The intricate dance of a drone, soaring through the air with precision, maintaining stable altitude, executing complex maneuvers, and even avoiding obstacles, is a marvel of modern engineering. At the heart of this seemingly effortless flight lies a profound understanding and constant application of fundamental physical concepts: scalars and vectors. These mathematical tools are not abstract theories for drone engineers; they are the bedrock upon which flight technology—from basic navigation to advanced stabilization systems and GPS—is built. To truly grasp how a drone operates, one must first understand this crucial distinction.
The Fundamental Distinction: Magnitude vs. Magnitude and Direction
In the realm of physics and engineering, quantities are classified based on whether they possess direction in addition to their magnitude. This categorization is vital for accurately describing motion, forces, and spatial relationships, all of which are central to drone flight.
Understanding Scalar Quantities in Flight
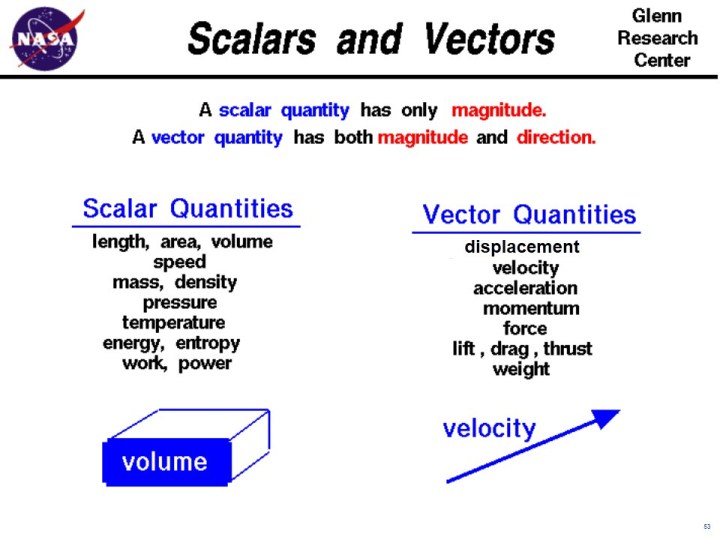
A scalar quantity is defined solely by its magnitude or size. It has no associated direction. When we talk about how “much” of something there is, or its value, without regard for its orientation in space, we are dealing with a scalar. In the context of drone flight technology, several key parameters are scalars:
- Speed: This is a classic example. When a drone is flying at 30 miles per hour, “30 mph” is its speed. It tells us how fast the drone is moving but gives no indication of whether it’s flying north, south, up, or down. While critical for understanding performance and battery drain, speed alone is insufficient for navigation.
- Distance: The total length of the path traveled by a drone, regardless of its turns or changes in direction, is a scalar. If a drone flies 100 meters, that’s a distance. It doesn’t specify the starting point, endpoint, or the path taken.
- Mass: The amount of matter in the drone is its mass, a scalar quantity. This is crucial for calculating thrust requirements and inertia, but it doesn’t have a direction.
- Temperature: Environmental temperature or the temperature of electronic components (like motors or batteries) are scalar measurements. They are vital for flight safety and performance, but they simply represent a degree of hotness or coldness.
- Time: The duration of a flight or the time taken to complete a maneuver is a scalar. It progresses uniformly without any inherent direction in space.
- Energy and Power: The battery’s stored energy capacity or the power being consumed by the motors are scalar quantities. They quantify the work done or the rate at which work is done, irrespective of direction.
These scalar quantities provide essential context and constraints for drone operations, allowing pilots and autonomous systems to monitor performance, manage resources, and understand the general state of the aircraft.
Grasping Vector Quantities in Drone Operations
In stark contrast to scalars, a vector quantity possesses both magnitude and direction. Vectors are indispensable for describing anything that involves movement or force in a specific orientation. When a drone is not just moving, but moving towards a specific point or under the influence of a particular force, vectors become the language of description. A vector is often represented graphically as an arrow, where the length of the arrow signifies its magnitude and the way it points indicates its direction.
Consider these vital vector quantities in drone flight:
- Velocity: This is the vector counterpart to speed. Velocity describes not only how fast a drone is moving but also in what direction. A drone moving at “30 mph north” has a velocity vector. For navigation, velocity is far more useful than speed because it tells us where the drone is going to be in the next instant.
- Displacement: While distance is a scalar, displacement is a vector. It describes the straight-line distance and direction from a drone’s starting point to its final position, irrespective of the path taken. If a drone flies from point A to point B, its displacement vector points from A to B, with a magnitude equal to the straight-line distance between them.
