In the rapidly evolving landscape of unmanned aerial vehicles (UAVs), the difference between a successful mission and a catastrophic hardware loss often boils down to the precision of flight systems. When a drone behaves erratically—whether it drifts unexpectedly, loses its GPS lock, or suffers a complete power failure—the immediate reaction is to fix the damage. However, for engineers, professional pilots, and developers, the “how” of the failure is less important than the “why.” This is where RCA, or Root Cause Analysis, becomes the most critical tool in the flight technology arsenal.
Root Cause Analysis is a systematic process used to identify the underlying source of a technical malfunction or system failure. In flight technology, RCA is not merely a troubleshooting step; it is a rigorous investigative framework designed to ensure that a localized glitch does not reflect a systemic vulnerability in navigation, stabilization, or sensor integration. By shifting the focus from the symptoms to the source, RCA allows for the iterative improvement of flight safety and the advancement of autonomous reliability.
The Fundamental Framework of RCA in Flight Systems
At its core, RCA is about moving beyond the superficial. If a drone crashes because a motor stopped spinning, the superficial cause is “motor failure.” However, an RCA investigation might reveal that the motor stopped because the Electronic Speed Controller (ESC) overheated due to a firmware bug in the power distribution logic. By addressing the firmware, you prevent every other drone in the fleet from suffering the same fate.
The Role of Telemetry and Flight Data Logs
The backbone of any RCA in drone technology is flight data. Modern flight controllers, such as those based on the Pixhawk or proprietary DJI ecosystems, record hundreds of variables per second. This data—collectively referred to as the “Black Box”—includes gyro rates, accelerometer values, magnetometer headings, GPS coordinates, and battery voltage fluctuations.
When performing an RCA, a flight engineer will analyze these logs to recreate the flight’s final moments in a digital environment. By comparing the “desired” attitude (what the flight controller wanted to do) against the “actual” attitude (what the drone actually did), investigators can pinpoint the exact millisecond the system deviated from its programmed path. This high-fidelity data is the only way to differentiate between environmental factors, such as wind shear, and internal technological failures.
Moving Beyond Surface-Level Symptoms
A common pitfall in flight technology maintenance is “symptom-swapping.” If a drone experiences a “toilet bowl effect” (spiraling in circles while trying to hover), an amateur might simply replace the GPS module. However, an RCA approach would investigate whether electromagnetic interference from unshielded internal wiring is corrupting the magnetometer’s data.
In this scenario, the GPS module is functioning perfectly; it is simply receiving bad data. Replacing the module would not solve the problem. RCA forces the technician to look at the system as a holistic network of sensors and processors, ensuring that the actual source of the instability—the lack of shielding—is identified and rectified.
Defining the Core Objectives of RCA
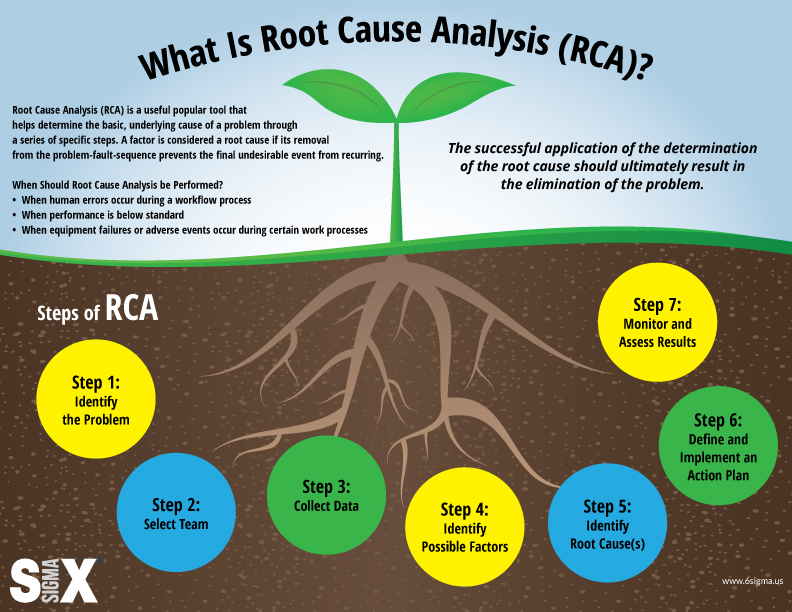
The ultimate goal of RCA in flight technology is three-fold: prevention, optimization, and compliance.
- Prevention: Ensuring a specific failure mode never recurs.
- Optimization: Identifying inefficiencies in the flight code or hardware layout that contribute to system stress.
- Compliance: In the commercial and industrial drone sectors, regulatory bodies often require a formal RCA report following an incident to ensure the technology meets airworthiness standards.
Methodologies for Executing a Technical RCA
Flight technology is inherently complex, involving the fusion of mechanical, electrical, and software components. To navigate this complexity, several established methodologies are used to conduct an effective RCA.
The 5 Whys Technique Applied to Avionics
The “5 Whys” is a deceptively simple yet powerful tool. It involves asking “Why?” repeatedly until the fundamental cause is unmasked. Consider a drone that lost its GPS signal mid-flight:
- Why did the drone lose GPS? The signal strength dropped below the threshold.
- Why did the signal strength drop? The GPS antenna lost its lock on satellites.
- Why did the antenna lose its lock? There was high-frequency noise interference.
- Why was there noise interference? The 5.8GHz video transmitter was leaking RF noise.
