technological intervention fundamentally alters the physics of driving, transforming a potential instability into a controlled and predictable maneuver.
The Digital Brain: Sensors and ECUs
The operational prowess of Traction Control lies in its highly advanced digital architecture, primarily composed of a network of sensors and a powerful Electronic Control Unit (ECU). These components form the “brain” and “nervous system” of the system, enabling real-time monitoring and instantaneous decision-making that is crucial for effective dynamic control.
Each wheel, and sometimes other critical vehicle parameters like steering angle and yaw rate, is equipped with a dedicated sensor. Wheel speed sensors, often utilizing Hall effect or inductive technology, continuously measure the rotational speed of each wheel. These sensors provide vital data to the ECU, acting as its primary input stream. The ECU, a specialized computer tailored for automotive applications, then processes this torrent of data at incredibly high speeds. It compares the rotational speeds of the driven wheels against each other and against the non-driven wheels (or a calculated vehicle speed), looking for discrepancies that indicate slip.
Beyond simple comparison, the ECU employs complex algorithms that consider various factors, including current gear, throttle position, and even ambient conditions reported by other sensors. This “digital brain” is capable of executing millions of calculations per second, allowing it to detect the precise moment when a wheel begins to lose traction. This rapid detection is paramount, as even a fraction of a second’s delay can mean the difference between maintaining control and entering an uncontrollable skid. The intelligence embedded within the ECU, combined with the precision of the sensors, is what elevates Traction Control from a mechanical concept to a truly smart and proactive safety technology.
How Traction Control Works: An Engineering Marvel
The seamless operation of Traction Control is a testament to sophisticated engineering, integrating multiple vehicle subsystems into a cohesive, responsive safety net. It’s a prime example of how modern automotive technology intelligently manages complex physics in real-time.
Real-time Monitoring and Detection
The initial and perhaps most critical phase of Traction Control’s operation is its continuous, real-time monitoring of wheel speeds. This process is orchestrated by the vehicle’s ECU, which serves as the central processing unit for a multitude of sensor inputs. Each wheel is fitted with a wheel speed sensor, identical to those used by the Anti-lock Braking System (ABS). These sensors tirelessly measure the rotational velocity of their respective wheels, transmitting this data back to the ECU hundreds of times per second.
The ECU then acts as a highly advanced comparator. It analyzes the incoming data, looking for discrepancies. Specifically, it compares the speed of the driven wheels against the speed of the non-driven wheels (if applicable) or against an average calculated vehicle speed derived from all wheel speeds. If a driven wheel suddenly accelerates significantly faster than the others, or much faster than the vehicle’s actual forward motion, the ECU identifies this as wheel slip. This detection is incredibly precise and rapid, occurring within milliseconds of the slip beginning. The system is programmed with threshold values; exceeding these thresholds triggers the next phase of intervention. This continuous feedback loop ensures that the system is always ready to react, acting as a vigilant digital co-pilot that constantly assesses the vehicle’s grip on the road.
Intelligent Intervention: Braking and Engine Management
Once wheel slip is detected, the Traction Control system does not hesitate; it initiates immediate and intelligent intervention to restore traction. The beauty of its design lies in its multi-faceted approach, employing two primary methods to curb excessive wheel spin: selective braking and engine power reduction.
The most common and often first line of defense is selective braking. Utilizing the vehicle’s existing ABS hardware, the Traction Control system can apply the brake to the slipping wheel individually. By applying brake pressure to the fast-spinning wheel, its rotational speed is reduced, forcing it to slow down and regain grip with the road surface. This targeted braking action effectively transfers power to the wheels that still have traction (in vehicles with open differentials), or simply reduces the differential speed, thereby stabilizing the vehicle and allowing it to accelerate more effectively. This process is incredibly subtle; drivers might feel a slight vibration or hear a soft whirring sound, but the intervention is rarely jarring.
Concurrently or in tandem, the system can also implement engine power reduction. If braking alone isn’t sufficient or if the slip is severe, the ECU communicates with the engine management system. This communication results in a temporary reduction of engine torque. This can be achieved through various means, such as momentarily retarding ignition timing, cutting fuel to one or more cylinders, or closing the throttle body slightly. By reducing the power output to the drive wheels, the system directly lessens the force attempting to spin the wheels, allowing them to regain traction. This dual-pronged approach ensures that Traction Control can effectively manage wheel slip across a wide range of scenarios, from mild acceleration on a wet road to more aggressive maneuvers on uneven surfaces, always prioritizing stability and control.
The Evolution and Impact of an Automotive Innovation
Traction Control, originally a luxury feature, has transitioned into a standard safety component in most modern vehicles, showcasing a remarkable journey of technological evolution. Its widespread adoption underscores its profound impact on both vehicle safety and overall driving dynamics, transforming the capabilities and expectations of what a car can do.
From Basic Control to Integrated Systems
The journey of Traction Control from its rudimentary beginnings to its current sophisticated state is a compelling narrative of continuous innovation. Early iterations, emerging in the 1980s, were relatively simple, primarily focused on preventing wheel spin during acceleration by cutting engine power. These systems were often reactive and could sometimes feel abrupt to the driver. They were typically standalone units, operating independently with limited integration with other vehicle systems.