- Force: Any push or pull exerted on the drone is a force, a vector quantity. This includes the thrust generated by propellers, the force of gravity pulling the drone downwards, and aerodynamic drag and lift forces. Each of these forces has a specific magnitude and acts in a particular direction.
- Acceleration: When a drone changes its velocity (either its speed, its direction, or both), it is accelerating. Acceleration is a vector, indicating both the rate of change of velocity and the direction in which that change is occurring. Propellers generate thrust to accelerate the drone upwards, forwards, or sideways.
- Angular Velocity/Acceleration: Not just linear motion, but rotational motion also involves vectors. Angular velocity describes how fast and in what direction a drone is rotating around an axis (e.g., pitching up, rolling sideways, or yawing horizontally). Angular acceleration describes the rate of change of this rotational speed and direction.
Understanding vectors is foundational because drone flight is inherently three-dimensional and dynamic. Every adjustment made by a flight controller, every reading from a sensor, and every commanded movement relies on processing and manipulating vector quantities to ensure accurate and stable flight.
Vectors in Drone Navigation and Control
The ability to accurately navigate and control a drone is entirely dependent on the continuous measurement, calculation, and application of various vector quantities. These vectors define the drone’s present state and dictate its future trajectory.
Position and Velocity Vectors
At any given moment, a drone’s exact location in 3D space can be described by a position vector, typically relative to a fixed origin (like its takeoff point or a global coordinate system). This vector points from the origin to the drone’s current coordinates (e.g., X, Y, Z or Latitude, Longitude, Altitude). As the drone moves, this position vector changes.
The rate at which the position vector changes is the drone’s velocity vector. If a drone’s position vector at time t is $mathbf{r}(t)$, then its velocity vector $mathbf{v}(t)$ is the derivative of $mathbf{r}(t)$ with respect to time. This vector tells the flight controller not just where the drone is, but precisely where it is heading and how fast it is moving in that direction. For a drone to autonomously follow a pre-programmed flight path, its control system must constantly compare its current position and velocity vectors with target vectors and generate corrective actions.
Forces and Acceleration: The Dynamics of Flight
Newton’s second law of motion, $mathbf{F} = mmathbf{a}$ (Force equals mass times acceleration), highlights the vector relationship between force and acceleration. The total force vector acting on a drone dictates its acceleration vector. The drone’s propellers generate thrust, which is a vector force. The magnitude of this thrust can be adjusted by changing the motor RPMs, and its direction is primarily upwards (relative to the drone’s body frame), but it can be tilted by changing the drone’s pitch and roll.
Gravity exerts a constant downward force vector. Aerodynamic forces like lift and drag also act as vectors. The flight controller’s job is to precisely balance and manipulate these force vectors to achieve desired accelerations. For instance, to move forward, the drone pitches slightly, tilting the thrust vector forward, thus creating a net forward force and acceleration. To hover, the upward thrust vector must exactly counteract the downward gravitational force vector, resulting in zero net force and zero acceleration (constant velocity, typically zero).

Angular Motion and Orientation
Beyond linear motion, a drone’s orientation—its pitch, roll, and yaw—is critical for flight stability and control. These are described using angular vectors.
- Pitch: Rotation around the lateral axis (nose up/down).
- Roll: Rotation around the longitudinal axis (wing up/down).
- Yaw: Rotation around the vertical axis (nose left/right).
When a drone pitches up, it is experiencing an angular velocity vector around its lateral axis. The gyroscopes within the flight controller measure these angular velocity vectors. To maintain a stable hover, the drone must have zero angular velocity and zero angular acceleration vectors. If an external disturbance (like wind) tries to induce an unwanted roll, the flight controller detects this angular velocity vector and applies corrective thrust adjustments to counteract it, generating an opposing angular acceleration vector to restore stability. Understanding and manipulating these angular vectors allows for stable flight and agile maneuvers.
Sensors and Data: Translating the Physical World into Vectors and Scalars
Modern drones are equipped with an array of sophisticated sensors that continuously measure physical phenomena and convert them into electrical signals. These signals are then processed by the flight controller to extract scalar and vector quantities, forming the basis for all flight decisions.
GPS and Positional Data
The Global Positioning System (GPS) is perhaps the most well-known technology for providing positional data. A GPS receiver on a drone acquires signals from multiple satellites to calculate its precise latitude, longitude, and altitude. While these coordinates are often expressed as scalar numbers, together they define the drone’s position vector in a global frame of reference. By continuously tracking these position vectors over time, the flight controller can derive the drone’s ground speed (scalar) and, crucially, its ground velocity vector, indicating its movement across the earth’s surface. This information is vital for waypoint navigation, return-to-home functions, and maintaining position hold.
