Understanding the fundamental principles behind mathematical operations is crucial, even when these principles seem abstract. This is particularly true in fields that rely heavily on precision and calculation, such as advanced drone navigation and control systems. While seemingly unrelated, the concept of the least common denominator (LCD) plays a subtle yet vital role in ensuring accuracy and efficiency in various technological applications.
The Foundation: Understanding Denominators and Common Multiples
At its core, the least common denominator is a concept derived from arithmetic, specifically dealing with fractions. A denominator is the bottom number in a fraction, representing the total number of equal parts into which a whole is divided. For example, in the fraction 1/4, the denominator is 4, meaning the whole is divided into four equal parts.
When we work with multiple fractions, especially when performing operations like addition or subtraction, it becomes necessary to have a common basis for comparison. This is where the idea of multiples comes into play. A multiple of a number is the result of multiplying that number by an integer (1, 2, 3, and so on).
To find a common denominator for two or more fractions, we need to find a number that is a multiple of all their individual denominators. This common multiple allows us to rewrite the fractions with the same denominator, making it easier to compare their values or combine them.
Identifying Multiples
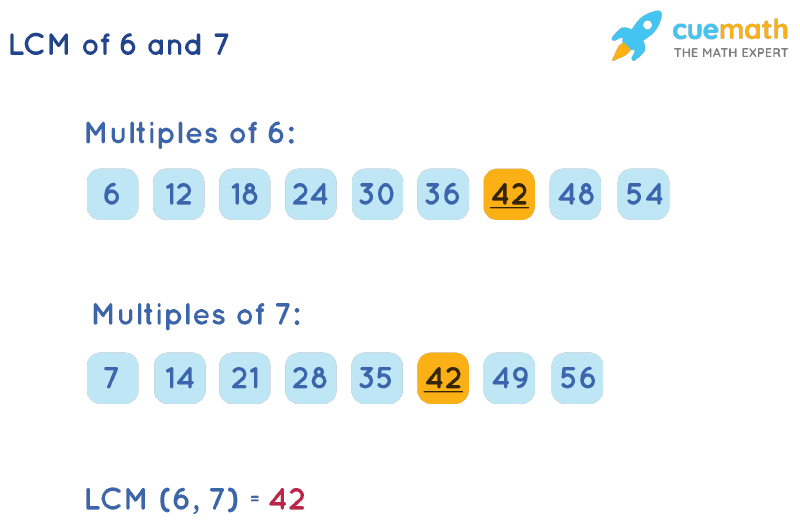
Let’s consider the numbers 6 and 7. To find their common multiples, we can list out their individual multiples:
- Multiples of 6: 6, 12, 18, 24, 30, 36, 42, 48, 54, 60, 66, 72, 78, 84, …
- Multiples of 7: 7, 14, 21, 28, 35, 42, 49, 56, 63, 70, 77, 84, …
By comparing these lists, we can see that there are numbers that appear in both lists. These are the common multiples of 6 and 7. In the example above, 42 and 84 are common multiples.
The Least Common Multiple (LCM)
The least common multiple (LCM) is the smallest positive number that is a multiple of two or more numbers. In the context of fractions, the LCM of the denominators is the least common denominator (LCD).
The Least Common Denominator (LCD) of 6 and 7
To find the least common denominator of 6 and 7, we need to find the least common multiple of 6 and 7.
Looking back at our lists of multiples:
- Multiples of 6: 6, 12, 18, 24, 30, 36, 42, 48, …
- Multiples of 7: 7, 14, 21, 28, 35, 42, 49, …
The smallest number that appears in both lists is 42. Therefore, the least common denominator of 6 and 7 is 42.
Prime Factorization: A Systematic Approach to Finding the LCD
While listing multiples works for smaller numbers, a more systematic and efficient method, especially for larger numbers or when dealing with more than two numbers, is prime factorization. This method is fundamental to many advanced computational algorithms used in technology.
The Process of Prime Factorization
Prime factorization involves breaking down a number into its prime factors – the prime numbers that multiply together to give the original number. A prime number is a natural number greater than 1 that has no positive divisors other than 1 and itself (e.g., 2, 3, 5, 7, 11).
