The term “absolute difference” might sound like a purely mathematical concept, and indeed, it originates from arithmetic. However, within the realm of Flight Technology, understanding the absolute difference is crucial for the accurate and safe operation of a myriad of systems. It forms the bedrock of how our sophisticated aerial machines perceive, interpret, and interact with their environment, particularly when dealing with measurements and deviations. This article will delve into the fundamental meaning of absolute difference and explore its profound implications across various flight technology domains, from navigation and sensor data processing to stabilization and obstacle avoidance.

The Mathematical Foundation: Defining Absolute Difference
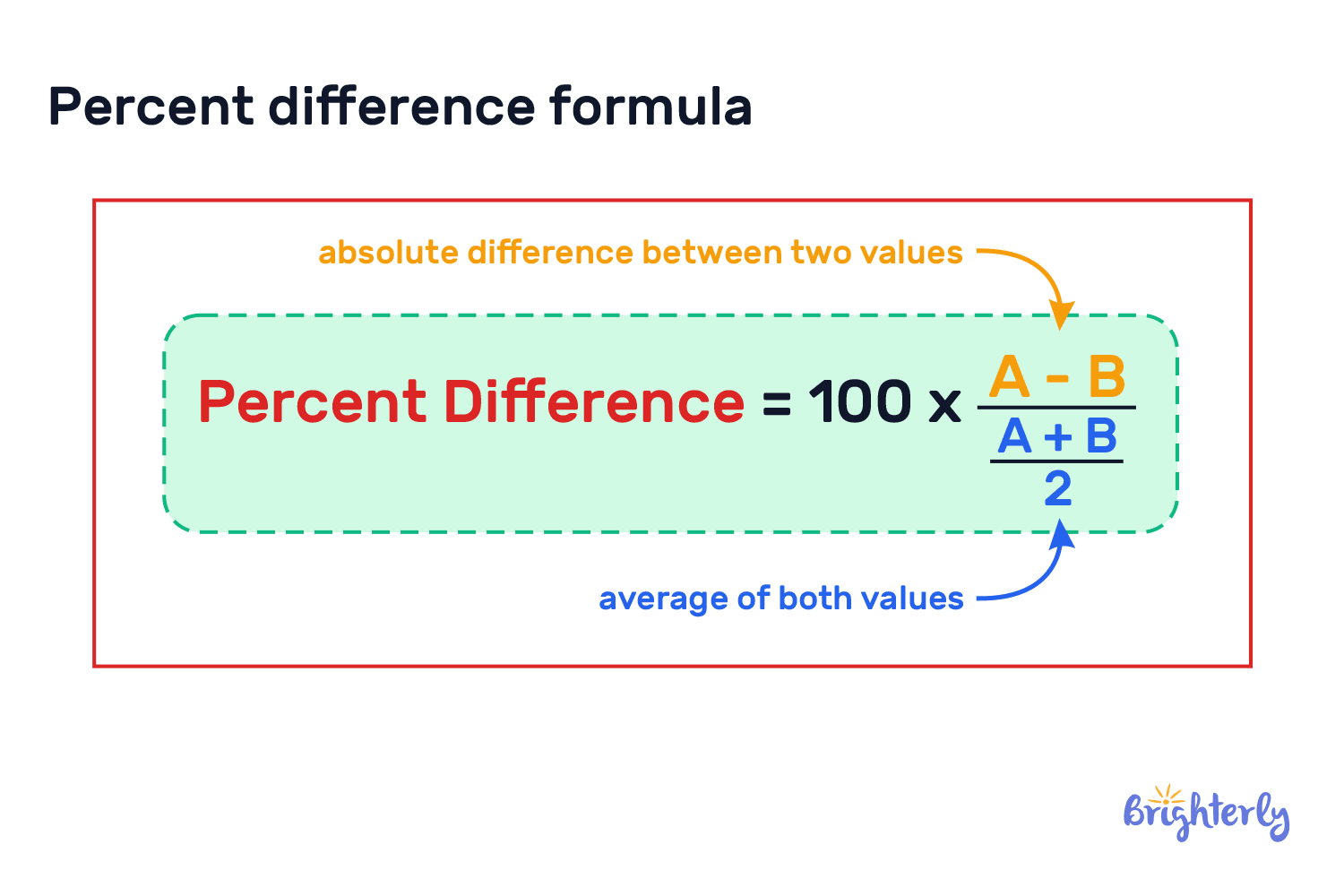
At its core, the absolute difference between two numbers is the distance between them on the number line, irrespective of their order. Mathematically, it is represented by the absolute value function, denoted by two vertical bars around the expression. For two numbers, a and b, the absolute difference is |a – b|.
