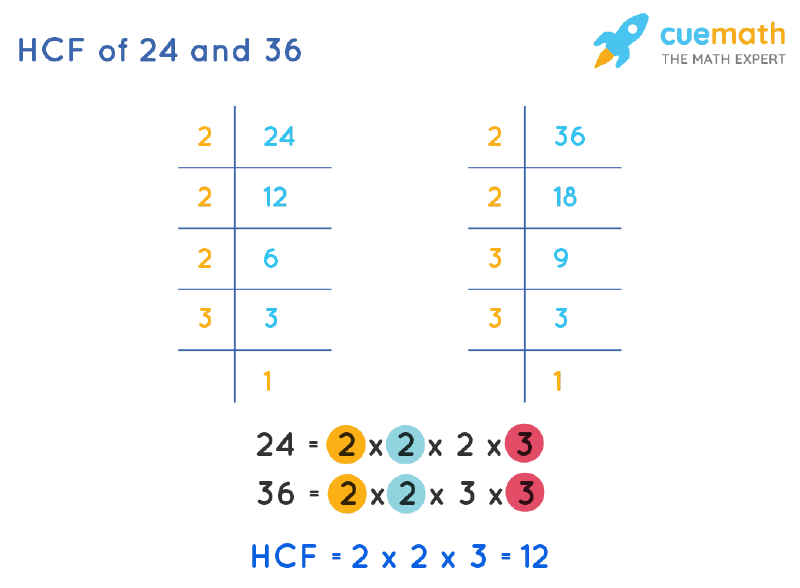
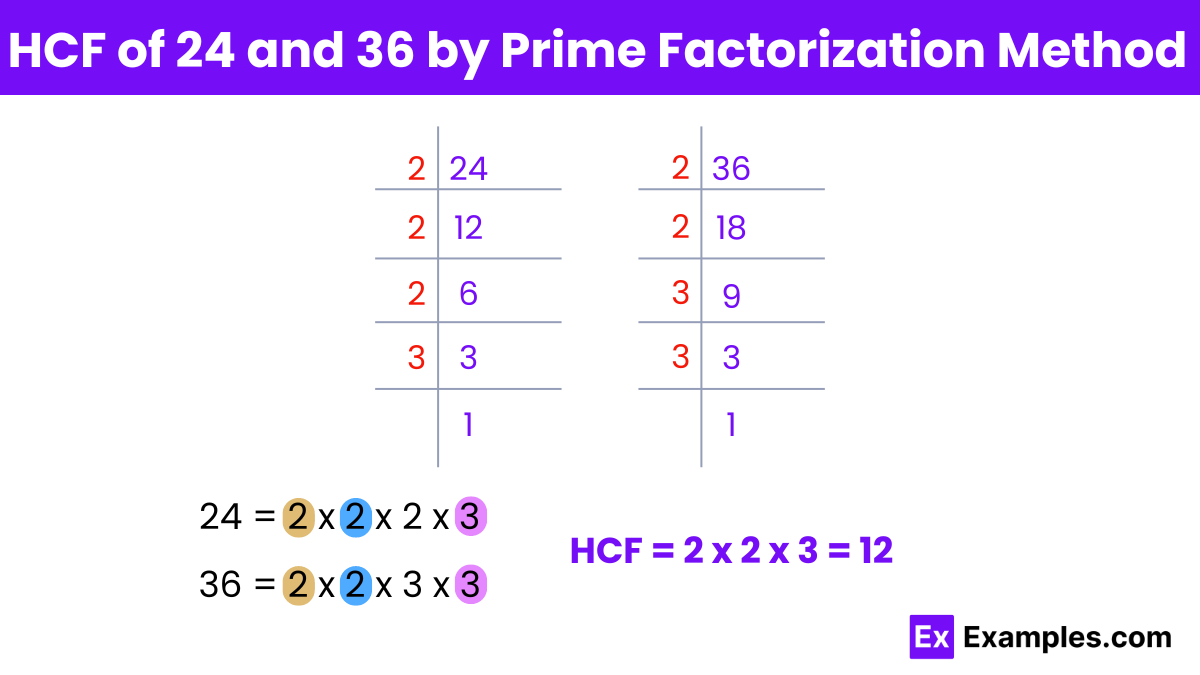
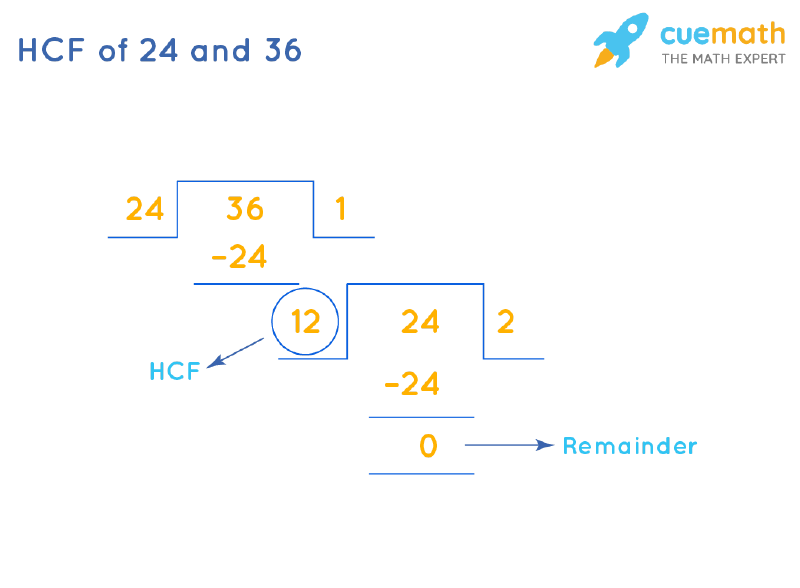
In the realm of advanced drone technology and innovation, the seemingly simple mathematical concept of a “highest common factor” (HCF) transcends its elementary definition, serving as a powerful metaphor for system optimization, synchronized operations, and efficient resource allocation. While the numerical answer to the highest common factor of 24 and 36 is precisely 12, its true value within the context of contemporary unmanned aerial vehicles (UAVs) lies in the principles it embodies: identifying maximal commonality, ensuring seamless integration, and enhancing the overall robustness of complex technological ecosystems. This article explores how the abstract mathematical principle of HCF underpins critical aspects of drone tech and innovation, from multi-sensor data fusion to the intelligent design of autonomous systems.
Unlocking Synergies in Multi-Sensor Drone Systems
Modern drones are not merely flying cameras; they are sophisticated platforms integrating an array of sensors, processing units, and communication modules. The efficiency and reliability of these systems hinge on their ability to synchronize diverse data streams and operational cycles. Consider a high-performance drone equipped for remote sensing and mapping, where multiple payloads contribute to a comprehensive data capture.
Precision Timing and Data Fusion
Imagine an optical imaging sensor operating at a native refresh rate that cycles every 24 milliseconds, capturing crisp visual data. Simultaneously, a LiDAR scanner, essential for precise topographical mapping and obstacle avoidance, might operate on a different temporal rhythm, completing its scan cycles every 36 milliseconds. To generate a unified, real-time 3D model of the environment or to execute complex autonomous flight maneuvers, the drone’s onboard flight controller and AI processing unit must effectively merge these disparate data streams. This challenge is directly analogous to finding the highest common factor. The HCF, in this context, represents the largest possible interval at which both data streams can be perfectly aligned and processed synchronously without data loss or latency buildup. For 24 and 