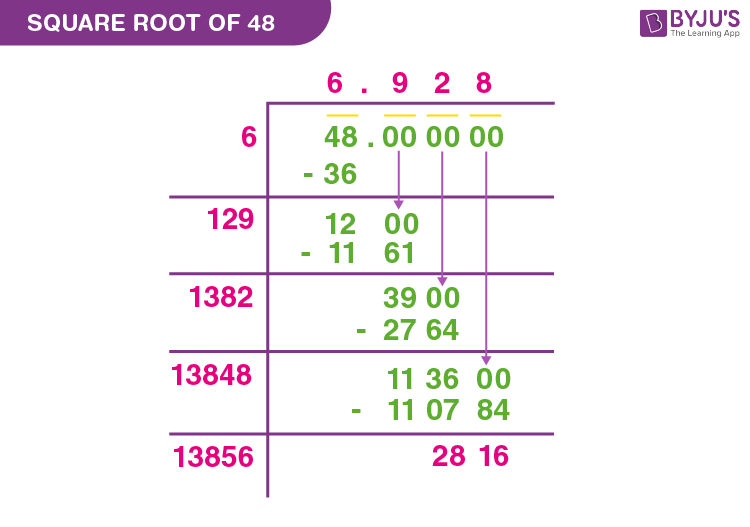
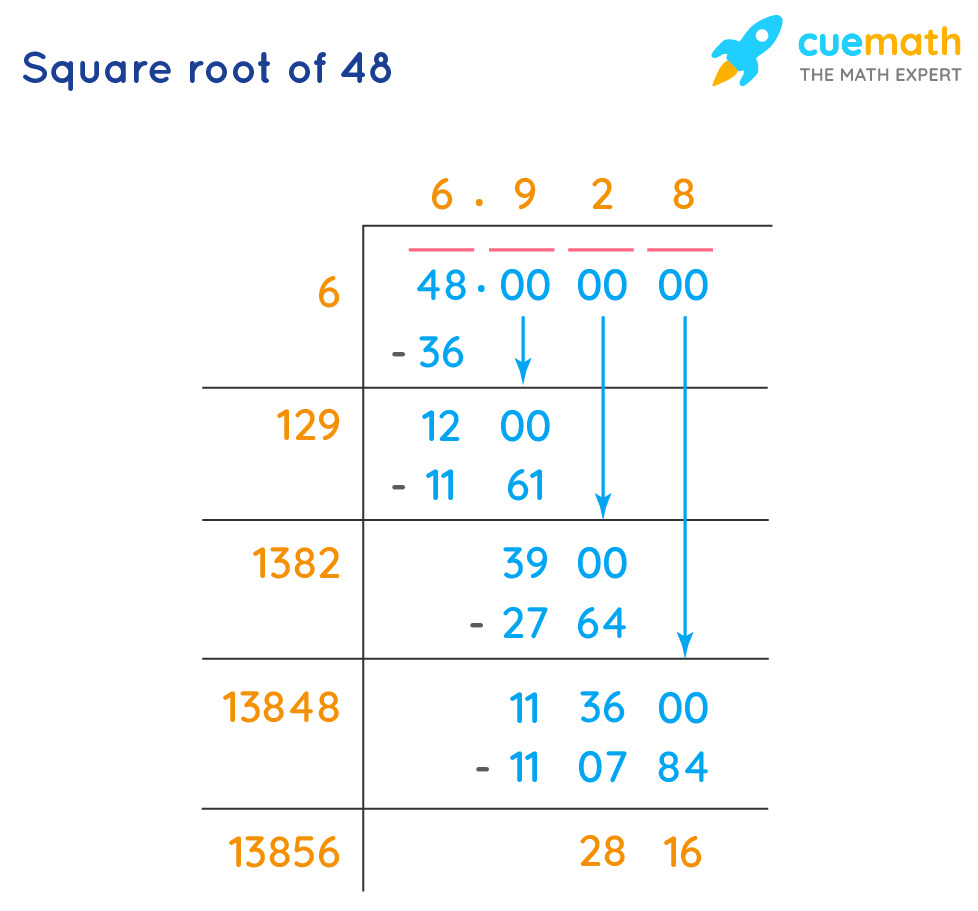
At first glance, the question “What is the square root of 48?” might seem purely academic, a query for a mathematics textbook rather than a discussion on advanced flight technology. Yet, within the intricate world of drones – from their precise navigation to their steadfast stabilization – fundamental mathematical operations like square roots are not just theoretical concepts; they are the bedrock upon which aerial innovation is built. The square root of 48, approximately 6.928, serves as a potent symbol for the myriad of calculations constantly performed in the background of every autonomous flight, every stable hover, and every obstacle avoided. It represents the inherent precision and computational depth required to elevate a collection of hardware into a sophisticated flying machine. This article delves into how such foundational mathematical concepts underpin the most critical aspects of modern drone flight technology, transforming raw sensor data into actionable intelligence for seamless aerial operations.
