The seemingly effortless ballet of a modern drone, hovering motionless against a breeze or executing a precise waypoint mission, is a testament to sophisticated engineering deeply rooted in a fundamental concept: the feedback loop. Far from a simple command-and-control system, advanced flight technology relies on a continuous cycle of sensing, processing, and acting, ensuring stability, accuracy, and responsiveness in real-time. Understanding the feedback loop is central to comprehending how drones achieve their remarkable capabilities in navigation, stabilization, and autonomous operation.
The Core Concept of Control Systems
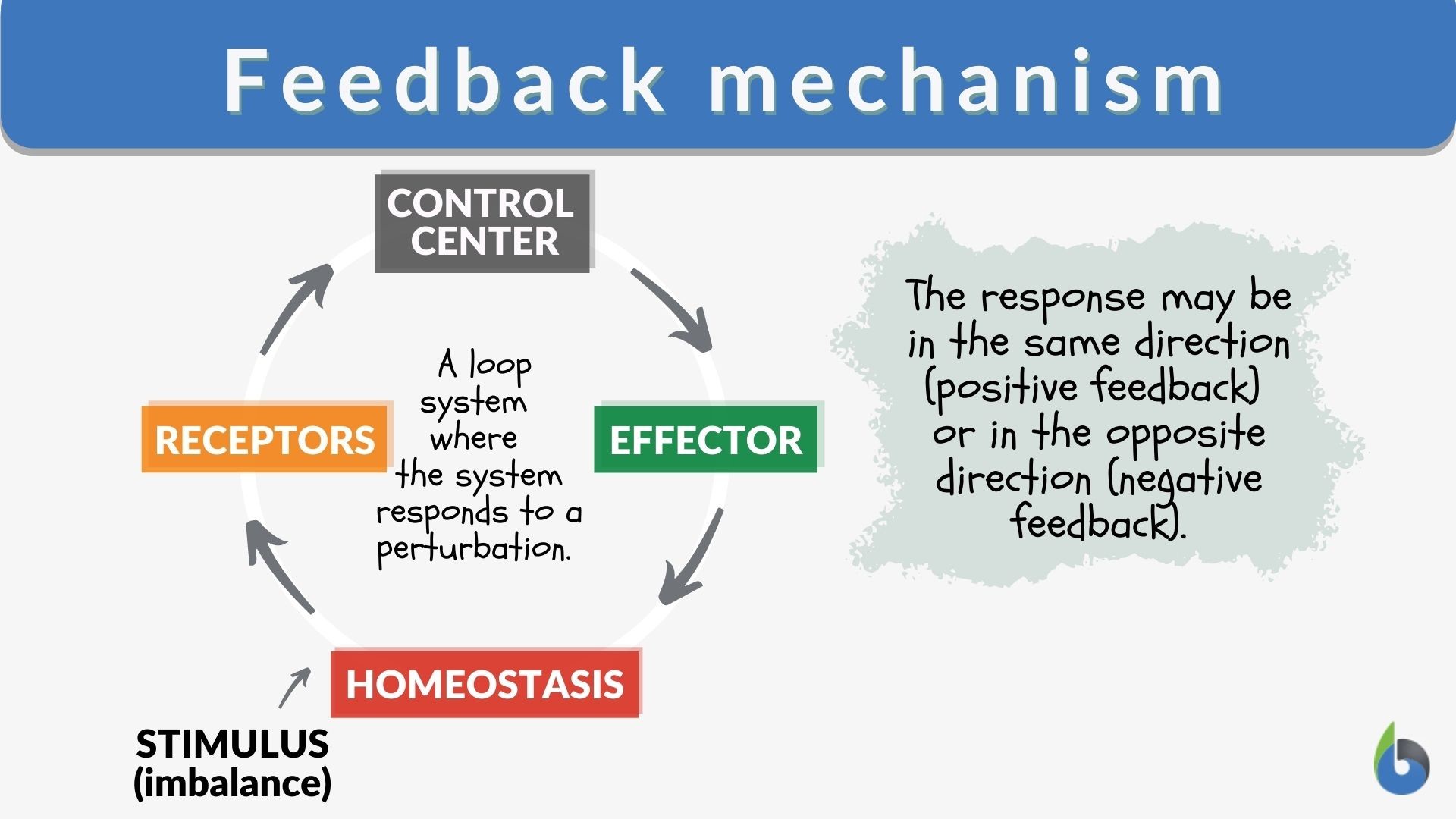
At its essence, a feedback loop is a mechanism that continuously monitors the output of a system and uses that information to adjust the input, thereby steering the system towards a desired state or setpoint. This constant self-correction is what differentiates sophisticated control systems from simpler, less adaptable ones.
