In the rapidly evolving landscape of drone technology, particularly within the realm of Tech & Innovation encompassing autonomous flight, AI follow modes, mapping, and remote sensing, the performance of underlying machine learning models is paramount. One critical metric used to evaluate these models, ensuring reliability and effectiveness in real-world aerial operations, is recall. Understanding recall is not merely an academic exercise; it is fundamental to developing safer, more intelligent, and more capable drone systems that can accurately perceive and interact with their environment.
Understanding the Fundamentals of Recall
Recall, often referred to as sensitivity or the true positive rate, is a vital performance metric in machine learning, especially for classification tasks. It quantifies the proportion of actual positive cases that were correctly identified by a model. In the context of drones, a “positive case” could be an obstacle, a target for tracking, a diseased plant, or a specific point of interest in a mapping operation.

The Core Formula and Terminology
To grasp recall, it’s essential to understand a few basic terms from a confusion matrix:
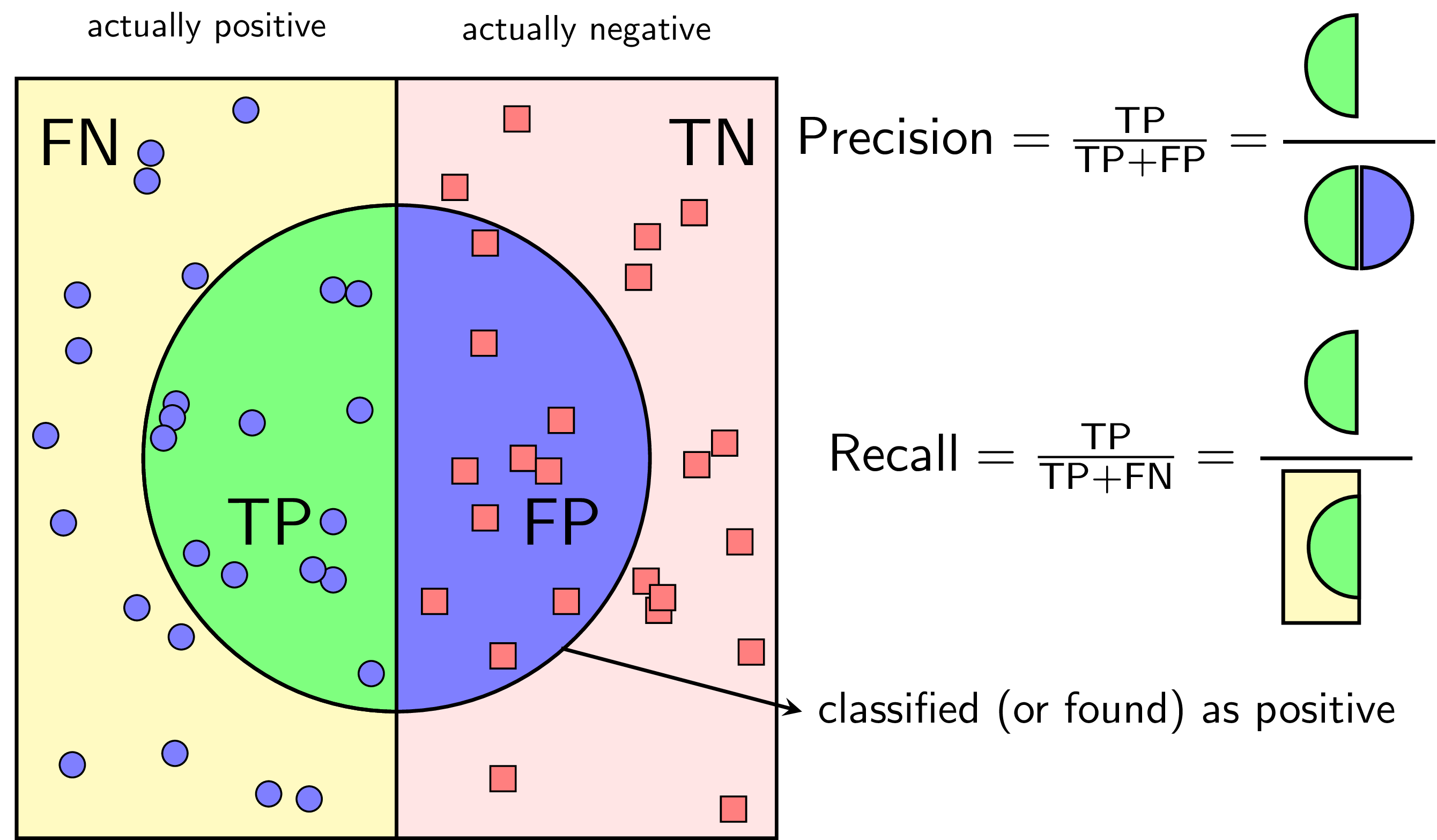
- True Positives (TP): Instances where the model correctly predicted the positive class. For a drone’s obstacle avoidance system, this would be correctly identifying a tree as an obstacle.
