When we delve into the world of flight technology, particularly concerning the precise control and navigation of aerial vehicles, a foundational mathematical concept emerges as surprisingly relevant: SOHCAHTOA. While it might conjure memories of high school trigonometry classes, its principles are fundamental to understanding and implementing the complex systems that keep drones stable, accurately positioned, and capable of executing intricate maneuvers. SOHCAHTOA, a mnemonic for sine, cosine, and tangent, provides the essential framework for breaking down angles and distances, which are critical for everything from sensor data interpretation to attitude stabilization.
Understanding the Trigonometric Fundamentals
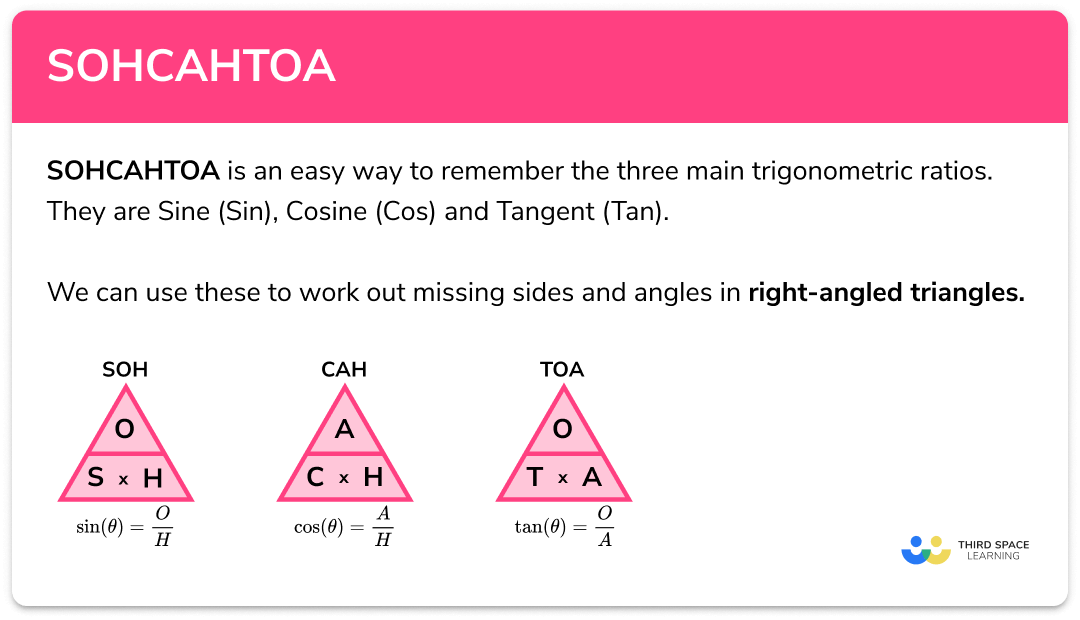
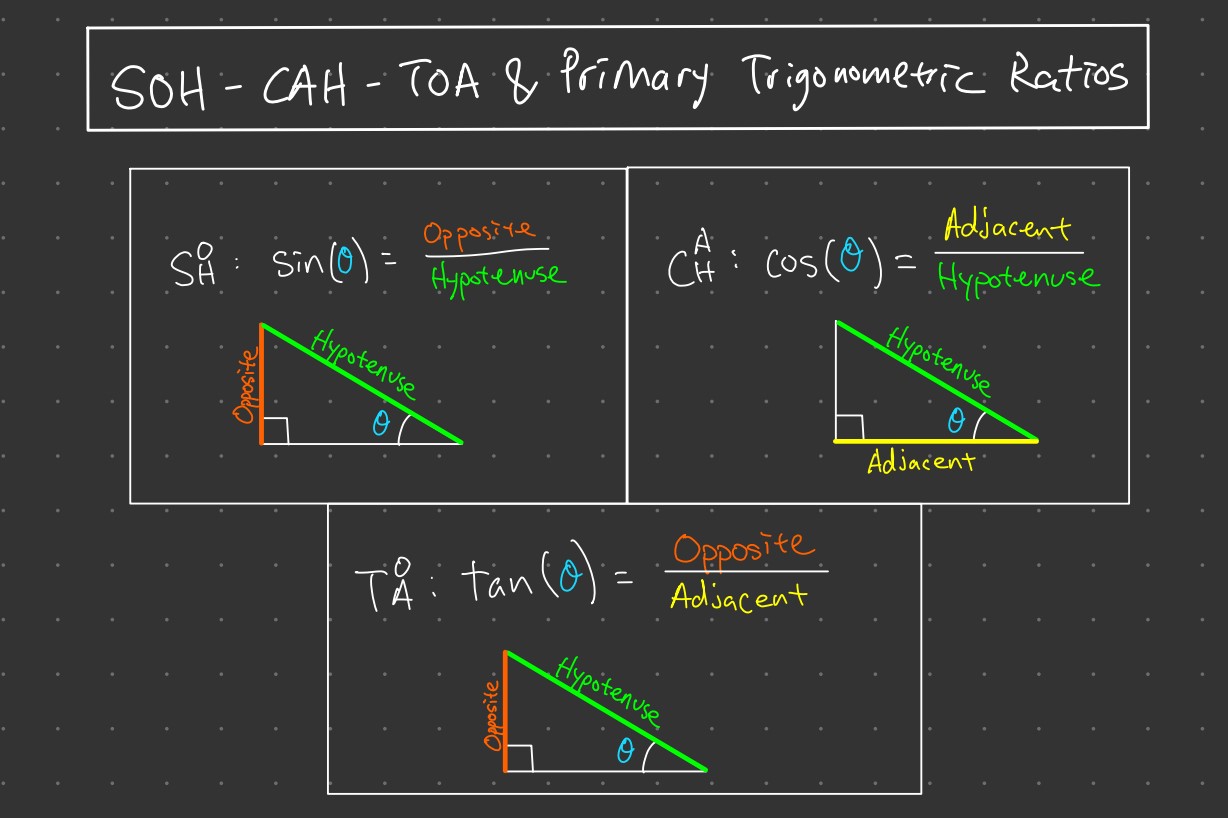
At its core, SOHCAHTOA is a tool for analyzing right-angled triangles. Each part of the mnemonic represents a trigonometric ratio:
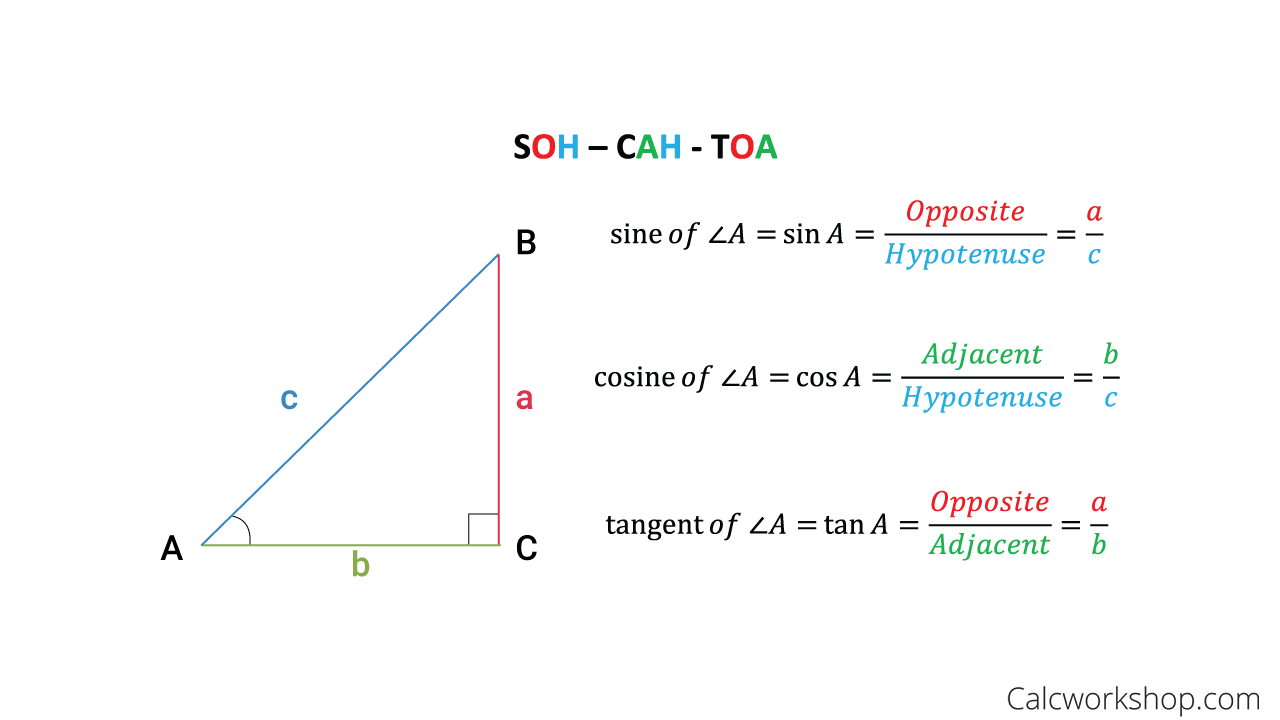
- SOH: Sine = Opposite / Hypotenuse
- CAH: Cosine = Adjacent / Hypotenuse
- TOA: Tangent = Opposite / Adjacent
In the context of flight technology, these relationships allow us to calculate unknown sides or angles of a right triangle when we know some of the others. This capability is indispensable for processing data from various onboard sensors and for designing the algorithms that govern a drone’s behavior.
