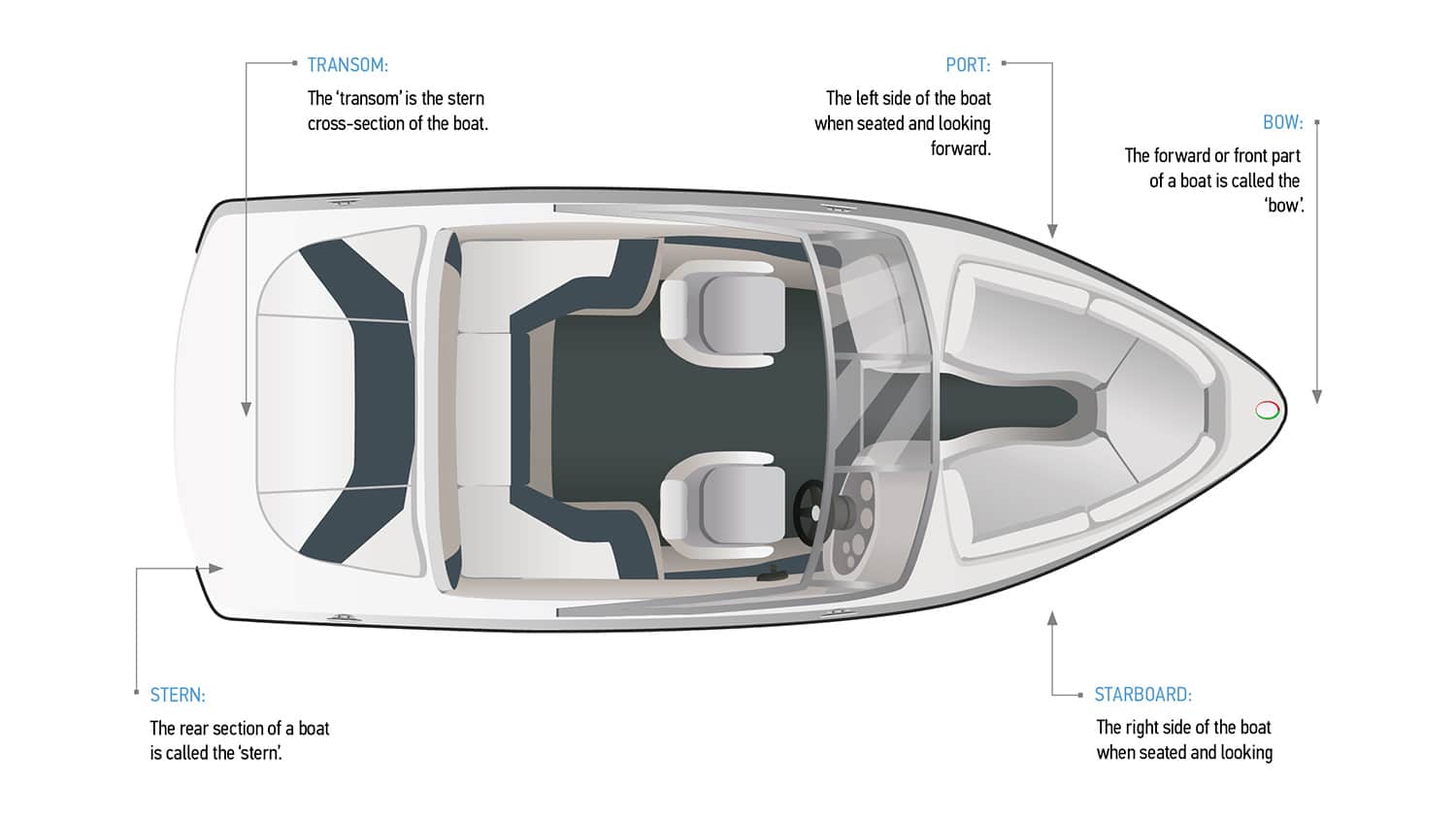
The front of a boat is universally known as the bow. This fundamental piece of nautical terminology, while seemingly basic, carries profound significance within the realm of modern maritime technology and innovation. In an era where autonomous vessels navigate complex waterways, drones perform intricate inspections, and AI systems interpret vast datasets from the marine environment, understanding such foundational terms is not merely about lexicon; it is crucial for precision, safety, and the seamless integration of advanced technologies. The bow, a critical structural and functional component, serves as the leading edge through water, influencing everything from hydrodynamics to sensor placement for intelligent systems.
The Nautical Lexicon in an Age of Automation
As maritime operations become increasingly digitized and automated, the precise language of seafaring remains indispensable. For AI models, autonomous systems, and remote sensing platforms to effectively interact with and understand marine vessels, they must be trained on, and interpret, data that is accurately mapped to established nautical terminology. The distinction between the bow, stern, port, and starboard is not merely academic; it forms the bedrock for programming navigational algorithms, defining inspection parameters, and even for emergency response protocols.