- False Negatives (FN): Instances where the model incorrectly predicted the negative class, but the actual class was positive. This is a missed detection. In obstacle avoidance, this would be failing to identify a tree that is actually there.
- True Negatives (TN): Instances where the model correctly predicted the negative class. The drone correctly identified open sky as not an obstacle.
- False Positives (FP): Instances where the model incorrectly predicted the positive class, but the actual class was negative. This is a false alarm. The drone identifies a shadow on the ground as an obstacle when it is not.
The formula for recall is:
Recall = True Positives / (True Positives + False Negatives)
This formula highlights recall’s focus: out of all the instances that should have been identified as positive (TP + FN), how many did the model actually get right (TP)? A high recall score indicates that the model is very good at finding all the positive instances, minimizing the number of false negatives.
Recall vs. Precision: A Critical Balancing Act
While recall is crucial, it rarely tells the whole story on its own. It is often evaluated alongside precision, which measures the proportion of positive predictions that were actually correct (Precision = TP / (TP + FP)).
In many drone applications, there’s an inherent trade-off between recall and precision.
- High Recall, Lower Precision: A model optimized for very high recall will try to capture every possible positive instance, even if it means making a few false positive errors. For example, an obstacle avoidance system with extremely high recall might correctly identify every obstacle but also frequently trigger warnings for non-existent threats (e.g., shadows, distant birds), leading to unnecessary evasive maneuvers or aborted missions.
- High Precision, Lower Recall: Conversely, a model focused on high precision will be very confident in its positive predictions, making few false positive errors. However, it might miss some actual positive instances, leading to false negatives. An obstacle avoidance system with high precision might only warn about definite obstacles, but it could potentially overlook a smaller, less obvious threat.
The optimal balance between recall and precision depends entirely on the specific drone application and the cost associated with different types of errors. For safety-critical systems like obstacle avoidance, minimizing false negatives (maximizing recall) is often prioritized, even at the expense of some false positives (lower precision).
Recall in Autonomous Flight and Obstacle Avoidance
Autonomous flight relies heavily on the drone’s ability to perceive its environment and make real-time decisions. The machine learning models driving obstacle detection and avoidance systems are prime examples where recall plays a paramount role.
Ensuring Safety by Minimizing Missed Threats
In autonomous flight, a “false negative” means the drone fails to detect an actual obstacle in its flight path. This could be a power line, a tree branch, a bird, or another drone. The consequences of such a failure range from minor collisions to catastrophic crashes, posing significant safety risks to the drone itself, property, and even human life. Therefore, systems designed for obstacle avoidance must prioritize very high recall. They need to be exceptionally good at identifying every potential hazard.
Consider a drone operating beyond visual line of sight (BVLOS) for delivery or inspection. Its on-board AI must continuously scan the airspace and terrain for threats. If a model exhibits low recall, it means it’s prone to letting actual obstacles slip past its detection algorithms. Engineers designing these systems will often fine-tune their models to maximize recall, accepting a higher number of false positives (where the drone incorrectly identifies a non-threat as an obstacle) if it means drastically reducing the probability of missing a real one. An unnecessary evasive maneuver, though inconvenient, is far preferable to a collision.
Practical Implications for Navigation Systems
Achieving high recall in complex, dynamic environments is a significant engineering challenge. Factors like varying lighting conditions, weather, obstacle types (static vs. moving, large vs. small, transparent vs. opaque), and sensor limitations (camera resolution, LiDAR range) can all impact a model’s ability to maintain high recall. Developers leverage techniques such as data augmentation, diverse training datasets covering a wide array of scenarios, and robust feature engineering to improve the model’s robustness and ensure that fewer actual obstacles are missed.

For navigation systems, recall impacts path planning and rerouting capabilities. A system with high recall ensures that all detected obstacles are factored into the flight path, leading to safer, albeit potentially longer, routes. Low recall could result in the drone attempting to fly through an obstructed area, triggering emergency stops or collisions. The ultimate goal is a system where the “cost” of a false negative (a crash) is deemed infinitely higher than the “cost” of a false positive (a slight detour or temporary pause).
Elevating AI Follow Mode and Object Tracking
AI Follow Mode and object tracking functionalities are becoming standard features in many consumer and commercial drones. These features rely on machine learning models to identify and continuously track a designated subject (e.g., a person, vehicle, or animal) through various environments. Here, recall signifies the model’s ability to maintain a lock on its target.