The Unseen Mathematical Engine of Flight Technology
The ability of a drone to fly stably, navigate accurately, and perform complex tasks is not simply a matter of powerful motors and sleek design. It is fundamentally driven by an unseen mathematical engine, a relentless series of computations that interpret the physical world and translate it into control commands. Every microsecond, the drone’s flight controller processes a deluge of data, and within this processing, basic mathematical operations, including square roots, play indispensable roles. These aren’t just abstract numbers; they represent critical magnitudes, distances, and statistical measures that dictate the drone’s understanding of its own state and its environment. The exactness of these calculations, whether it’s 6.928 or any other precise value, is paramount; a small error can lead to significant deviations in flight performance, highlighting the non-negotiable demand for computational accuracy in aerospace.
Precision in Navigation and Position Estimation
Accurate navigation is the cornerstone of any effective flight technology. Drones rely on a sophisticated interplay of sensors and algorithms to determine their precise location, velocity, and orientation in three-dimensional space. One of the most common applications where square roots emerge is in the calculation of Euclidean distances. When a drone uses GPS, it receives satellite signals that translate into coordinates. To determine the distance flown between two points, or the distance to a target waypoint, the Pythagorean theorem is frequently applied in 3D, which inherently involves squaring differences in coordinates and then taking the square root of their sum.
Beyond GPS, Inertial Measurement Units (IMUs) comprising accelerometers and gyroscopes provide crucial data on the drone’s translational and angular motion. While raw IMU data is noisy and prone to drift, advanced sensor fusion algorithms, such as Kalman filters, integrate this information with other sensor inputs (e.g., barometers for altitude, magnetometers for heading) to provide a more robust and accurate estimation of the drone’s state. Within these filters, statistical measures like standard deviation and variance, which quantify the uncertainty of estimates, are critical for weighting sensor inputs correctly. The standard deviation, a key component of statistical analysis, is by definition the square root of the variance. Thus, the confidence a drone has in its own position estimate is constantly being refined through calculations involving square roots, ensuring optimal decision-making for path planning and flight execution.
Stabilizing the Unstable: The Role of Control Systems
A multirotor drone is an inherently unstable platform; without continuous active control, it would immediately tumble out of the sky. The magic of stable flight lies in its control systems, primarily PID (Proportional-Integral-Derivative) controllers, which continuously adjust motor thrusts to counteract disturbances and maintain desired attitudes. These controllers work by calculating the “error” – the difference between the desired state (e.g., level flight) and the current measured state (e.g., tilted by 5 degrees). The magnitude of this error, and how it changes over time, determines the control response. While PID controllers primarily involve proportional, integral, and derivative terms, more advanced control theories, especially those dealing with complex dynamics and adaptive control, can incorporate vector magnitudes or energy calculations where square roots are fundamental.
Furthermore, maintaining a precise attitude (roll, pitch, yaw) requires constant calculation of angular rates and orientations, often represented using quaternions or rotation matrices. The transformation and normalization of these mathematical constructs can involve square roots to ensure consistency and prevent computational drift. The flight controller’s ability to precisely damp vibrations, respond to wind gusts, and maintain a silky-smooth trajectory relies on rapid, accurate calculations that convert sensor feedback into stable, predictable motion. Without the computational grunt to perform these fundamental mathematical operations with unwavering precision, the intricate ballet of a drone in flight would be impossible.
Real-Time Data Processing and Algorithmic Intelligence
The utility of drones extends far beyond simple flight. Modern UAVs are intelligent platforms capable of performing complex tasks like autonomous navigation, sophisticated obstacle avoidance, and advanced mapping. Each of these capabilities is built upon layers of real-time data processing and algorithmic intelligence, where fundamental mathematical operations continue to play a critical role, transforming raw data streams into actionable insights. The computational challenge lies in executing these complex calculations instantaneously, allowing the drone to react and adapt within milliseconds.