For instance, the absolute difference between 10 and 5 is |10 – 5| = |5| = 5. The absolute difference between 5 and 10 is |5 – 10| = |-5| = 5. The result is always a non-negative value. This non-negativity is key: it signifies a magnitude, a pure measurement of separation, without directional bias.
In flight technology, we rarely deal with single, static measurements. Instead, we constantly process streams of data from various sensors. These data points represent physical quantities – altitude, velocity, acceleration, angular position, atmospheric pressure, and more. Each of these quantities can be measured and compared, and the absolute difference becomes a vital tool for analyzing discrepancies, errors, and deviations.
Error Analysis and Sensor Calibration
One of the most direct applications of absolute difference is in error analysis and sensor calibration. Sensors, by their very nature, are subject to noise, drift, and inaccuracies. To ensure reliable operation, these sensors must be calibrated against known, accurate references.
Consider a GPS receiver on an aircraft. Its reported position can be compared to a surveyed ground truth or a more accurate inertial navigation system (INS). The absolute difference between the GPS-reported altitude and the actual altitude provides a direct measure of the GPS error at that moment. By accumulating these absolute differences over time and across various conditions, engineers can quantify the sensor’s accuracy, identify biases, and implement correction algorithms.
Furthermore, in redundant systems, where multiple sensors measure the same parameter (e.g., multiple barometric altimeters), the absolute difference between their readings can be used to detect anomalies. If the absolute difference between two altimeters exceeds a predefined threshold, it might indicate a faulty sensor, triggering an alert or initiating a fallback to a more reliable sensor. This proactive detection of discrepancies is paramount for safety-critical systems in aviation.
Deviation from Target Values
In many flight operations, maintaining a specific trajectory, altitude, or speed is critical. This often involves comparing the current state of the aircraft to a desired or target state. The absolute difference quantifies the deviation from this target.
For example, in autopilot systems, the desired altitude is continuously compared to the aircraft’s current altitude. The absolute difference, often termed the “altitude error,” is fed into control algorithms that adjust the aircraft’s pitch to minimize this error. Similarly, in cruise control for speed, the absolute difference between the set speed and the actual speed drives adjustments to engine power.
This concept extends to more complex maneuvers. In precision landing systems, the aircraft’s position relative to the runway centerline is constantly monitored. The absolute difference in lateral and longitudinal position from the ideal landing path determines the necessary control inputs to guide the aircraft accurately. Without the ability to quantify and minimize these absolute differences, achieving precise flight path adherence would be impossible.
Applications in Flight Control and Stabilization
Flight control systems are intricately designed to maintain stability and respond to pilot inputs or autonomous commands. The absolute difference plays a subtle yet crucial role in their operation, particularly in systems that manage attitude and position.
Gyroscopic Stabilization and Inertial Measurement Units (IMUs)
Modern aircraft, including drones, rely heavily on Inertial Measurement Units (IMUs) which typically comprise accelerometers and gyroscopes. These sensors measure angular rates and linear accelerations. When an aircraft experiences an external disturbance – a gust of wind, for example – the gyroscopes detect the resulting angular velocity.
The flight control system compares the measured angular velocity to a zero-rate target (meaning no rotation). The absolute difference between the current angular rate and the zero-rate target is a measure of the disturbance’s effect on the aircraft’s attitude. This absolute difference, interpreted by the control algorithms, then dictates corrective control surface or motor adjustments to counteract the rotation and restore the desired attitude.
Similarly, accelerometers in an IMU can detect deviations from a stable gravitational vector. If the aircraft pitches or rolls unexpectedly, the accelerometers will register changes in acceleration. Comparing these measured accelerations to what would be expected in a stable state, the absolute difference highlights the magnitude of the attitude change. This information is then used to stabilize the platform, keeping it level or oriented as intended.
Maintaining Position and Altitude
Beyond attitude control, flight systems are tasked with maintaining precise position and altitude. This is where GPS, barometric altimeters, and other sensors come into play. As discussed earlier, the absolute difference between the desired altitude and the actual altitude drives pitch control for vertical stabilization.
However, when considering horizontal positioning, the concept becomes more nuanced. For autonomous drones performing tasks like surveying or surveillance, maintaining a fixed GPS waypoint is essential. The absolute difference between the current GPS coordinates and the target coordinates, projected onto the horizontal plane, provides the distance and direction of drift. This “position error” is then used to command directional thrust adjustments to steer the drone back to its intended location.
In more advanced scenarios, such as formation flying, the absolute difference in position and relative velocity between multiple aircraft is critical. Each aircraft needs to maintain a specific spacing and relative movement vector from its neighbors. The absolute difference calculation ensures that these formations are held accurately, preventing collisions and maintaining operational efficiency.