Maintaining Target Lock for Seamless Operation
In an AI follow mode, a “false negative” occurs when the drone’s vision system loses track of the target even though the target is still present within the drone’s field of view and operational range. This could happen if the target briefly moves behind an object, changes appearance (e.g., turns around), or if lighting conditions shift. If recall is low, the drone will frequently lose its target, leading to a frustrating user experience where the drone stops following or incorrectly switches to tracking another object.
For drone operators, especially those engaged in sports videography, surveying wildlife, or security monitoring, a drone that reliably stays locked onto its subject is invaluable. A high recall score for the tracking model means that the drone is highly effective at re-acquiring the target and maintaining its focus, even when faced with temporary occlusions or challenging visual conditions. The system is designed to minimize instances where the target “disappears” from its tracking logic, prioritizing continuous monitoring.
Enhancing User Experience and Reliability
The impact of recall on user experience in AI follow mode is direct. Users expect a seamless, uninterrupted tracking experience. A drone that frequently loses its target disrupts filmmaking, compromises surveillance efforts, and diminishes the overall utility of the feature. To achieve high recall, machine learning models for object tracking are often trained on vast datasets featuring targets in diverse settings, undergoing various movements, and encountering different environmental challenges. Techniques like multi-object tracking, prediction algorithms, and robust feature descriptors help models “remember” and re-identify targets more effectively, contributing to higher recall.
Furthermore, a high-recall tracking system contributes significantly to the reliability of autonomous operations. For example, in a security patrol scenario, a drone tasked with tracking an intruder must maintain constant vigilance. A low-recall system might lose the intruder, compromising the security objective. Thus, ensuring high recall is not just about convenience but also about the integrity and effectiveness of the drone’s mission.
Optimizing Mapping and Remote Sensing Outcomes
Drones equipped with advanced sensors are revolutionizing mapping, surveying, and remote sensing across various industries, from agriculture to environmental monitoring and infrastructure inspection. Machine learning models are extensively used to analyze the vast amounts of data collected by these drones, and recall is a critical metric for ensuring comprehensive analysis.
Comprehensive Detection for Critical Analysis
In mapping and remote sensing, “false negatives” represent critical missed detections. For instance:
- Agriculture: A drone monitoring crop health might use machine learning to identify diseased plants. A false negative here means failing to identify an actual diseased plant, potentially leading to delayed intervention and wider crop loss.
- Infrastructure Inspection: A drone inspecting a bridge for structural defects might classify areas of corrosion or cracks. A false negative means missing an actual defect, which could have severe safety implications.
- Environmental Monitoring: Identifying invasive species, oil spills, or areas of deforestation. A false negative means failing to detect an existing environmental hazard.
In these applications, the goal is often to find every instance of a specific feature or anomaly. Missing even a single critical anomaly due to low recall can lead to significant financial losses, environmental damage, or safety hazards. Therefore, machine learning models used for classification in remote sensing are heavily optimized for high recall to ensure that the analysis is as comprehensive as possible.
Real-World Applications in Agriculture, Infrastructure, and Environment
Developing high-recall models for mapping and remote sensing involves sophisticated machine learning techniques. For example, in precision agriculture, models are trained on multispectral or hyperspectral imagery to identify specific plant diseases or nutrient deficiencies. Data scientists and engineers meticulously curate training datasets that include diverse examples of healthy and unhealthy crops under various conditions, ensuring the model learns to detect subtle indicators without fail.
Similarly, in infrastructure inspection, models are trained to recognize specific defect patterns (e.g., various types of cracks, rust, material fatigue) from visual or thermal drone data. The emphasis is on not missing any potential problem, even if it means occasional false alarms that require human verification. The trade-off leans heavily towards recall because the cost of missing a structural integrity issue far outweighs the cost of inspecting a non-existent one.
The Strategic Importance of Recall in Drone Innovation
The concept of recall, while a statistical measure, underpins much of the innovation in drone technology. As drones become more autonomous and undertake increasingly complex and critical missions, the reliability of their underlying AI systems becomes paramount. High recall ensures that these systems are robust in identifying what they are designed to find, minimizing dangerous omissions and maximizing operational effectiveness.
From safeguarding autonomous flights against unseen obstacles to consistently tracking subjects for dynamic content creation, and providing exhaustive analysis for critical remote sensing applications, recall serves as a benchmark for trustworthiness and thoroughness. Engineers and data scientists continuously refine their machine learning models to achieve an optimal balance of recall, precision, and other metrics, tailored to the specific demands and inherent risks of each drone application. The relentless pursuit of higher recall in relevant contexts is a testament to the industry’s commitment to safety, efficiency, and expanding the capabilities of uncrewed aerial systems.