The Chi-square test is a fundamental statistical tool, particularly prevalent in the realms of data analysis and scientific research. Within the context of drone technology, specifically in areas like sensor calibration, flight path analysis, and the validation of AI algorithms, understanding the significance of the p-value derived from a Chi-square test is paramount for making informed decisions and ensuring the reliability of operational outcomes. This article will delve into the essence of the p-value in Chi-square tests, explaining its interpretation and its crucial role in the context of advancing drone technology.
The Foundations of Hypothesis Testing with Chi-Square
Before we can truly grasp the p-value, we need to establish the groundwork upon which the Chi-square test operates: hypothesis testing. In essence, hypothesis testing is a statistical method used to make decisions or draw conclusions about a population based on sample data. It involves setting up two competing hypotheses: the null hypothesis and the alternative hypothesis.

The Null Hypothesis (H₀)
The null hypothesis represents the status quo or the absence of an effect. In the context of drone technology, a null hypothesis might propose that there is no significant difference between the observed performance of a new navigation algorithm and its expected performance, or that a certain environmental factor has no impact on sensor readings. For example, if we are testing the accuracy of a GPS system, H₀ might state that there is no statistically significant deviation from the expected positional accuracy.
The Alternative Hypothesis (H₁)
The alternative hypothesis, conversely, posits that there is a significant effect or difference. It is what the researcher hopes to find evidence for. In our drone examples, H₁ could suggest that the new navigation algorithm does show a significant improvement, or that the environmental factor does measurably affect sensor readings. For the GPS accuracy test, H₁ might state that there is a statistically significant deviation from the expected positional accuracy, indicating a problem.
The Chi-square test is a non-parametric statistical test used to analyze categorical data. It is particularly useful for comparing observed frequencies with expected frequencies. In drone applications, this could involve analyzing the frequency of successful obstacle avoidance maneuvers under different conditions, or assessing whether the distribution of captured images across different categories (e.g., urban, rural, industrial) aligns with expectations.
Understanding the Chi-Square Statistic
The Chi-square statistic ($chi^2$) itself quantifies the discrepancy between the observed frequencies in our data and the frequencies that would be expected if the null hypothesis were true. A larger Chi-square value indicates a greater difference between observed and expected values, suggesting that the null hypothesis may be unlikely to be true.
Calculating the Chi-Square Statistic
The formula for the Chi-square statistic is:
$chi^2 = sum frac{(Oi – Ei)^2}{E_i}$
Where:
- $O_i$ represents the observed frequency in category $i$.
- $E_i$ represents the expected frequency in category $i$ (calculated based on the null hypothesis).
- The sum ($sum$) is taken over all categories.
