Systems theory offers a powerful lens through which to understand the intricate workings of complex phenomena, and its application to the realm of technology, particularly in flight and aerial operations, is profound. At its core, systems theory posits that entities are not merely collections of individual parts, but rather interconnected, interdependent wholes. These wholes, or “systems,” exhibit emergent properties – characteristics that arise from the interactions between their components and cannot be understood by examining the components in isolation. This holistic perspective is crucial for dissecting the sophisticated technologies that underpin modern flight, from the basic principles of lift and propulsion to the advanced algorithms that govern navigation, stabilization, and decision-making in autonomous aerial vehicles.
Understanding systems theory allows us to move beyond a superficial appreciation of individual components, such as a GPS module or a gyroscope, and delve into how these elements collaborate to achieve a unified objective. In the context of flight technology, this means recognizing that a drone’s ability to maintain stable flight isn’t solely due to a powerful motor or a precise accelerometer. Instead, it’s the result of a dynamic interplay between hardware sensors, sophisticated control algorithms, actuators, and the very environment in which the flight occurs. Disruptions or improvements in one part of this system invariably ripple through the entire structure, impacting its overall performance and reliability. This interconnectedness is the defining characteristic of any system, and grasping this fundamental concept is the first step to appreciating the complexity and elegance of flight technology.
The Foundational Principles of Systems Theory
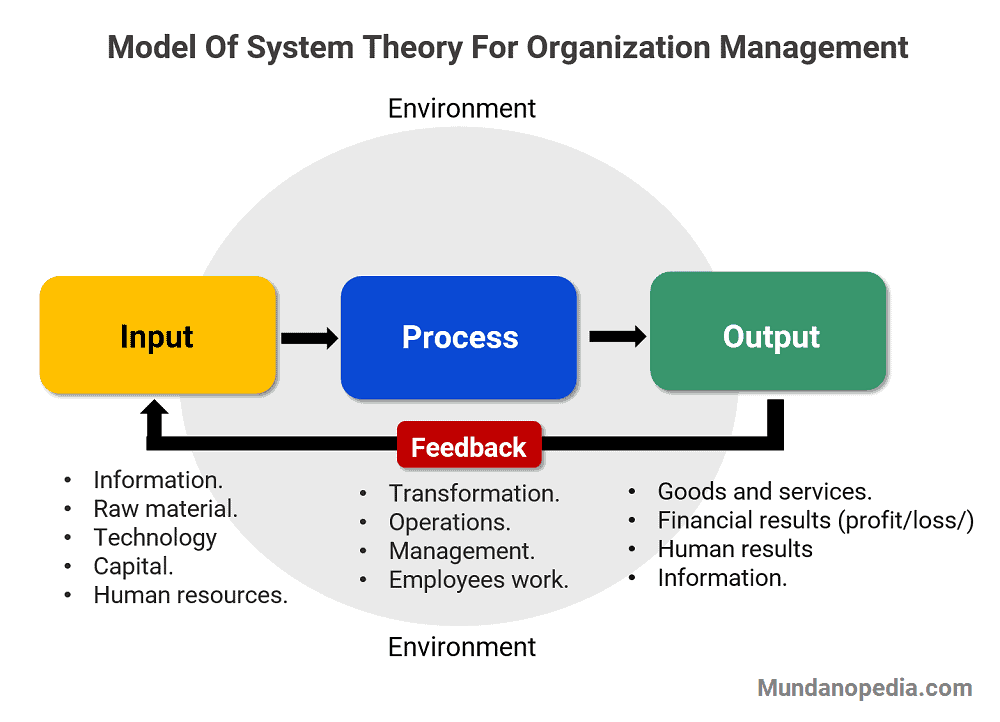
At its heart, systems theory is concerned with understanding how different elements interact to form a cohesive whole. This framework provides a structured approach to analyzing complex phenomena by focusing on relationships, feedback loops, and emergent behaviors. For flight technology, this means shifting from a component-centric view to a holistic perspective that acknowledges the interdependence of all operational elements.
Interconnectedness and Interdependence
The most fundamental principle of systems theory is that a system is more than the sum of its parts. In flight technology, this translates to recognizing that a drone’s ability to fly and perform its tasks is not a direct result of each individual component’s capability, but rather how these components interact and influence each other.
- Hardware Integration: Sensors like accelerometers, gyroscopes, magnetometers, and barometers are not independent entities. They continuously feed data into the flight controller, a central processing unit that interprets this information and issues commands to the motors. The accuracy and responsiveness of this data flow are paramount. A slight drift in a gyroscope reading, for instance, needs to be compensated for by other sensors and the control algorithm in real-time to maintain stability.