Bridging Traditional Knowledge with AI and Robotics
The development of sophisticated AI and robotic systems for marine applications necessitates a harmonious blend of traditional nautical expertise with cutting-edge technological prowess. Consider an autonomous surface vessel (ASV) performing hydrographic surveys or environmental monitoring. Its programming relies on accurate references to vessel anatomy for path planning, obstacle detection, and data collection. If an ASV is instructed to approach a larger ship for data exchange or inspection, its AI must understand that “approaching the bow” means navigating to the forward-most section, where anchors are often located, or where specific sensors might be mounted. Misinterpretations, even of basic terms, could lead to inefficient operations, data inaccuracies, or, in critical scenarios, safety hazards. This interdisciplinary approach ensures that technological advancements enhance, rather than overwrite, centuries of accumulated maritime knowledge.
Precision in Data Annotation and Model Training
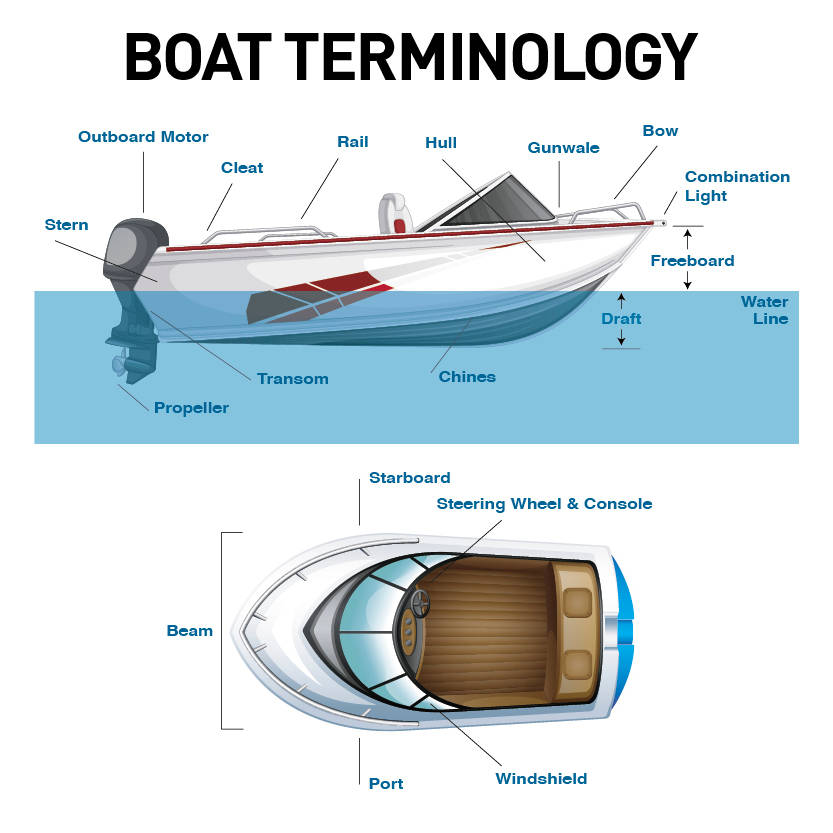
For machine learning models, particularly those involved in computer vision for maritime surveillance, navigation, or anomaly detection, accurate data annotation is paramount. When training an object recognition model to identify different types of vessels or their components, every image and video feed must be meticulously labeled. The bow of a vessel might contain specific features like a bulbous bow for hydrodynamic efficiency, a foredeck housing winches, or nav lights. These features must be correctly identified and categorized by human annotators before the data is fed into deep learning networks. An AI designed to detect anomalies on a vessel’s hull, for example, needs to be consistently taught where the “bow” begins and ends, enabling it to accurately localize defects or unauthorized boarding attempts in that specific region. This level of precision, starting from basic terminology, directly impacts the model’s accuracy, robustness, and ultimately, its utility in real-world applications like port security or offshore asset management.
Drone-Enabled Marine Inspection and Mapping
Drones, both aerial UAVs and underwater UUVs, are revolutionizing marine inspection and mapping. Their ability to access hard-to-reach areas, provide high-resolution visual data, and cover vast expanses efficiently makes them invaluable tools. However, the effectiveness of these drone operations is significantly amplified when integrated with a clear understanding of marine vessel anatomy, starting with the bow.