Open-Loop vs. Closed-Loop Systems
To appreciate the power of feedback, it’s useful to contrast it with an open-loop system. In an open-loop system, the controller sends a command to an actuator, but there’s no mechanism to check if the desired outcome was achieved or if external factors interfered. For instance, a simple timer-based sprinkler system is open-loop; it turns on for a set duration regardless of soil moisture. While simple, these systems lack precision and resilience.
A closed-loop system, conversely, incorporates feedback. It constantly measures the actual output, compares it to the desired output (the setpoint), calculates the error, and then adjusts the input to minimize that error. Drone flight control is almost exclusively built on closed-loop principles. When a pilot commands a drone to hover, the flight controller continuously measures its actual position and orientation, identifies any deviation from the hover state, and issues corrective commands to the motors, all happening hundreds of times per second.
Components of a Feedback Loop
Every feedback loop, regardless of its specific application, comprises several key components working in concert:
- Setpoint (Desired State): This is the target value or condition the system aims to achieve. For a drone, this could be a specific altitude, a desired heading, or a stable hover.
- Process (Controlled System): This is the physical system being controlled, in our case, the drone itself, including its motors, propellers, and airframe dynamics.
- Sensor: This component measures the current actual state of the process. In drone flight, sensors like gyroscopes, accelerometers, GPS receivers, and barometers provide critical data about orientation, velocity, position, and altitude.
- Comparator: This part of the system takes the measured actual state from the sensor and compares it to the setpoint. The difference between these two values is known as the “error signal.”
- Controller: This is the “brain” of the loop. Based on the error signal, the controller calculates the necessary corrective action. PID (Proportional-Integral-Derivative) controllers are ubiquitous in drone flight systems due to their effectiveness in handling dynamic systems.
- Actuator: This component executes the corrective action determined by the controller. In drones, the electronic speed controllers (ESCs) and the motors they drive act as actuators, adjusting propeller thrust to change the drone’s attitude or position.
This continuous cycle—sense, compare, calculate, act—forms the bedrock of stable and controllable flight.
Feedback Loops in Drone Stabilization
Perhaps the most intuitive application of feedback loops in flight technology is maintaining drone stability. A drone is inherently an unstable platform; without constant intervention, it would quickly tumble out of the sky. Feedback loops are the unsung heroes keeping it level and responsive.
Gyroscopes and Accelerometers as Sensors
At the heart of a drone’s stabilization system are its Inertial Measurement Unit (IMU) sensors, primarily gyroscopes and accelerometers.
- Gyroscopes measure the rate of rotation around three axes (roll, pitch, yaw). If the drone starts to tilt (roll) to the left, the gyroscope detects this rotational velocity.
- Accelerometers measure linear acceleration and, crucially, can detect the direction of gravity, allowing the flight controller to determine the drone’s absolute orientation relative to the ground.
These sensors feed their data into the flight controller at incredibly high frequencies (often hundreds or thousands of times per second).
PID Controllers for Maintaining Attitude
The flight controller’s primary task for stabilization is to maintain a desired attitude (roll, pitch, and yaw angles). This is where PID controllers shine. A PID controller works by calculating an output value based on three parameters:
- Proportional (P): This term reacts to the current error. If the drone is tilted by 5 degrees, the P-term immediately applies a corrective force proportional to that 5-degree error.
- Integral (I): This term addresses accumulated error over time. If a constant small error persists (e.g., a slight drift due to unbalanced motors), the I-term slowly increases the corrective action to eliminate it.
- Derivative (D): This term anticipates future error based on the rate of change of the current error. If the drone is tilting rapidly, the D-term applies a counter-force to dampen the movement and prevent overshooting the target.
By finely tuning these P, I, and D gains, engineers can make a drone incredibly stable, smooth, and responsive, capable of resisting external disturbances like wind gusts with precision.
Dynamic Adjustments to Propeller Thrust
The output of the PID controller translates directly into commands for the drone’s motors. If the drone is pitching forward, the controller might instruct the rear motors to spin faster and the front motors slower, creating a torque that pitches the drone back to level. This dynamic adjustment of individual propeller thrusts is the actuator mechanism that continuously corrects for deviations in roll, pitch, and yaw, keeping the drone balanced and responsive to pilot input.
