Understanding Uncertainty in Advanced Drone Systems
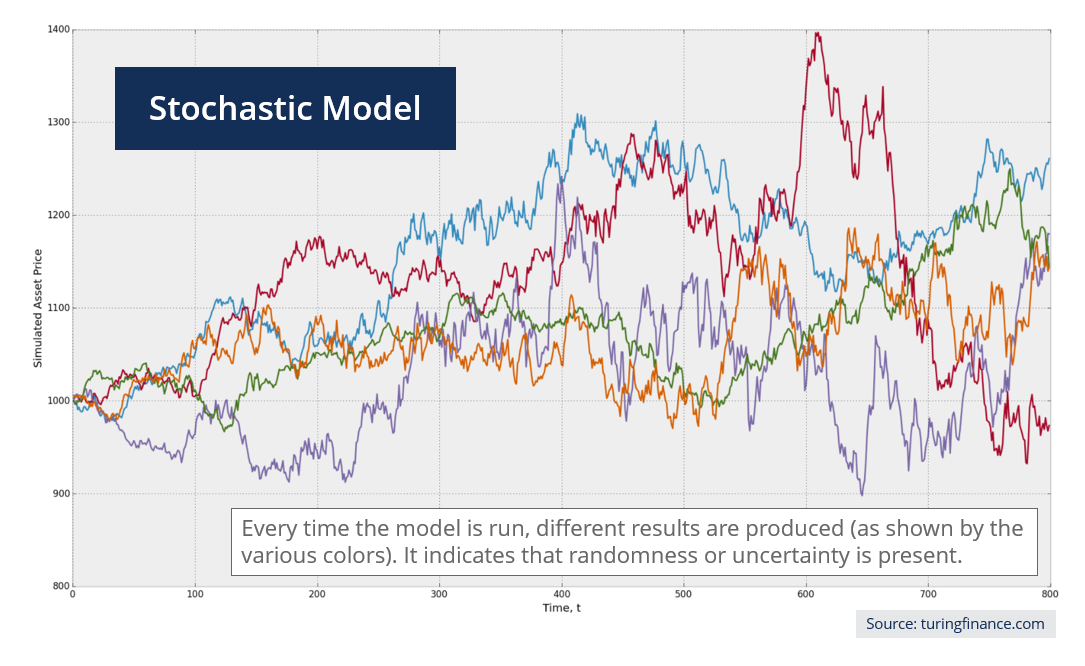
Stochastic modeling is a sophisticated mathematical framework used to analyze and predict the behavior of systems that involve inherent randomness or unpredictability. Unlike deterministic models, which assume that future states can be precisely determined from current ones, stochastic models acknowledge and quantify uncertainty. In the realm of cutting-edge drone technology, where autonomous operation, environmental variability, and complex sensor data are norms, understanding and managing this uncertainty is not just beneficial—it’s critical. From the minute fluctuations in GPS signals to the unpredictable gusts of wind affecting a drone’s flight path, or the nuanced interpretations of remote sensing data, stochastic modeling provides the tools to build more robust, reliable, and intelligent unmanned aerial vehicles (UAVs). It allows engineers and data scientists to move beyond simple averages, incorporating probability distributions and random variables to paint a more realistic picture of system performance and environmental interactions. This foundational understanding is pivotal for developing the next generation of AI-powered drones capable of intricate tasks and operating in dynamic, real-world conditions with unprecedented levels of autonomy and safety.
The Core Principles of Stochastic Processes
At its heart, stochastic modeling relies on the concept of a stochastic process, which is a collection of random variables indexed by time or space. Imagine tracking a drone’s position: while a deterministic model might predict a single, exact location at a future time, a stochastic model would provide a probability distribution of possible locations, reflecting the accumulated errors from sensors, control inputs, and environmental disturbances. Key components of these models often include Markov chains, where the future state depends only on the current state (a common simplification in many sequential decision-making processes for autonomous systems), and Poisson processes, useful for modeling the arrival of events like sensor anomalies or data packets. Brownian motion, or Wiener processes, are invaluable for representing continuous random movements, such as the inherent noise in sensor readings over time. By carefully selecting and applying these various mathematical constructs, engineers can simulate complex scenarios, evaluate potential risks, and optimize drone performance across a spectrum of operational conditions. This allows for a deeper insight into system behavior than traditional deterministic approaches, fostering innovation in areas like predictive control and robust path planning.