Visual Inspection: Identifying Key Structural Elements from Above
When a drone performs a hull inspection on a large cargo ship, operators or autonomous AI systems need to specify and understand which parts of the vessel are being examined. The bow, for instance, is frequently subjected to high stresses from wave impacts, making it prone to damage, fatigue, and corrosion. A drone equipped with high-resolution cameras or thermal sensors can meticulously scan this area. For an AI-driven inspection system to flag potential issues, it must accurately correlate visual data—such as rust spots, dents, or paint damage—with the specific structural element it’s observing, e.g., “a dent found on the starboard side of the bow, near the waterline.” Furthermore, the bow often houses critical equipment like anchor chains, hawsepipes, and mooring lines, all of which require regular inspection. Drones can provide overhead views to check the condition and proper stowage of these items, with operators using precise terminology to report findings.
Remote Sensing for Maritime Safety and Efficiency
Beyond direct visual inspection, drones equipped with LiDAR, multispectral, or hyperspectral sensors contribute significantly to marine mapping and remote sensing. When mapping a harbor or approaching a vessel for remote sensing tasks, knowing the bow’s orientation and features aids in mission planning and data interpretation. For instance, in an oil spill response scenario, drones might be used to map the extent of a spill around a damaged vessel. Understanding the vessel’s orientation, which way its bow is pointing, helps responders predict the spill’s trajectory and deploy containment booms more effectively. Similarly, for autonomous docking systems, understanding the bow’s approach path and specific dimensions is critical for safe maneuvering and collision avoidance, especially when integrating data from drone-mounted sensors providing real-time positional awareness relative to static and dynamic marine structures.
Autonomous Marine Systems and Navigational Intelligence
The development of fully autonomous marine systems, from self-navigating cargo ships to AI-powered patrol boats, represents a pinnacle of maritime innovation. These systems leverage advanced sensors, artificial intelligence, and sophisticated control algorithms to operate independently. For them, understanding vessel architecture, particularly the bow, is integral to safe and efficient operation.
AI-Driven Obstacle Avoidance and Path Planning Around Vessels
Autonomous navigation requires an intricate understanding of the surrounding environment, including other vessels. An AI system controlling an autonomous vessel must constantly process sensor data (radar, LiDAR, camera feeds) to identify, track, and predict the movement of other ships. When encountering another vessel, the AI needs to differentiate its bow from its stern to anticipate its direction of travel and apply the International Regulations for Preventing Collisions at Sea (COLREGs) rules appropriately. For example, if two power-driven vessels are meeting on reciprocal courses, Rule 14 dictates that “each shall alter her course to starboard so that each may pass on the port side of the other.” This rule is directly dependent on accurately identifying the bow of the approaching vessel. Furthermore, for close-quarters maneuvering or station-keeping near a stationary ship, the autonomous system must calculate safe distances, often referencing specific points like the bow or stern to ensure clear passage.
Understanding Vessel Anatomy for Collaborative Autonomous Operations
As the vision of smart ports and interconnected marine ecosystems takes shape, collaborative autonomous operations are becoming a reality. This involves multiple autonomous vessels, and potentially manned vessels, sharing data and coordinating movements. In such a scenario, a common, precise understanding of vessel components is vital. Imagine an autonomous tugboat being dispatched to assist a larger autonomous cargo ship entering a harbor. The tug’s AI needs to know exactly where to position itself relative to the cargo ship’s bow for effective pushing or pulling maneuvers. The communication protocol between these autonomous entities, or between a human operator and an autonomous vessel, would rely heavily on these established terms. Instructions like “position at the port quarter, pushing towards the bow” require the AI to interpret and execute actions based on a clear spatial understanding derived from fundamental vessel terminology.
The Bow: A Critical Area for Innovation and Analysis
Beyond its basic definition, the bow of a vessel is a focal point for much technological innovation. Its design and functionality significantly impact a ship’s performance, safety, and the integration of new technologies, making it a prime area for continuous research and development.