- Software Algorithms: The flight control software is the brain of the system. It processes sensor data, applies complex mathematical models, and generates control signals. The algorithms themselves are designed to manage the inherent complexities of flight, such as atmospheric disturbances and the inertia of the aircraft. They are constantly adjusting to maintain the desired altitude, heading, and velocity.
- Environmental Factors: The system also extends to the external environment. Wind speed and direction, air density, and even electromagnetic interference can significantly impact flight performance. Advanced flight systems are designed to sense and adapt to these external factors, demonstrating the system’s responsiveness to its surroundings.
Feedback Loops
Feedback loops are the dynamic mechanisms that allow systems to regulate themselves and adapt to changing conditions. In flight technology, these are absolutely critical for maintaining stability and achieving desired flight paths.
- Negative Feedback: This is the most common type of feedback in stable systems. It works to counteract deviations from a desired state. For example, if a drone begins to tilt to the left due to a gust of wind, the sensors detect this deviation. The flight controller processes this information and signals the motors on the right side to increase their speed, while those on the left decrease theirs. This counteraction brings the drone back to its intended level flight, effectively negating the disturbance.
- Positive Feedback: While less common in stable flight control, positive feedback can exist in certain operational modes, such as during a rapid ascent where the system amplifies the initial command to achieve the desired altitude quickly. However, unchecked positive feedback can lead to instability.
- Control Loops: Modern flight controllers operate on intricate closed-loop systems. Sensor data represents the “output” of the physical state, which is fed back to the “input” (the desired state or command). The controller constantly compares these and generates corrective actions to minimize the error. This continuous cycle is what enables precise hovering, smooth maneuvers, and the execution of complex flight plans.
Emergent Properties
Emergent properties are novel characteristics that arise from the interactions of system components but are not inherent to any single component. In flight technology, these properties are what elevate a collection of parts into a functional and intelligent aerial platform.
- Stability: A drone’s ability to remain stable in the air, even under adverse conditions, is an emergent property. No single sensor or motor can achieve this; it emerges from the synergistic interaction of all components and control algorithms.
- Autonomous Navigation: The capacity for a drone to navigate a complex environment, avoid obstacles, and reach a designated waypoint without direct human input is another emergent property. This arises from the integration of GPS, vision sensors, IMUs, and sophisticated AI algorithms working in concert.
- Intelligent Flight Modes: Features like “Follow Me” or “Point of Interest” modes are emergent properties. They are not programmed into individual sensors but are the result of the system’s ability to process multiple data streams (camera, GPS, motion sensors) and execute complex behaviors based on that integrated information.
Systems Theory Applied to Flight Control Architecture
The architecture of flight control systems perfectly exemplifies the principles of systems theory. It’s a layered, interconnected design where each subsystem plays a vital role in the overall performance and safety of the aerial vehicle. This hierarchical structure, built upon the foundations of systems theory, enables sophisticated flight capabilities.
Sensor Subsystem
The sensor subsystem is the primary interface of the flight system with the physical world. It gathers raw data about the drone’s state and its environment. The redundancy and diversity of sensors are crucial for accurate state estimation and robust operation.
- Inertial Measurement Units (IMUs): Comprising accelerometers and gyroscopes, IMUs provide crucial data on linear acceleration and angular velocity. Accelerometers measure the rate of change of velocity, while gyroscopes measure the rate of rotation around each axis.
- Barometric Pressure Sensors: These sensors measure atmospheric pressure to provide an estimate of altitude, particularly useful for maintaining consistent height.
- Global Navigation Satellite Systems (GNSS): Primarily GPS, GLONASS, Galileo, and BeiDou, these systems provide absolute positioning data, enabling navigation and waypoint following.
- Magnetometers: These sensors provide directional information relative to the Earth’s magnetic field, assisting in heading determination.
- Vision Sensors (Cameras): Beyond their imaging capabilities, cameras are integral to systems for optical flow, obstacle detection, and visual odometry, providing relative motion and depth information.
- Lidar and Radar: Used in more advanced systems for precise distance measurement and obstacle mapping, enhancing situational awareness.
Flight Controller Subsystem
The flight controller is the central processing unit, the “brain” of the flight system. It takes input from all sensors, processes it through complex algorithms, and generates output signals to control the actuators.
- State Estimation: This involves fusing data from multiple sensors (e.g., IMU, GPS, barometer) to produce a highly accurate and reliable estimate of the drone’s current position, velocity, attitude, and altitude. Algorithms like Kalman filters are commonly employed here.