Let’s apply this to 6 and 7:
-
Prime factorization of 6:
- 6 can be divided by 2, which is a prime number: 6 ÷ 2 = 3.
- 3 is also a prime number.
- So, the prime factorization of 6 is 2 × 3.
-
Prime factorization of 7:
- 7 is already a prime number. Its prime factorization is simply 7.
Calculating the LCD Using Prime Factors
Once we have the prime factorizations of each number, we can find the LCM (and thus the LCD) by following these steps:
- Identify all unique prime factors present in any of the factorizations.
- For each unique prime factor, take the highest power that appears in any of the factorizations.
- Multiply these highest powers together.
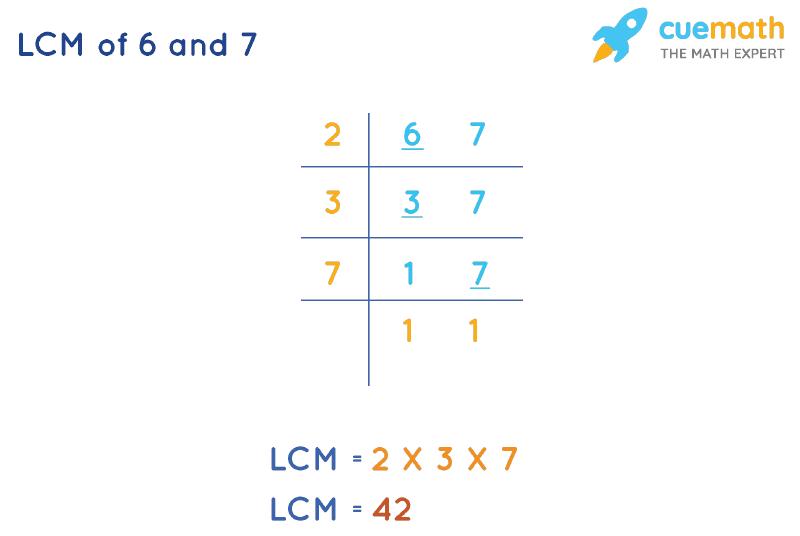
Let’s apply this to 6 (2 × 3) and 7 (7):
- Unique prime factors: The unique prime factors are 2, 3, and 7.
- Highest power of each unique prime factor:
- The highest power of 2 is 2¹ (from the factorization of 6).
- The highest power of 3 is 3¹ (from the factorization of 6).
- The highest power of 7 is 7¹ (from the factorization of 7).
- Multiply the highest powers: 2¹ × 3¹ × 7¹ = 2 × 3 × 7 = 42.
This confirms that the least common denominator of 6 and 7 is 42. This method is highly scalable and forms the basis for algorithms that handle complex numerical relationships, essential for sophisticated drone operations.
Relevance to Drone Technology and Flight Systems
The seemingly simple concept of the least common denominator, and its underlying principle of finding common multiples, finds profound application in various aspects of drone technology, particularly in areas requiring precise coordination, data synchronization, and efficient resource allocation.
Sensor Data Fusion and Synchronization
Modern drones are equipped with a multitude of sensors: GPS for location, IMUs (Inertial Measurement Units) for orientation and acceleration, barometers for altitude, magnetometers for heading, cameras for imaging, and potentially lidar or ultrasonic sensors for obstacle detection. These sensors often operate at different sampling rates, meaning they collect data at different frequencies (e.g., GPS at 1Hz, IMU at 100Hz, camera at 30fps).
For the drone’s flight control system to interpret and act upon this data coherently, it must be synchronized. This synchronization process often involves aligning data points to a common temporal reference. Imagine trying to combine altitude readings from a barometer (e.g., every 50 milliseconds) with GPS position updates (e.g., every 200 milliseconds). The flight control unit needs to effectively “interpolate” or “aggregate” data such that it has a consistent stream of information.
This is analogous to finding a common denominator for fractions representing different time intervals. If sensor A samples every $tA$ seconds and sensor B samples every $tB$ seconds, the flight controller might need to process data in time intervals that are a common multiple of $tA$ and $tB$. The least common multiple of these sampling periods defines the smallest time interval at which all sensor data can be considered in relation to each other, allowing for accurate state estimation and control. Without this underlying mathematical principle, the data streams would become chaotic, leading to erratic flight behavior, inaccurate navigation, and potential system failures.