Navigation and Trajectory Following
Navigation systems are the eyes and navigational charts of any aircraft. They determine the aircraft’s current position and chart a course to its destination. The absolute difference is fundamental to how these systems function and how aircraft follow programmed flight paths.
Waypoint Navigation
The most basic form of programmed flight involves following a series of waypoints. Each waypoint represents a specific geographic coordinate. As the aircraft flies, its navigation system continuously calculates the absolute difference between its current position and the next waypoint in the sequence.
This “distance to waypoint” is a direct application of the absolute difference, usually calculated using the Haversine formula for spherical distances on Earth. This value is not just an indicator; it’s a primary input for the autopilot or flight director. The autopilot will steer the aircraft such that this absolute difference is minimized, effectively guiding the aircraft from one point to the next.
Error Correction and Dead Reckoning
Even with advanced navigation aids like GPS, errors can occur. When GPS signals are lost or unreliable (e.g., in canyons, dense urban environments, or during solar flares), aircraft must rely on alternative navigation methods like dead reckoning.
Dead reckoning estimates the current position based on a previously known position, course, speed, and elapsed time. However, cumulative errors in estimating speed and direction can lead to significant deviations. The absolute difference between the dead-reckoned position and a periodically available true position (from a celestial fix or a brief GPS reacquisition) helps to identify and correct these accumulated errors.
Precision Approach and Landing
The final stages of flight, particularly precision approaches and landings, demand the highest levels of accuracy. Systems like Instrument Landing Systems (ILS) and GPS-based approaches rely on comparing the aircraft’s current trajectory to a defined glide path.
The ILS provides guidance signals that indicate the aircraft’s lateral and vertical deviation from the centerline and glide slope. These deviations are, in essence, measures of absolute difference. The cockpit displays translate these differences into visual cues for the pilot or directly into control commands for the autopilot. Similarly, GPS-guided landings utilize the absolute difference between the aircraft’s actual position and the precise coordinates of the runway threshold and centerline to execute a safe touchdown.
Sensor Fusion and Data Integration
In complex flight technology systems, no single sensor provides all the necessary information. Instead, data from multiple, disparate sensors are fused and integrated to create a more comprehensive and accurate understanding of the environment and the aircraft’s state. The absolute difference plays a vital role in ensuring the coherence and reliability of this fused data.
Cross-Validation of Sensor Data
When multiple sensors measure the same or related parameters, their readings are often compared. For instance, an aircraft might have both a GPS and an INS. The INS provides high-frequency, short-term accurate measurements of position and attitude, while GPS provides lower-frequency, long-term absolute position.
The absolute difference between the position derived from the INS and the position reported by the GPS is a critical metric. If this absolute difference grows beyond a certain threshold, it indicates that either the INS is drifting significantly, or the GPS is experiencing an anomaly. This triggers algorithms to adjust the weighting of each sensor’s input in the fused output or to flag one of the sensors for potential maintenance.
Kalman Filtering and State Estimation
Advanced algorithms like the Kalman filter are widely used for sensor fusion and state estimation in flight technology. The Kalman filter is an optimal recursive data processing algorithm that estimates the state of a dynamic system from a series of noisy measurements.
A key component in the Kalman filter’s operation is the comparison of predicted states with actual measurements. The innovation, or residual, in a Kalman filter is essentially the absolute difference between the predicted measurement (based on the system’s dynamic model) and the actual measurement received from a sensor. This innovation is used to update the state estimate and refine the covariance matrix, which represents the uncertainty in the estimate. By minimizing the impact of large absolute differences (large innovations), the Kalman filter ensures a robust and accurate state estimation even in the presence of significant sensor noise or temporary sensor failures.

Anomaly Detection and System Health Monitoring
The absolute difference is a powerful tool for detecting anomalies in system behavior. By monitoring the absolute difference between expected sensor outputs and actual outputs, or between redundant sensor readings, engineers can identify deviations that might indicate a developing fault.
For example, if the absolute difference between the commanded motor speed of a drone and its actual measured speed exceeds a predefined tolerance, it might signal a motor issue, a propeller problem, or a control system malfunction. Early detection of such anomalies, often based on analyzing the magnitude and persistence of absolute differences, is crucial for predictive maintenance and preventing catastrophic failures.
In conclusion, the seemingly simple mathematical concept of absolute difference is a foundational element woven into the fabric of modern flight technology. From the fundamental calibration of sensors and the precise control of flight surfaces to the sophisticated fusion of data from multiple sources and the safe navigation through complex airspace, the ability to quantify and manage deviations—the absolute difference—is indispensable for ensuring the accuracy, reliability, and safety of aerial vehicles.