- Attitude Control: This is the core function, maintaining the drone’s orientation (pitch, roll, yaw) to counteract external disturbances and respond to pilot commands. PID (Proportional-Integral-Derivative) controllers are a fundamental component of most attitude control systems.
- Navigation and Path Planning: For autonomous flight, this subsystem interprets navigation commands (e.g., destination waypoints) and plans a safe and efficient flight path, incorporating obstacle avoidance strategies.
- Sensor Fusion Algorithms: The sophisticated integration of data from diverse sensors is a hallmark of modern flight controllers. This fusion ensures that the system can operate reliably even if one sensor fails or provides inaccurate readings.
Actuator Subsystem
The actuator subsystem translates the commands from the flight controller into physical actions that control the drone’s movement.
- Brushless DC Motors (BLDCs): These are the primary propulsion units in most multirotor drones. Their speed is precisely controlled by the flight controller through Electronic Speed Controllers (ESCs).
- Electronic Speed Controllers (ESCs): ESCs receive signals from the flight controller and modulate the power supplied to the BLDCs, thereby controlling their rotational speed and, consequently, the thrust generated.
- Propellers: While seemingly simple, propeller design and pitch significantly influence the efficiency and responsiveness of the propulsion system.
Communication and Power Subsystem
These subsystems, while not directly involved in the physics of flight control, are essential for the overall functioning of the aerial system.
- Radio Control (RC) Receiver: Receives commands from the pilot’s transmitter.
- Telemetry Transmitter: Sends data back to the ground station (e.g., battery voltage, GPS coordinates, flight status).
- Battery Management System (BMS): Monitors and manages the power supplied by the battery, ensuring safe and efficient operation.
- Power Distribution Board (PDB): Distributes power from the battery to all onboard components.
The Dynamic Nature of Flight Systems: Adaptation and Evolution
Systems theory emphasizes that systems are not static but are dynamic entities that adapt and evolve. Flight technology, particularly in the context of drones and UAVs, is a prime example of this dynamism, driven by continuous innovation and the need to respond to increasingly complex operational requirements.
Adaptation to Environmental Disturbances
Flight systems are designed to be highly adaptive. The continuous stream of sensor data and the rapid processing by the flight controller allow for near-instantaneous adjustments to external forces.
- Wind Compensation: As mentioned, negative feedback loops are crucial for compensating for wind. Advanced algorithms can even predict and actively counter gusts based on subtle changes in sensor readings before they significantly impact the drone’s trajectory.
- Atmospheric Pressure Changes: While barometers provide altitude data, flight controllers must also account for changes in air density, which affect motor performance and aerodynamic forces.
Learning and Optimization
Modern flight systems are increasingly incorporating elements of machine learning and artificial intelligence, pushing the boundaries of adaptive capabilities.
- AI-Powered Flight Control: Beyond traditional PID controllers, some systems are experimenting with neural networks to learn optimal control strategies for specific flight conditions or aircraft configurations. This can lead to smoother flight, improved efficiency, and enhanced maneuverability.
- Predictive Maintenance: By analyzing performance data over time, systems can identify anomalies that might indicate an impending component failure, allowing for proactive maintenance and preventing catastrophic events.
- Adaptive Navigation: As drones are tasked with more complex missions, their navigation systems are becoming more adaptive. This includes dynamic route recalculation based on real-time environmental data, avoiding newly identified obstacles, or optimizing flight paths for energy efficiency.

System Evolution and Upgradability
The modular design inherent in many flight systems, a direct consequence of understanding them as interconnected subsystems, allows for evolution and improvement over time.
- Software Updates: New algorithms for flight control, navigation, or obstacle avoidance can be deployed through software updates, significantly enhancing the capabilities of existing hardware. This demonstrates how the “software” subsystem can evolve and improve the performance of the “hardware” subsystem.
- Hardware Upgrades: As new sensors or more powerful processing units become available, they can often be integrated into existing platforms, further advancing the system’s capabilities. This modularity is a direct benefit of viewing the drone as a system of interconnected components rather than a monolithic entity.
- Emerging Applications: The continuous evolution of flight systems is driven by new applications in fields like aerial photography, inspection, delivery, and surveillance. Each new application demands further refinement and adaptation of the underlying systems, pushing the boundaries of what is technically feasible.
In conclusion, systems theory provides the essential framework for understanding the sophisticated interplay of components that constitute modern flight technology. By appreciating the interconnectedness, feedback mechanisms, and emergent properties of these complex systems, we gain a deeper insight into their design, operation, and the relentless pace of innovation in the aerial domain.