36, this optimal synchronization point is every 12 milliseconds. Operating at such a common interval allows for efficient data sampling, reduces computational overhead by avoiding redundant processing, and ensures that the fused output is temporally coherent, leading to more accurate environmental understanding and more responsive decision-making by the drone’s AI. This fundamental principle ensures that critical information, whether for navigation, target identification, or environmental analysis, is always current and integrated, preventing discrepancies that could lead to errors in flight path execution or data interpretation.
Optimizing Processing Workloads
Beyond mere synchronization, the HCF principle also informs the optimization of computational workloads. When processing units must handle data from multiple sensors with varying operational frequencies, identifying the largest common divisor allows for the creation of processing queues and cycles that are maximally efficient. Instead of running separate, potentially overlapping or inefficient processing threads for each sensor’s unique cycle, a system designed with HCF in mind can establish a master processing cycle based on this common factor. This means that at every 12-millisecond mark, for instance, the system can expect and process a coherent block of data from both the 24ms and 36ms sensors, ensuring balanced resource utilization. This approach minimizes idle CPU time, prevents bottlenecks, and enhances the overall real-time performance of the drone’s computational brain. It’s a critical design consideration for embedded systems where power consumption and processing capacity are finite resources. By reducing processing redundancy and enabling predictive scheduling of tasks, drones can achieve longer flight times, execute more complex algorithms, and operate with greater reliability in demanding conditions.
Designing Modular & Interoperable Drone Architectures
The modularity of drone components, from propulsion systems to payload mounts and software modules, is a cornerstone of innovation, enabling customization, upgrades, and broader adoption. The concept of HCF finds practical application in designing systems where components from various manufacturers or generations must seamlessly integrate.