Obstacle Avoidance and Trajectory Planning
For a drone to safely navigate cluttered environments or avoid unexpected objects, it must possess robust obstacle avoidance capabilities. This involves gathering distance information from various sensors—ultrasonic, lidar, stereo vision, or even monocular cameras. Once distances to potential obstacles are measured, the drone’s flight technology must calculate the precise position of these obstacles relative to itself. This often involves converting sensor readings into 3D coordinates, a process that can involve trigonometric functions and, crucially, Euclidean distance calculations that leverage square roots.
Furthermore, dynamic obstacle avoidance requires predicting the trajectory of both the drone and any moving obstacles. Calculating relative velocities and collision probabilities involves vector mathematics, where the magnitude of a vector (its length or speed) is determined by taking the square root of the sum of the squares of its components. The drone’s algorithms then use these precise mathematical results to re-plan its trajectory in real-time, identifying the safest path and adjusting its flight parameters instantaneously. Without the ability to perform these magnitude and distance calculations with high fidelity, the drone’s perception of its environment would be fuzzy, rendering reliable obstacle avoidance impossible.
Autonomous Flight Modes and Spatial Intelligence
Advanced autonomous flight modes, such as “AI Follow,” “Waypoint Navigation,” or “Terrain Following,” rely on a sophisticated understanding of spatial relationships. In an AI Follow mode, for instance, the drone must continuously calculate its relative position and velocity concerning the subject it is tracking. This involves tracking the subject’s coordinates and calculating the 3D distance between the drone and the subject, again utilizing square root operations. The drone then predicts the subject’s future movement based on its current velocity and acceleration vectors, ensuring it maintains optimal distance and framing, all underpinned by continuous mathematical modeling.
For mapping and remote sensing applications, drones capture vast amounts of imagery and other data. Processing this data to create accurate 3D models, orthomosaic maps, or digital elevation models requires sophisticated photogrammetry and computer vision algorithms. These algorithms perform complex geometric calculations, feature matching, and triangulation, where precise distance and error calculations (often involving square roots for magnitude or standard deviation) are essential for generating high-fidelity spatial intelligence. The transformation of individual images into a coherent, spatially accurate representation of the environment is a testament to the power of these underlying mathematical principles.
Engineering for Robustness, Reliability, and Efficiency
The design and implementation of drone flight technology demand not only computational power but also an unwavering focus on robustness, reliability, and efficiency. Every mathematical operation, from a simple addition to a complex square root, must be executed flawlessly, often under extreme real-time constraints, to ensure the drone performs consistently and safely in diverse conditions.
Redundancy and Error Compensation
Modern flight controllers often employ redundant sensors and complex error-checking mechanisms to enhance reliability. Mathematical models are critical in this regard, identifying discrepancies between sensor readings, determining which data sources are most trustworthy, and compensating for sensor biases or failures. For instance, in a sensor fusion framework, the uncertainty associated with each sensor reading (quantified by its variance or standard deviation, which involves square roots) is used to weight its contribution to the overall state estimate. If a sensor begins to provide wildly inaccurate data, its associated uncertainty will increase, diminishing its influence on the overall calculation and allowing the system to continue operating using more reliable inputs. This sophisticated error management system is entirely reliant on precise mathematical computations to maintain integrity and prevent catastrophic failures.
Computational Efficiency on Embedded Systems
The highly constrained environment of a drone—limited power, size, and weight—places a premium on computational efficiency. While the concept of a square root might seem trivial on a powerful desktop computer, performing thousands of these operations per second on an embedded flight controller requires highly optimized algorithms. Engineers dedicate significant effort to developing efficient numerical methods and hardware accelerators to ensure that critical calculations, including square roots, are executed within the tight real-time deadlines without consuming excessive power or generating undue heat. The optimization of these fundamental operations allows for more sophisticated algorithms to run concurrently, pushing the boundaries of what autonomous drones can achieve while maintaining acceptable flight endurance.

Power Management and Flight Envelope Optimization
Beyond raw flight stability, intelligent power management and flight envelope optimization are crucial for maximizing mission duration and safety. Algorithms calculate the most energy-efficient flight paths, considering factors like wind conditions, payload weight, and desired speed. These optimization problems frequently involve multi-variable equations and constraint satisfaction, where the “cost” or “benefit” of different maneuvers might be determined by vector magnitudes (involving square roots) representing energy expenditure or flight time. Similarly, managing the drone’s flight envelope—the safe operating limits for speed, altitude, and maneuverability—relies on mathematical models that continuously assess the drone’s current state against its capabilities, ensuring it always operates within safe parameters. Every calculation, from determining the thrust required for a specific maneuver to predicting remaining flight time, contributes to a safer, more efficient, and ultimately more capable aerial platform.