Enabling Autonomous Flight and AI-Powered Navigation
The promise of truly autonomous drones hinges significantly on their ability to navigate complex, changing environments without human intervention. This capability is deeply intertwined with stochastic modeling. For AI follow mode, autonomous delivery, or sophisticated inspection missions, drones must constantly estimate their position, predict the movement of dynamic obstacles, and make intelligent decisions in real-time, often under conditions of incomplete or noisy information.
Robust Path Planning and Obstacle Avoidance
In autonomous flight, a drone’s path planning algorithm needs to do more than just find the shortest route; it must find the safest and most probable successful route, accounting for uncertainties. Stochastic models come into play by quantifying the probability of collision with dynamic obstacles, considering the uncertainty in both the drone’s future position and the obstacle’s future trajectory. Techniques like Monte Carlo simulations, driven by stochastic models, can generate thousands of possible flight scenarios, allowing the drone’s AI to assess risks and compute optimal evasive maneuvers or more resilient flight paths. This approach moves beyond simply reacting to perceived threats, enabling predictive avoidance based on probabilistic outcomes. For instance, when navigating through a crowded airspace or an urban canyon, the drone’s system can continuously update its probabilistic map of potential hazards, ensuring robust decision-making even when sensor data is ambiguous or incomplete.
Sensor Fusion and State Estimation
Drones rely on a multitude of sensors—GPS, IMUs (Inertial Measurement Units), LiDAR, cameras, ultrasonic sensors—each providing data with its own inherent noise and biases. Stochastic modeling is fundamental to sensor fusion, the process of combining data from multiple sensors to achieve a more accurate and reliable estimate of the drone’s state (position, velocity, orientation). The Extended Kalman Filter (EKF) and Unscented Kalman Filter (UKF), both classic examples of stochastic state estimators, are widely used in drone navigation. These filters continuously refine the drone’s estimated state by incorporating new sensor measurements and applying probabilistic models of measurement noise and system dynamics. More advanced techniques like Particle Filters (also known as Sequential Monte Carlo methods) offer even greater flexibility for non-linear systems and non-Gaussian noise, allowing for even more precise and resilient navigation in highly dynamic or GPS-denied environments. By understanding and modeling the stochastic nature of sensor errors, drones can maintain accurate self-awareness, which is paramount for all autonomous functions.
Advancing Mapping and Remote Sensing with Probabilistic Insights
Drones are revolutionizing mapping, surveying, and remote sensing by providing high-resolution aerial data more efficiently and safely than traditional methods. However, the raw data collected often contains noise, gaps, and ambiguities that require sophisticated processing. Stochastic modeling offers powerful tools to transform this raw, uncertain data into actionable, high-fidelity insights.
Data Quality Improvement and Gap Filling
In mapping missions, environmental factors like atmospheric conditions, varying light, or occlusion by terrain can introduce noise or create gaps in the collected data. Stochastic models can be employed to statistically characterize this noise and develop algorithms for its reduction, leading to clearer and more accurate maps. For instance, when building 3D point clouds from LiDAR or photogrammetry data, stochastic methods help in identifying and removing outliers while simultaneously inferring missing data points based on the probabilistic relationships of surrounding data. Gaussian Process Regression, a non-parametric Bayesian approach, is particularly effective here, allowing for robust interpolation and extrapolation of spatial data, effectively “filling in” missing terrain or feature details with a measure of confidence. This ensures that the generated maps are not only visually appealing but also statistically sound for critical applications such as construction, agriculture, or environmental monitoring.