Accelerometers and Gyroscopes
The Inertial Measurement Unit (IMU) is the nerve center of a drone’s stabilization system, comprising accelerometers and gyroscopes.
- Accelerometers measure proper acceleration (the acceleration experienced by objects at rest in a gravitational field, or subject to other forces). They provide three scalar values, one for each axis (X, Y, Z), representing the components of the acceleration vector. By integrating acceleration over time, and correcting for gravity, the flight controller can estimate changes in the drone’s velocity vector.
- Gyroscopes measure angular velocity. Like accelerometers, they provide three scalar values, representing the components of the angular velocity vector around each of the drone’s three axes (pitch, roll, yaw). These measurements are critical for detecting and correcting any unwanted rotations, ensuring the drone remains level and stable. The flight controller uses these angular velocity vectors to understand how the drone is rotating and to command corrective motor thrusts to counteract these rotations, thereby maintaining desired attitude.
Magnetometers and Heading
A magnetometer, often referred to as an electronic compass, measures the strength and direction of the Earth’s magnetic field. This provides scalar data (magnetic field strength components) that can be used to determine the drone’s heading, which is a key component of its orientation vector. Combined with accelerometer and gyroscope data, the magnetometer helps the flight controller establish an accurate and drift-free understanding of the drone’s absolute orientation in space, particularly its yaw (the direction it is facing relative to true north). This is crucial for precise navigation and maintaining a stable flight path, especially during autonomous missions.
Stabilization and Autonomous Flight: The Vector Calculus at Work
The culmination of understanding and sensing scalars and vectors is their application in sophisticated flight control algorithms, enabling both remarkable stability and advanced autonomous capabilities.
PID Controllers and Vector Feedback
At the core of virtually every drone’s stabilization system is a Proportional-Integral-Derivative (PID) controller. This algorithm works by constantly comparing the drone’s desired state (a set of target position, velocity, and angular vectors) with its actual state (measured by sensors). The difference between these two states is the “error” vector.
- Proportional (P) term: This term generates a corrective action proportional to the current error vector. If the drone is rolling too much, it immediately applies a strong counter-roll command.
- Integral (I) term: This term sums past errors over time, helping to eliminate steady-state errors (like a persistent drift) that the proportional term might miss.
- Derivative (D) term: This term anticipates future errors by looking at the rate of change of the current error vector. It helps to damp oscillations and makes the system respond more smoothly and quickly.
The output of the PID controller is a set of motor commands (scalar PWM values) that generate the necessary thrust vectors and angular acceleration vectors to nullify the error and bring the drone back to its desired state. This constant feedback loop, driven by vector mathematics, is what makes a drone feel incredibly stable in the air.
Obstacle Avoidance and Path Planning
Advanced autonomous drones utilize a complex interplay of sensors (like lidar, sonar, and vision cameras) to create a real-time, 3D map of their surroundings. This environment map consists of scalar distances to obstacles in various directions, which are then processed to identify potential collision points. Using these scalar distance measurements, the drone’s onboard computer calculates obstacle vectors—vectors pointing from the drone to the nearest obstacle.
Based on these obstacle vectors and the drone’s current velocity vector, path planning algorithms determine the safest and most efficient flight path. This often involves generating new target position and velocity vectors that steer the drone around obstacles while still progressing towards its ultimate destination. This requires sophisticated vector calculus to predict collision trajectories, calculate avoidance maneuvers, and generate smooth, collision-free paths in real-time.
The Future of Vector-Driven Autonomy
As drone technology continues to evolve, the reliance on scalar and vector quantities becomes even more profound. Artificial Intelligence (AI) and machine learning algorithms, which power features like autonomous navigation, object tracking, and even swarm intelligence, process vast amounts of sensor data. This data is invariably translated into vectors—be it object velocity vectors, gaze direction vectors for a camera, or relative position vectors between multiple drones.
The future of autonomous flight will see increasingly sophisticated vector algebra and calculus employed to enable drones to understand complex environments, predict dynamic changes, and make intelligent decisions with minimal human intervention. From robust navigation in GPS-denied environments to complex cooperative missions and intricate remote sensing operations, the fundamental concepts of scalars and vectors will remain the indispensable mathematical language that defines, controls, and propels the next generation of flight technology.