Hydrodynamic Design and Sensor Integration
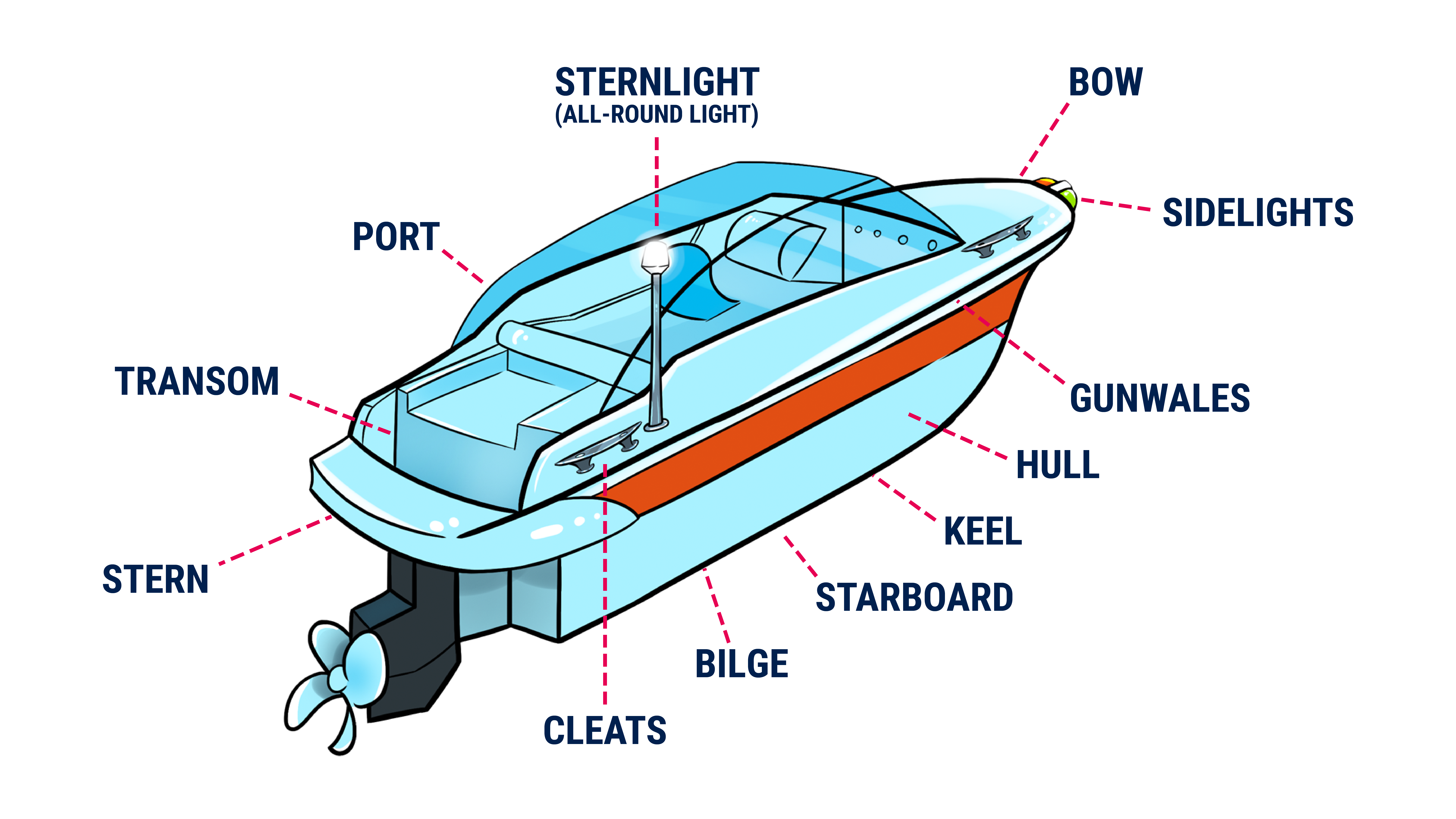
The shape of a vessel’s bow is meticulously engineered to optimize its interaction with water, influencing speed, fuel efficiency, and sea-keeping abilities. Innovations such as the bulbous bow, designed to reduce wave-making resistance, are products of extensive hydrodynamic research. For autonomous vessels, the bow is also an ideal location for the integration of various sensors crucial for navigation and situational awareness. Forward-looking sonar, radar arrays, LiDAR units, and cameras are frequently mounted on or within the bow structure to provide an unobstructed view of the path ahead. The precise placement and calibration of these sensors are critical for the accuracy of AI-driven perception systems, which rely on the integrity of the data collected from this leading edge. Designers of autonomous systems must consider not only the sensor’s field of view but also its protection from environmental factors and potential impact.
Mooring Operations and Autonomous Docking Challenges
The bow plays a central role in mooring and docking operations. Anchors, anchor chains, and mooring lines are primarily located at the forepart of the ship. The shift towards autonomous docking systems presents significant challenges and opportunities for innovation centered around the bow. These systems utilize a combination of GPS, LiDAR, computer vision, and potentially drone-derived real-time environmental data to guide a vessel precisely to its berth. AI algorithms must process complex data streams to account for wind, current, and the vessel’s inertia, making minute adjustments to propulsion and rudder angles. For successful autonomous mooring, the system must accurately locate the bow, deploy anchors or connect to mooring lines at precise points, and manage tension. Future innovations might include robotic systems on the bow capable of autonomously deploying and retrieving mooring lines or interacting with smart harbor infrastructure, further blurring the lines between traditional seamanship and advanced robotics. The bow, therefore, remains at the forefront of maritime technological advancement, continuously adapting to new demands for efficiency, safety, and autonomy.