- Why was the transmitter leaking noise? The grounding wire on the transmitter was improperly soldered during assembly.
In this case, the “Root Cause” is a manufacturing defect in the soldering process, not a failure of the GPS technology itself.
Fault Tree Analysis (FTA) for Hardware Failures
Fault Tree Analysis is a top-down, deductive failure analysis that uses Boolean logic to combine various lower-level events. In drone flight technology, this is used to understand how a combination of small errors can lead to a “Top Event,” such as a total loss of control.
For instance, a drone might stay in the air if one sensor fails, but it might crash if a sensor fails while the battery is below 20%. FTA helps engineers visualize these pathways and build “fail-safe” protocols into the navigation software, ensuring that the flight controller knows how to prioritize data when the system is compromised.
Failure Mode and Effects Analysis (FMEA)
While most RCA is reactive (done after a crash), FMEA is a proactive branch of RCA. It involves looking at every component—the IMU, the barometer, the GPS, the compass—and asking, “How could this fail, and what would the effect be on the flight path?” By ranking these risks by severity and probability, flight tech developers can focus their engineering efforts on the most critical stabilization systems.
Identifying Common Flight Technology Failures via RCA
Through years of RCA application, the industry has identified recurring themes in flight technology failures. Understanding these common “root causes” allows for the design of more robust navigation systems.
Navigation and GPS Glitch Diagnostics
One of the most frequent subjects of RCA is “GPS Glitching.” When a drone’s position suddenly jumps 50 meters in the flight controller’s “mind,” the stabilization system will attempt to “correct” this jump by tilting the drone aggressively toward the perceived correct location.
RCA often reveals that these glitches are caused by “Multipath Interference,” where GPS signals bounce off tall buildings or metal structures before reaching the drone. This realization has led to the development of “Dual-Band GNSS” and “Vision Positioning Systems,” which use optical sensors to verify GPS data, providing a layer of technological redundancy that prevents a single sensor error from causing a flyaway.
IMU and Sensor Drift Complications
The Inertial Measurement Unit (IMU) is the “inner ear” of the drone, responsible for sensing tilt and acceleration. A common RCA finding in drones that exhibit “drift” is excessive vibration. High-frequency vibrations from unbalanced propellers can create “noise” in the accelerometer data.
Through RCA, engineers discovered that the root cause was often not the sensor itself, but the physical mounting of the flight controller. This led to the innovation of dampened IMUs and internal floating heat sinks that isolate the sensors from the drone’s mechanical vibrations, significantly improving flight stability in professional-grade UAVs.
Signal Interference and Link Loss
When a drone loses its connection to the ground station, the RCA often focuses on the Radio Frequency (RF) environment. Root causes are frequently found in “Fresnel Zone” obstructions or channel crowding in the 2.4GHz spectrum. These findings have driven the shift toward frequency-hopping spread spectrum (FHSS) technology and the integration of LTE-based command and control links, which bypass traditional RF limitations.
Implementing RCA Findings for Future Flight Stabilization
The true value of RCA lies in its ability to influence the next generation of flight technology. Every post-flight analysis contributes to a larger database of knowledge that informs hardware and software iteration.
Refining Control Loops and PID Tuning
RCA often reveals that a drone’s stabilization issues are caused by poorly tuned PID (Proportional, Integral, Derivative) loops. If the “D-term” is too high, the drone may oscillate and overheat the motors; if it is too low, the drone will feel “mushy” and unresponsive. By using RCA to analyze flight logs, developers can fine-tune these mathematical algorithms to match the specific weight and aerodynamics of the airframe, resulting in “locked-in” flight characteristics.
Hardware Redundancy and Fail-Safe Protocols
The most significant impact of RCA in flight technology has been the move toward triple-redundancy. Modern high-end flight controllers often feature three separate IMUs and two or three GPS compasses. The flight software uses “voting logic” to compare data from all sensors. If one sensor provides an outlier reading (a “root cause” of many past crashes), the system ignores it and relies on the remaining two. This “fail-operational” architecture is a direct result of decades of RCA in manned and unmanned aviation.
Software Updates and Firmware Iteration
In the world of smart drones, the root cause is often found in the code. A “buffer overflow” or a “logic error” in the return-to-home (RTH) sequence can lead to disaster. RCA allows software engineers to find these “edge cases”—scenarios that only happen under very specific conditions—and patch them via firmware updates. This process of continuous improvement ensures that the technology becomes safer over its lifecycle, rather than more prone to failure.

The Evolution of RCA in Autonomous Flight
As we move toward a future of fully autonomous, “beyond visual line of sight” (BVLOS) flight, the role of RCA is evolving. We are now seeing the integration of Artificial Intelligence (AI) in the RCA process. Advanced flight systems are beginning to perform “Real-Time RCA,” where the onboard computer monitors its own health and diagnoses potential failures before they even occur.
For example, if an AI-driven flight system detects a slight increase in the current draw of a specific motor, it can perform a real-time RCA to determine if a bearing is failing. It can then preemptively adjust the flight path or trigger an early landing. This transition from reactive Root Cause Analysis to predictive system health management is the next great frontier in drone flight technology.
Ultimately, RCA is the bridge between a “gadget” and a professional aeronautical tool. By obsessively seeking the root cause of every anomaly, the flight technology industry continues to push the boundaries of what is possible, turning the lessons learned from every failed flight into the foundation of the next successful mission. Understanding the “RCA” is not just about fixing what is broken; it is about building a future where flight technology is as reliable as the physics that keep it in the air.