Applying Sine, Cosine, and Tangent to Flight Systems
Imagine a drone hovering in the air. Its position and orientation can be represented in three-dimensional space. To maintain a stable hover, the drone’s flight controller constantly receives data from its Inertial Measurement Unit (IMU), which includes accelerometers and gyroscopes. These sensors detect changes in acceleration and angular velocity, essentially measuring how the drone is moving and rotating.
The raw data from these sensors often needs to be processed using trigonometric principles to extract meaningful information. For instance, accelerometers measure acceleration along each of the drone’s three axes (pitch, roll, and yaw). If the drone is tilted, the acceleration due to gravity (a constant force acting downwards) will be distributed across these axes. Using sine and cosine, the flight controller can calculate the angle of tilt (pitch and roll) based on the measured acceleration components.
Consider a simplified scenario where a drone is pitched forward. The accelerometer might detect a component of gravity pulling it backward along its forward-facing axis. By knowing the magnitude of the acceleration due to gravity and the measured component along a specific axis, we can use the cosine function to determine the angle of the pitch. Similarly, if we know the pitch angle, we can use sine to calculate the component of gravity acting along the vertical axis.
Furthermore, when dealing with navigation, the concept of bearing and distance is crucial. GPS systems provide latitude and longitude coordinates, but to calculate a direct path or a change in position, we often need to convert these spherical coordinates into planar approximations or use spherical trigonometry. In simpler, localized navigation, when a drone needs to travel a specific distance in a particular direction, trigonometry is used to break down the desired displacement vector into its X, Y, and Z components.
Role in Navigation and Positioning
Accurate navigation is paramount for any aerial vehicle, from simple recreational drones to sophisticated industrial UAVs. SOHCAHTOA principles underpin the mathematical models used in various navigation systems.
GPS and Coordinate Transformations
While GPS provides latitude and longitude, these are global coordinates. For local navigation and precise control, these coordinates are often transformed into a local Cartesian (X, Y, Z) coordinate system. This transformation involves complex calculations that utilize trigonometric functions to account for the Earth’s curvature and the drone’s relative position.
For example, to determine the distance and bearing between two GPS points, especially over shorter distances where the Earth can be approximated as flat, basic trigonometry is applied. If we consider a small segment of the Earth’s surface, we can approximate it as a plane. The difference in longitude can be thought of as one leg of a triangle, and the difference in latitude, adjusted by the cosine of the latitude (to account for the shrinking circumference of the Earth towards the poles), forms another leg. The Pythagorean theorem (derived from trigonometry) can then be used to calculate the straight-line distance, and the arctangent function (the inverse of tangent) can be used to determine the bearing.
Waypoint Navigation and Path Planning
When a drone is programmed to follow a series of waypoints, the flight controller needs to calculate the necessary control inputs to move from its current position to the next waypoint. This involves determining the direction and magnitude of the required flight path. Trigonometry is used to decompose the desired displacement vector into individual commands for the drone’s motors.
Imagine a drone needs to move from point A to point B. The flight controller knows the coordinates of both points. The difference in the X and Y coordinates gives us the horizontal displacement. Using the arctangent of the ratio of the Y displacement to the X displacement (arctan(ΔY/ΔX)), the drone can calculate the precise angle (bearing) it needs to fly. The distance can be calculated using the Pythagorean theorem: distance = √(ΔX² + ΔY²). These calculated angle and distance values are then translated into specific motor speed commands to achieve the desired movement.
Stabilization Systems and Attitude Control
One of the most critical applications of trigonometry in flight technology is within the drone’s stabilization systems. Drones are inherently unstable platforms. Without sophisticated control systems, they would tumble uncontrollably.
IMU Data Interpretation and Attitude Estimation
The IMU, as mentioned earlier, provides raw data about the drone’s angular velocity and linear acceleration. The flight controller’s core task is to interpret this data and maintain the drone in a desired attitude (pitch, roll, and yaw). This process, known as attitude estimation, heavily relies on trigonometry.