Standardizing Communication Protocols
In a rapidly evolving landscape of drone technology, interoperability is paramount. Different subsystems—flight controllers, ESCs (Electronic Speed Controllers), GPS modules, and camera gimbals—often communicate using various protocols or data packet sizes. Imagine a communication bus designed to handle data packets in segments of 24 bytes from one critical subsystem (e.g., flight telemetry) and 36 bytes from another (e.g., payload control). To ensure robust and error-free communication across the entire drone’s network, the underlying communication protocol or data handling middleware must effectively manage these diverse packet sizes. The highest common factor (12 bytes) here would represent an optimal common unit for packet segmentation or aggregation, allowing for efficient parsing and transmission across the bus. This prevents fragmented data, minimizes retransmission rates, and ensures that all subsystems can reliably “speak the same language,” or at least understand each other’s data structures through a common denominator. Such standardization allows for plug-and-play functionality, reducing development time and fostering a more open ecosystem for drone hardware and software.
Scalability and System Upgrades
The principle of HCF extends to the physical and logical architecture of drone systems, especially concerning scalability and future upgrades. When designing modular frames, power distribution boards, or software development kits (SDKs), creating interfaces or API endpoints that align with common factors allows for greater flexibility. If mounting points for various payloads are designed to be divisible by a common unit, or if software modules are structured to process data in blocks that are common factors of potential input sizes, upgrading or swapping components becomes significantly simpler. For instance, designing a universal power management system that can efficiently allocate power in increments that are common factors of various motor and sensor power requirements ensures that different configurations can be supported with minimal redesign. This forward-thinking approach ensures that as new technologies emerge, they can be integrated into existing drone platforms without necessitating a complete overhaul, extending the lifespan and utility of drone investments.
The Mathematics of Autonomous Flight Optimization
Autonomous flight represents the pinnacle of drone innovation, relying heavily on sophisticated algorithms and precise execution. The HCF principle, while abstract, offers insights into optimizing these complex processes.
Coordinated Swarm Behavior
For multi-drone operations, particularly in swarm intelligence, the coordination of individual units is critical. If individual drones within a swarm have different processing capabilities or sensor refresh rates—perhaps some execute navigation algorithms every 24 cycles while others perform collaborative mapping updates every 36 cycles—achieving coherent swarm behavior necessitates a robust synchronization mechanism. The HCF here denotes the largest common interval at which all drones can collectively re-evaluate their positions, share data, and update their mission parameters. This ensures that the swarm acts as a unified entity, avoiding collisions, optimizing search patterns, and efficiently covering large areas. This concept is vital for applications like precision agriculture, infrastructure inspection, or disaster response, where coordinated action significantly outperforms individual drone capabilities. The HCF helps define the “heartbeat” of the swarm, dictating when and how often critical information is exchanged and acted upon by all members.
Predictive Maintenance Schedules
Autonomous drones, especially those deployed in critical missions, demand rigorous maintenance. The HCF concept can be applied to develop intelligent predictive maintenance schedules. Consider two critical components with different expected service intervals: Component A requires inspection every 24 flight hours, while Component B requires a more detailed overhaul every 36 flight hours. By finding the highest common factor (12 hours in this case), maintenance managers can identify optimal scheduling points where multiple components can be serviced concurrently, minimizing downtime and maximizing operational readiness. For example, a minor inspection could occur at 12 hours, while a major one that also covers the 24-hour cycle could be scheduled at 24 hours, and then at 36 hours, both components could receive their respective services. This proactive approach, informed by the HCF, translates directly into increased fleet availability, reduced operational costs, and enhanced safety by preventing unexpected failures of critical components.
From Abstract Math to Tangible Innovation
The highest common factor of 24 and 36, numerically 12, serves as more than just an answer to a math problem; it’s a symbolic representation of a fundamental principle essential for the advancement of drone technology and innovation. It underscores the importance of seeking common ground, optimal integration points, and efficient modularity in increasingly complex systems.
Enhancing AI Decision-Making
AI algorithms, especially those driving autonomous flight and intelligent data analysis, thrive on structured and synchronized data. When an AI drone is tasked with real-time decision-making, it needs a consistent flow of information from all its sensors and subsystems. The principle of HCF guides the development of AI architectures that can effectively ingest and process multi-rate data, enabling more robust pattern recognition, predictive analytics, and adaptive control. By ensuring that the AI operates on a maximally synchronized data set, its decision-making processes become more reliable, faster, and more capable of handling dynamic and unpredictable environments, pushing the boundaries of what autonomous systems can achieve.
Future Directions in Integrated Systems
As drones become more sophisticated, integrating with broader IoT networks, cloud computing platforms, and manned aviation ecosystems, the challenges of interoperability and synchronization will only multiply. The pursuit of “highest common factors” – not just in numbers, but in protocols, design philosophies, and operational cycles – will be crucial. This foundational understanding allows engineers and innovators to build more resilient, adaptable, and intelligent drone platforms, ensuring they remain at the forefront of technological advancement. The abstract mathematical concept thus becomes a tangible tool for developing the next generation of highly integrated, autonomous, and capable drone systems that will redefine industries and capabilities across the globe.