Navigation and Trajectory Planning
When a drone is tasked with following a complex flight path, especially in environments with dynamic obstacles or when coordinating with multiple drones, its navigation system must perform intricate calculations. Trajectory planning involves defining a sequence of waypoints and the flight parameters (speed, altitude, heading) between them.
Consider a scenario where a drone needs to execute a series of maneuvers, each requiring precise timing. For instance, a cinematic shot might involve a smooth ascent, a camera pan, and then a rapid descent. Each of these movements has an associated duration. If these durations are fractions of a second, say 1.5 seconds for the ascent and 0.75 seconds for the descent, the control system needs to find a common temporal reference to ensure the transitions are seamless.
This is directly related to finding a common denominator for the time intervals. If a critical control loop operates at a certain frequency, say 100 times per second (every 0.01 seconds), and a specific maneuver takes 1.5 seconds, the system needs to understand how many control loop cycles correspond to that maneuver. This involves finding the relationship between the maneuver’s duration and the control loop’s period. Expressing these durations in a common unit (akin to finding a common denominator) allows the system to accurately schedule and execute each part of the trajectory. The LCD ensures that the smallest consistent time unit is used, minimizing computational overhead while maintaining accuracy.
Communication Protocols and Data Packetization
Drones communicate with ground control stations and other airborne units through various wireless protocols. These protocols define how data is packaged into packets for transmission. The size of these data packets and the transmission rates are often optimized for efficiency and reliability.
Imagine a scenario where a drone needs to send telemetry data (position, altitude, battery status) and receive commands from the ground. If the telemetry data is structured in chunks of, say, 6 bytes per update, and the command structure involves packets of 7 bytes, the communication system needs to manage the flow of these different packet types efficiently.
While this is a simplified analogy, it highlights the need for common units in data handling. In a more complex scenario, different sensors might generate data streams that need to be bundled into packets of varying sizes, and these packets are transmitted at different rates. The underlying protocols and algorithms that manage this data flow rely on mathematical principles to ensure that data is transmitted and received without loss or corruption, and that the communication bandwidth is utilized effectively. Finding commonalities in the timing and size of data units, much like finding a common denominator for fractions, is essential for robust communication.
Resource Management and Scheduling in Autonomous Swarms
When multiple drones operate in a coordinated swarm, precise scheduling and resource management become paramount. Each drone might have unique operational parameters, such as flight endurance based on battery capacity, or sensor capabilities that are best utilized at specific times or in specific configurations.
Suppose a swarm of drones is tasked with a complex aerial mapping mission. Some drones might be equipped with high-resolution cameras for detailed imagery, while others have wider-angle sensors for broader coverage. These sensors might have different data output rates and processing requirements. To ensure that the entire area is mapped efficiently and without redundant effort, the flight control system for the swarm needs to schedule the operations of each drone.
This scheduling problem can involve coordinating actions that occur at different intervals. For example, one drone might perform a high-detail scan every 10 seconds, while another performs a broader scan every 15 seconds. To synchronize these operations and ensure optimal coverage, the swarm’s central coordinator would need to find a common time interval for coordinating their actions. This common interval would be the least common multiple of their individual scanning cycles (in this case, 30 seconds). The LCD ensures that the system can manage and synchronize these disparate operational cycles effectively, maximizing the mission’s efficiency and coverage.
Conclusion: The Ubiquitous Nature of Mathematical Foundations
The question of “what is the least common denominator of 6 and 7” might appear to be a purely academic exercise. However, it serves as a gateway to understanding fundamental mathematical principles that underpin a vast array of modern technologies. From the intricate calculations guiding autonomous drone navigation and sensor data fusion to the efficient management of communication protocols and the coordinated operations of drone swarms, the concepts of multiples, common denominators, and least common multiples are silently at work. Mastering these basic mathematical building blocks is not just about solving textbook problems; it’s about grasping the foundational logic that enables the sophisticated capabilities we increasingly rely on in the realm of flight technology and beyond.