However, as automotive electronics advanced, so too did Traction Control. The key turning point was its integration with the Anti-lock Braking System (ABS). By leveraging ABS wheel speed sensors and hydraulic modulators, Traction Control gained the ability to selectively brake individual wheels, a far more refined and effective method of slip mitigation than merely cutting engine power. This synergy laid the groundwork for further integration with Electronic Stability Control (ESC) systems. ESC, a more comprehensive system, not only prevents wheel spin (Traction Control’s primary function) but also actively corrects oversteer and understeer by applying brakes to individual wheels and modulating engine power.
Today, Traction Control is rarely found as a separate system; it is almost universally incorporated as a subset of the broader ESC suite. This integration represents a significant leap, transforming disparate safety features into a cohesive, intelligent network that constantly monitors and adjusts vehicle dynamics across multiple axes. Modern systems are predictive, capable of anticipating slip based on driver inputs and road conditions, and are seamlessly integrated with other ADAS features, offering a holistic approach to vehicle stability and safety.
Safety, Performance, and Driver Confidence
The impact of Traction Control on automotive design and the driving experience is multi-faceted, profoundly enhancing safety, improving performance, and instilling greater confidence in drivers across all skill levels.
From a safety perspective, Traction Control drastically reduces the likelihood of accidents caused by loss of grip. By preventing uncontrolled wheel spin during acceleration, especially in adverse weather conditions like rain, snow, or ice, it helps drivers maintain directional stability and avoid skids. This is particularly crucial in emergency situations where rapid acceleration might be needed to avoid a collision, or when navigating challenging terrains. The system acts as an invisible safety net, intervening precisely when needed to keep the vehicle pointed in the intended direction.
In terms of performance, Traction Control allows vehicles to utilize their engine power more efficiently. By minimizing wheel spin, it ensures that more of the engine’s torque is converted into forward motion, leading to quicker and smoother acceleration, especially from a standstill or out of corners. For high-performance vehicles, where sheer power can easily overwhelm tire grip, Traction Control is indispensable for harnessing that power effectively and safely, optimizing launch control and cornering speeds. It allows drivers to push the limits of their vehicle with greater assurance, knowing that the system is there to prevent uncontrolled slip.
Ultimately, the most significant outcome of Traction Control is the boost in driver confidence. Knowing that a sophisticated system is continuously monitoring traction and ready to intervene provides a sense of security, particularly for less experienced drivers or when facing unpredictable road conditions. This confidence translates into a more relaxed and focused driving experience, reducing stress and fatigue. By democratizing higher levels of control and safety, Traction Control has not only made driving safer but also more accessible and enjoyable for a broader range of individuals.
Beyond Traction Control: Future of Vehicle Stability Tech
Traction Control, while a mature technology, is not a static endpoint. It serves as a foundational component for an even more advanced landscape of vehicle stability systems, paving the way for innovations that will define the future of driving, particularly in the realm of autonomy and sophisticated driver assistance.
Synergies with Advanced Driver-Assistance Systems (ADAS)
The true potential of Traction Control is increasingly realized through its deep integration and synergy with Advanced Driver-Assistance Systems (ADAS). Modern vehicles are equipped with an array of sensors—radar, lidar, ultrasonic, and cameras—that gather comprehensive data about the vehicle’s surroundings and internal dynamics. This wealth of information allows systems like Traction Control to become even more predictive and proactive.
For example, a forward-facing camera coupled with radar can detect slippery road conditions (like standing water or snow patches) far in advance of the wheels actually encountering them. This data can be fed to the Traction Control system, allowing it to pre-emptively adjust its thresholds or prepare for intervention before slip even occurs. Similarly, navigation systems that know the vehicle’s exact position and upcoming road conditions (e.g., sharp turns, steep grades) can inform the stability control suite, enabling it to optimize power delivery and braking strategies for optimal traction and stability. Lane-keeping assist and adaptive cruise control systems also benefit immensely from robust traction management, ensuring that automated maneuvers are executed smoothly and safely, even when grip is compromised. This convergence transforms Traction Control from a reactive safety feature into a proactive, intelligent component of a larger, interconnected safety ecosystem, significantly enhancing the vehicle’s ability to maintain control under diverse and challenging conditions.
Towards Autonomous Vehicle Dynamics
As the automotive industry progresses towards higher levels of autonomous driving, the role of sophisticated vehicle stability systems, with Traction Control at their core, becomes even more paramount. Autonomous vehicles must not only perceive their environment but also execute driving maneuvers with impeccable precision and safety, even in situations where human drivers would struggle with traction.
In an autonomous context, Traction Control is no longer just preventing slip; it’s actively optimizing the vehicle’s grip to ensure the smooth execution of complex algorithms. For instance, an autonomous vehicle performing a lane change on a wet highway needs absolute certainty that its wheels will maintain traction throughout the maneuver. The system will leverage highly detailed sensor fusion data – combining real-time wheel speed, steering angle, yaw rate, throttle input, and external environmental data – to continuously calculate the optimal torque distribution and braking force for each wheel.
Moreover, in fully autonomous vehicles, Traction Control algorithms will likely evolve to incorporate predictive models of tire-road friction based on machine learning and AI. These models could learn from vast datasets of driving conditions and traction events, allowing the vehicle to anticipate and counteract potential slip with even greater accuracy and finesse than current systems. This proactive, intelligent traction management will be critical for ensuring that autonomous vehicles can operate reliably and safely in all weather conditions and on varying road surfaces, forming a crucial pillar in the development of truly resilient and robust self-driving capabilities. The future of vehicle stability lies in seamlessly integrated, AI-powered systems that not only react to but also predict and proactively manage every aspect of a vehicle’s interaction with the road.