Predictive Modeling for Environmental Monitoring
Remote sensing drones collect vast amounts of data—from crop health indices in agriculture to temperature profiles for environmental studies or structural integrity in infrastructure inspection. Stochastic models enable the extraction of meaningful patterns and the development of predictive capabilities from this complex data. For example, in precision agriculture, stochastic models can analyze variations in multispectral imagery over time to predict crop yield, identify disease outbreaks early, or optimize irrigation schedules, accounting for inherent variability in soil, weather, and plant growth. Similarly, for environmental monitoring, these models can track the spread of pollutants, forecast changes in ecosystem health, or predict natural disaster impacts (like flood propagation), by integrating diverse datasets with their associated uncertainties. This moves beyond mere observation to proactive management and intervention, powered by probabilistic forecasting.
Enhancing Reliability and Predictive Maintenance
The continuous operation of drone fleets, especially in commercial and industrial applications, demands high levels of reliability and availability. Stochastic modeling provides a framework to predict component failures, optimize maintenance schedules, and assess the overall system lifespan, thereby significantly reducing operational costs and improving safety.
Component Lifetime Prediction and Failure Analysis
Every component in a drone – from motors and batteries to sensors and flight controllers – has a finite lifespan and a probability of failure. Stochastic models, particularly those based on reliability theory and survival analysis, are used to model these probabilities. By analyzing historical failure data and operational stressors (e.g., flight hours, temperature cycles, vibration levels), engineers can develop stochastic models to predict when a specific component is likely to fail. This allows for scheduled preventative maintenance or replacement before a catastrophic failure occurs, preventing costly downtime or accidents. For instance, a drone battery’s degradation can be modeled stochastically, allowing operators to predict its remaining useful life with a certain confidence interval, optimizing its replacement schedule.
System-Level Reliability and Risk Assessment
Beyond individual components, stochastic modeling is crucial for assessing the overall reliability of complex drone systems. By integrating the failure probabilities of various subsystems and their interdependencies, comprehensive system reliability models can be built. These models can simulate various operational scenarios and identify critical failure points or common-mode failures. This informs design improvements, redundancy strategies, and operational protocols. Furthermore, for autonomous missions in sensitive areas, stochastic risk assessment models can quantify the probability of mission success or failure, considering environmental uncertainties, potential equipment malfunctions, and communication link stability. This provides operators and regulators with a data-driven basis for approving and managing increasingly complex drone operations.
The Future Landscape: Complex Adaptive Systems and Swarm Intelligence
As drone technology continues to evolve, pushing towards more sophisticated autonomous behaviors and multi-drone operations, stochastic modeling will become even more indispensable. It underpins the understanding and control of inherently complex adaptive systems and the emergent behaviors of drone swarms.
Modeling Swarm Dynamics and Collaborative Autonomy
The development of drone swarms, capable of performing complex tasks collaboratively, represents a significant leap in drone innovation. The behavior of individual drones in a swarm, and their interactions, are often non-deterministic and influenced by local environmental factors, communication latencies, and the actions of other agents. Stochastic models are essential for understanding and predicting the emergent behaviors of such swarms. They help design robust communication protocols that account for packet loss, develop coordination algorithms that tolerate individual drone failures, and optimize collective decision-making processes under uncertainty. By modeling the probabilistic interactions within a swarm, engineers can simulate and refine swarm intelligence algorithms, ensuring that the collective system can achieve its objectives efficiently and reliably, even when faced with unexpected events or partial information.

Learning and Adaptation in Unpredictable Environments
The ultimate goal for many advanced drone applications is the ability to learn and adapt autonomously in previously unseen or rapidly changing environments. This capacity for intelligent adaptation is heavily reliant on principles from stochastic control and reinforcement learning. Stochastic processes provide the framework for defining the environment, the drone’s actions, and the probabilistic outcomes of those actions. Algorithms can then learn optimal policies by exploring different behaviors and evaluating their effectiveness in a stochastic world. Whether it’s a drone learning to navigate a cluttered indoor environment with unknown obstacles or adapting its flight parameters to sudden changes in wind patterns, stochastic modeling provides the mathematical backbone for these learning processes, enabling drones to become truly intelligent, resilient, and adaptable entities in an increasingly complex and unpredictable world.