In drone development, for instance, we might use a Chi-square test to compare the observed number of times a drone successfully avoids obstacles with the expected number of avoidance maneuvers based on its design specifications and a set of simulated scenarios. If the observed frequencies are very different from the expected ones, the $chi^2$ value will be high.
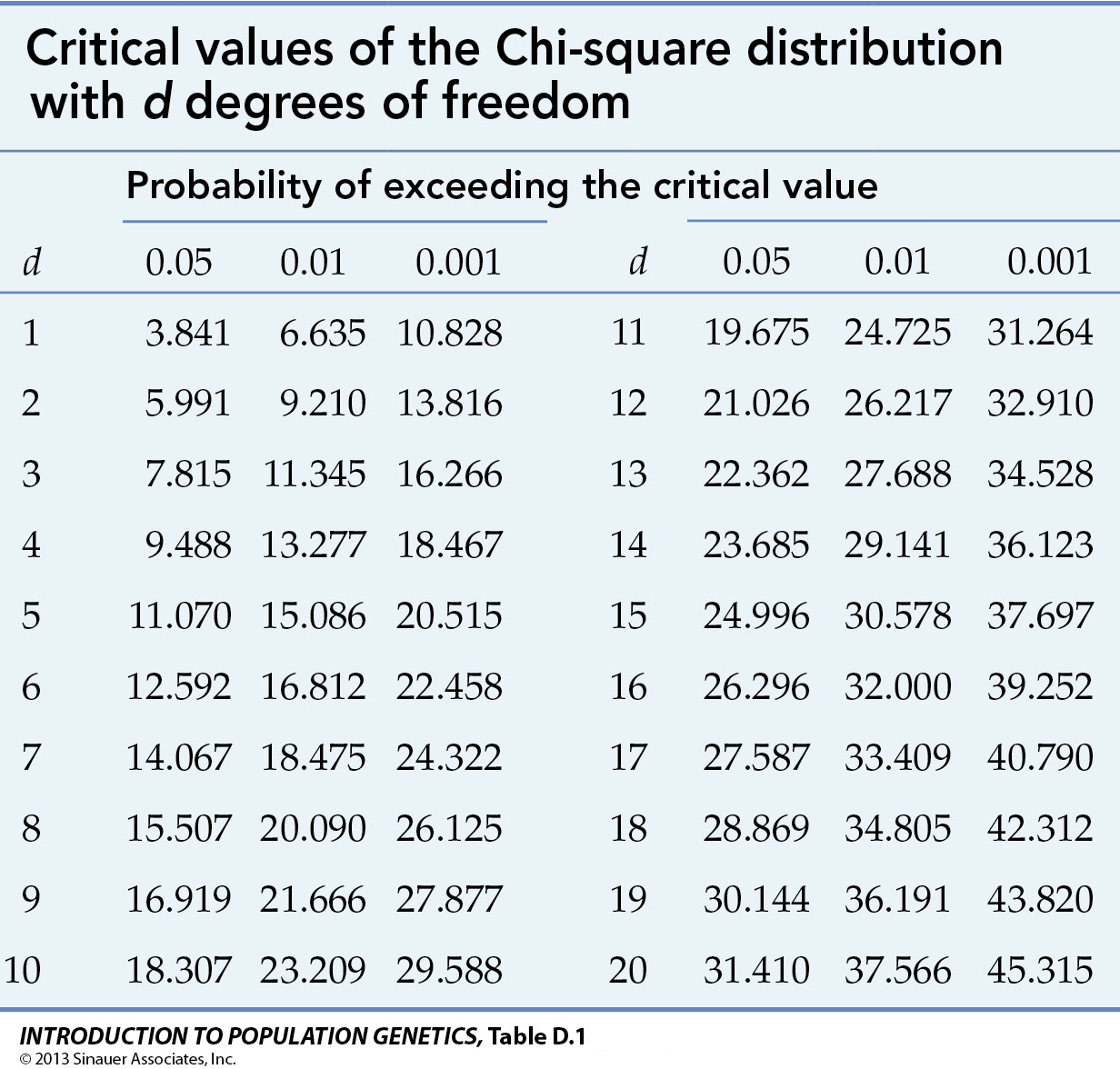
Degrees of Freedom
Another critical component of the Chi-square test is the concept of degrees of freedom (df). The degrees of freedom represent the number of independent values that can vary in the calculation of a statistic. For a Chi-square test of independence (which is common when analyzing relationships between two categorical variables), the degrees of freedom are calculated as:
$df = (r-1)(c-1)$
Where:
- $r$ is the number of rows in the contingency table.
- $c$ is the number of columns in the contingency table.
In a drone context, consider a test assessing whether the type of terrain (e.g., urban, forest, open field) influences the accuracy of a drone’s mapping capabilities. Here, terrain type would be one categorical variable, and mapping accuracy (e.g., high, medium, low) would be another. The degrees of freedom would be determined by the number of terrain types and the number of accuracy levels. The degrees of freedom influence the shape of the Chi-square distribution and, consequently, the interpretation of the p-value.
The P-value: The Heart of Statistical Significance

The p-value is the probability of obtaining observed results, or results more extreme, assuming that the null hypothesis is true. It is the cornerstone of inferential statistics and directly addresses the question of whether our observed data provides sufficient evidence to reject the null hypothesis.
Interpreting the P-value
A small p-value indicates that the observed data is unlikely to have occurred by random chance alone if the null hypothesis were true. Conversely, a large p-value suggests that the observed data is reasonably likely to occur even if the null hypothesis is true.
The p-value is always a number between 0 and 1.
- A p-value of 0.05 means there is a 5% chance of observing the data (or more extreme data) if the null hypothesis is true.
- A p-value of 0.001 means there is only a 0.1% chance.
- A p-value of 0.80 means there is an 80% chance.
In drone development, imagine testing a new vision-based obstacle avoidance system. We collect data on how many times the drone successfully detects and avoids obstacles in a simulated environment. If our Chi-square test yields a p-value of 0.03, it suggests that there’s only a 3% probability of seeing our observed success rate (or better) if the avoidance system was, in reality, ineffective (the null hypothesis). This low probability leads us to question the null hypothesis.
The Significance Level (Alpha, $alpha$)
To make a decision about rejecting or failing to reject the null hypothesis, we compare the p-value to a pre-determined significance level, commonly denoted by the Greek letter alpha ($alpha$). The significance level is the probability of rejecting the null hypothesis when it is actually true (a Type I error). Common alpha levels are 0.05 (5%), 0.01 (1%), and 0.10 (10%).