When a drone is tilted, the accelerometers register components of the gravitational acceleration vector. For instance, if the drone pitches forward, the accelerometer aligned with the drone’s forward axis will measure a component of gravity pulling it backward. Conversely, if it rolls to the right, the accelerometer aligned with the right wing will measure a component of gravity pulling it downwards.
Using sine and cosine, the flight controller can convert these measured accelerations into angles of pitch and roll. If ‘ax’ is the acceleration measured along the drone’s forward-backward axis and ‘ay’ is the acceleration measured along the drone’s left-right axis, and ‘g’ is the acceleration due to gravity, then:
- Pitch angle (θ) ≈ arctan(ax / √(ay² + az²)) (where az is vertical acceleration)
- Roll angle (φ) ≈ arctan(ay / √(ax² + a_z²))
These raw angle estimates are then fused with data from the gyroscopes, which measure angular rate of change, to provide a more accurate and responsive estimate of the drone’s current attitude. This fusion process often involves algorithms like the Kalman filter or complementary filters, which mathematically combine the strengths of both sensor types, with trigonometric relationships forming the backbone of how the accelerometer data is interpreted into angles.
Control Loop Calculations
Once the drone’s attitude is accurately estimated, the flight controller uses this information to calculate the necessary adjustments to motor speeds to maintain stability. If the drone drifts off its desired pitch or roll angle, the control loop will detect this deviation. Using PID (Proportional-Integral-Derivative) controllers or more advanced algorithms, it calculates corrective commands.
These corrective commands are essentially adjustments to the thrust of each motor. The required thrust adjustments are often determined by considering the forces and torques acting on the drone. Trigonometric principles are used to resolve these forces and torques into their components along the drone’s axes, allowing the controller to precisely command the motors to counteract any unwanted rotation or translation. For example, to correct a pitch angle, the controller will increase the thrust of the rear motors and decrease the thrust of the front motors (or vice versa, depending on the direction of the error), with the magnitude of these adjustments being proportional to the detected error, often scaled by trigonometric functions of the desired and current angles.
Advanced Applications and Future Trends
As flight technology continues to evolve, the fundamental mathematical principles, including those derived from SOHCAHTOA, remain critical, albeit often abstracted within sophisticated software.
Sensor Fusion and State Estimation
Modern drones often incorporate a wide array of sensors, including vision sensors, LiDAR, radar, and barometer. Effectively combining data from these diverse sources to create a comprehensive and accurate understanding of the drone’s state (position, velocity, attitude, surrounding environment) is known as sensor fusion. Trigonometric principles are foundational to many sensor fusion algorithms.
For instance, when a vision system identifies features in an image, their apparent position can be used with known camera parameters (focal length, sensor size) to estimate their 3D position relative to the drone. This often involves inverse trigonometric operations. Similarly, when using LiDAR, range and bearing measurements are directly used, and when combined with the drone’s own attitude and position, they create a detailed point cloud of the environment. Trigonometry is used to transform these measurements into a common coordinate frame.
Autonomous Flight and Obstacle Avoidance
The dream of fully autonomous flight is becoming a reality, with drones navigating complex environments without human intervention. SOHCAHTOA principles are integral to the algorithms that enable this autonomy.
Obstacle avoidance systems rely on sensors to detect potential collisions. When an obstacle is detected, the system must quickly calculate the distance, bearing, and relative velocity of the obstacle. Trigonometry is used to convert sensor readings (e.g., pixel coordinates in an image, range and angle from a LiDAR scanner) into spatial information. This information is then used by path planning algorithms to determine a safe trajectory to steer the drone away from the obstacle. These algorithms often involve calculating angles and distances to potential collision points and then determining the optimal vector for evasive maneuvers.
Robotics and Control Theory Integration
The flight control systems of modern drones are essentially sophisticated robotic controllers. The principles of robotics, which are heavily reliant on mathematics, integrate seamlessly with control theory. Trigonometric functions are fundamental to defining coordinate transformations, rotation matrices, and the kinematic and dynamic models of the aerial vehicle. As drones become more integrated into complex robotic systems, performing tasks like manipulation or cooperative flight, the underlying trigonometric calculations become even more sophisticated, often involving complex vector and matrix operations where the basic sine, cosine, and tangent relationships are implicitly used.
In conclusion, while the mnemonic SOHCAHTOA might appear to be a relic of basic geometry, its mathematical underpinnings are deeply embedded in the advanced systems that enable modern flight technology. From the fundamental stabilization that keeps a drone airborne to the complex navigation and autonomy required for advanced applications, trigonometry provides the essential tools for understanding, calculating, and controlling the behavior of these remarkable machines.