Navigation and Positional Control
Beyond mere stabilization, feedback loops are indispensable for navigating a drone through space and maintaining specific positions or trajectories.
GPS and Inertial Measurement Units (IMUs)
For positional awareness, GPS receivers are critical. They provide the drone’s absolute latitude, longitude, and altitude data. However, GPS signals can be slow to update and prone to inaccuracies, especially in urban canyons or under dense foliage. To overcome these limitations, GPS data is often fused with data from the IMU (accelerometers and gyroscopes) through techniques like Kalman filtering. The IMU provides high-frequency relative motion data, which is then periodically corrected and drift-compensated by the more accurate, but slower, GPS position fixes. This sensor fusion creates a much more robust and precise estimate of the drone’s position and velocity than either sensor could provide alone.
Waypoint Navigation and Route Following
Waypoint navigation is a prime example of a sophisticated feedback loop in action. A pilot or mission planner defines a series of geographical coordinates (waypoints) and potentially specific altitudes or actions for the drone to perform at each point. The drone’s flight controller then continuously measures its current GPS position and compares it to the target waypoint. The error signal (the distance and direction to the waypoint) is fed into the navigation controller, which calculates the necessary velocity and heading adjustments. This process repeats, guiding the drone along its prescribed path, dynamically correcting for wind or other disturbances to stay on course.
Altimeters and Barometers for Altitude Hold
Maintaining a constant altitude is crucial for many drone operations, from photography to surveying. While GPS can provide altitude data, barometers (pressure sensors) offer much higher precision for relative altitude changes and faster updates. A barometer measures atmospheric pressure, which decreases with increasing altitude. The drone’s flight controller uses this barometric data in a feedback loop: it compares the current barometric altitude to the desired altitude, calculates any error, and adjusts the thrust of all motors simultaneously to ascend or descend until the error is minimized, effectively “locking” the drone at a specific height. Ultrasonic or lidar altimeters can be added for very precise altitude hold close to the ground.
Obstacle Avoidance and Path Planning
As drones become more autonomous, the complexity and criticality of their feedback loops for perceiving and reacting to the environment increase dramatically. Obstacle avoidance is a prime example.
Vision Systems and Ultrasonic Sensors
Drones employ a variety of sensors for detecting obstacles:
- Vision Systems (Cameras): Stereo cameras or monocular cameras with AI object recognition can detect and map obstacles in 3D space. They provide rich contextual information.
- Ultrasonic Sensors (Sonars): These emit sound waves and measure the time it takes for the echo to return, calculating distance to nearby objects. They are effective for short-range detection.
- Lidar (Light Detection and Ranging): Lidar systems emit laser pulses and measure the return time, creating highly accurate 3D point clouds of the environment.
These sensors feed real-time environmental data into the drone’s perception system, which identifies potential collision threats.
Real-time Environment Mapping
For effective obstacle avoidance, the drone doesn’t just detect individual obstacles; it often constructs a real-time map of its immediate surroundings. This map, sometimes referred to as a “cost map” or “occupancy grid,” identifies areas that are clear and areas that are blocked. This dynamic environmental model is then used by the path planning algorithm.
Predictive Control and Evasive Maneuvers
With a current position, a desired destination, and a real-time map of obstacles, the drone’s flight controller can implement advanced feedback loops for obstacle avoidance. This often involves predictive control, where the system anticipates the drone’s trajectory and potential collisions. If a collision is predicted, the controller calculates an evasive maneuver—a slight deviation in altitude, a shift in horizontal position, or a change in speed—that allows the drone to safely bypass the obstacle while still progressing towards its overall goal. This is a complex, multi-layered feedback loop where the desired path itself becomes an adjustable setpoint, influenced by the environmental feedback.

The Future of Autonomous Flight Through Advanced Feedback
The evolution of flight technology is inextricably linked to the sophistication of its feedback loops. As AI and machine learning become more integrated into drone systems, feedback loops will move beyond precise numerical control to more adaptive, learning-based behaviors. AI follow modes, for instance, use visual feedback loops to track a subject, dynamically adjusting position and orientation to keep it in frame. Autonomous delivery drones will utilize complex feedback loops for precision landing, environmental awareness, and real-time route optimization. The continuous refinement of these feedback mechanisms promises even more intelligent, robust, and autonomous aerial platforms that can operate safely and efficiently in increasingly complex environments, fundamentally redefining what is possible in the skies.