- If p-value $le alpha$: We reject the null hypothesis. This means the observed results are statistically significant, and we have sufficient evidence to support the alternative hypothesis.
- If p-value $> alpha$: We fail to reject the null hypothesis. This means the observed results are not statistically significant, and we do not have enough evidence to reject the null hypothesis. We cannot conclude that the alternative hypothesis is true.
For our drone obstacle avoidance system, if we set our significance level ($alpha$) at 0.05 and our p-value is 0.03, since 0.03 $le$ 0.05, we would reject the null hypothesis. This would lead us to conclude that the new avoidance system is statistically significantly effective. If the p-value had been 0.10, and $alpha$ was 0.05, we would fail to reject the null hypothesis, meaning we don’t have strong enough evidence to claim the system is effective based on this data.
The Role of the P-value in Drone Technology Applications
The p-value’s application in drone technology is far-reaching, impacting crucial areas from hardware validation to software development and operational deployment.
Validating Sensor Performance and Calibration
Drones rely on a suite of sensors – gyroscopes, accelerometers, magnetometers, barometers, and GPS receivers – to navigate, stabilize, and capture data accurately. Chi-square tests, with their associated p-values, are instrumental in validating the performance of these sensors. For example, when calibrating a new inertial measurement unit (IMU), researchers might compare the drift of the sensor over time against established benchmarks or theoretical expectations. A Chi-square test can assess if the observed pattern of drift is statistically different from what is expected under normal operating conditions. A p-value below the chosen significance level would indicate a calibration issue or a potential fault in the sensor, prompting further investigation or recalibration.
Similarly, when assessing the accuracy of a LiDAR or camera-based mapping system, Chi-square tests can be used to compare the observed distribution of points or features against a ground truth model. If the p-value is low, it suggests that the system is not performing as expected, potentially due to environmental factors, hardware limitations, or software processing errors.
Evaluating Flight Control Algorithms and AI Models
The sophisticated flight control systems and artificial intelligence (AI) models that power autonomous drones are continuously being developed and refined. Chi-square tests play a vital role in evaluating the effectiveness of these algorithms. For instance, in assessing the performance of an AI-powered object detection system, a Chi-square test might be used to compare the observed number of correctly identified objects against the number of false positives and false negatives. The p-value would indicate whether the algorithm’s performance is statistically significantly better than random chance or a baseline model.
Autonomous flight path planning is another area where hypothesis testing with Chi-square is relevant. Researchers might hypothesize that a new pathfinding algorithm reduces flight time or energy consumption compared to a standard algorithm. They would then collect data on flight durations for both algorithms and use a Chi-square test (or a related test if data is continuous) to see if the difference in observed outcomes is statistically significant, with the p-value guiding their decision. A low p-value would support the claim that the new algorithm is superior.
Analyzing Operational Data and Anomaly Detection
In the operational deployment of drones, vast amounts of data are generated from flight logs, sensor readings, and mission outcomes. Chi-square tests can be employed to analyze this data for patterns, anomalies, or the impact of specific variables. For example, a drone operator might want to determine if certain weather conditions (e.g., wind speed categories) have a statistically significant impact on mission completion rates. They could set up a Chi-square test where the null hypothesis is that weather conditions have no effect on mission completion. The p-value from this test would tell them whether observed variations in completion rates are likely due to the weather or just random fluctuation.
Furthermore, in anomaly detection, Chi-square tests can help identify deviations from expected operational behavior. If a drone’s flight parameters or sensor readings suddenly deviate from historical norms in a way that is statistically unlikely under normal operation (indicated by a low p-value), it could signal a malfunction, a cyber-attack, or an unforeseen environmental hazard.
Conclusion: Embracing Statistical Rigor in Drone Advancement
The p-value, in the context of a Chi-square test, is more than just a number; it is a critical indicator of statistical significance. It provides a quantifiable measure of the evidence against the null hypothesis, allowing researchers and engineers in the drone industry to make data-driven decisions with a defined level of confidence. By understanding how to interpret p-values, professionals can rigorously validate sensor performance, assess the efficacy of advanced algorithms, and gain deeper insights from operational data. Embracing this statistical rigor is essential for the continued innovation, reliability, and safety of drone technology, paving the way for more sophisticated applications and wider adoption across diverse sectors. The Chi-square test and its accompanying p-value empower us to move beyond guesswork and towards evidence-based conclusions, propelling the future of uncrewed aerial systems forward.