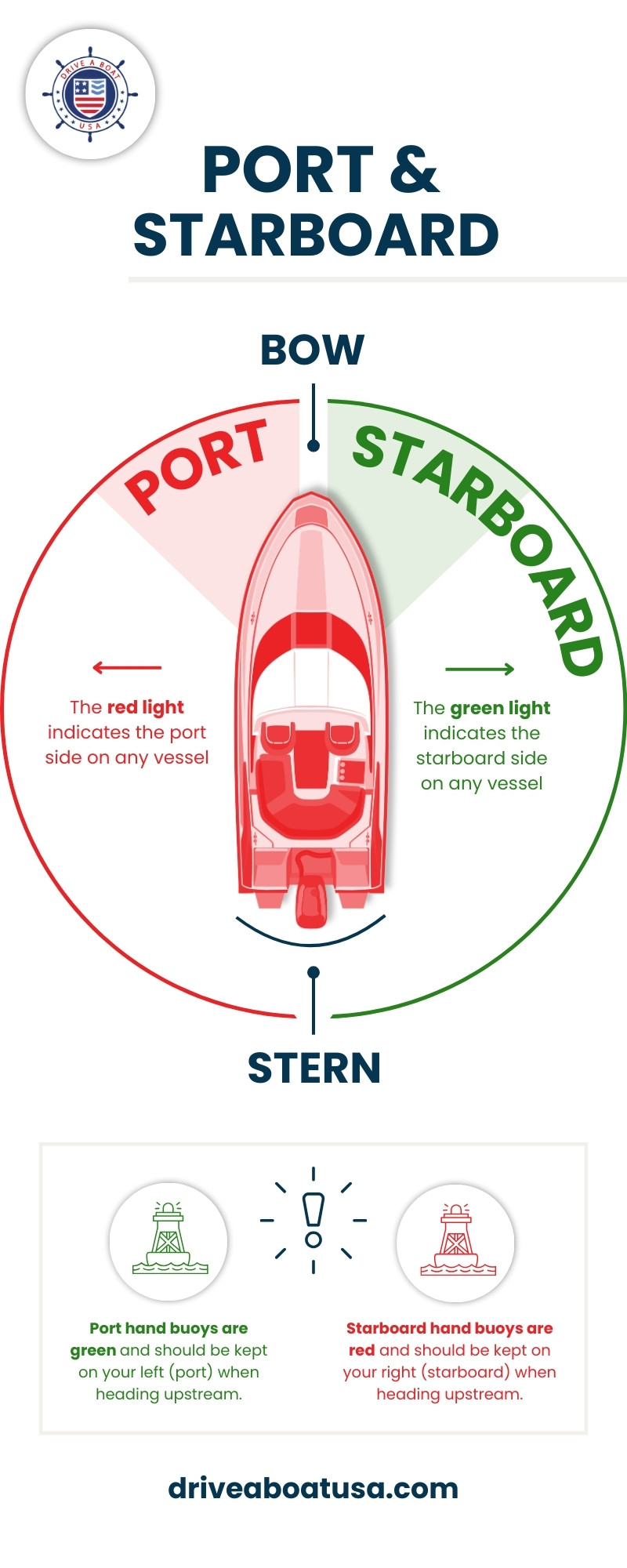
The traditional definition of “port side” on a vessel, always referring to the left-hand side when facing forward, establishes an immutable reference point crucial for maritime navigation, communication, and safety. This foundational principle—of defining and maintaining a consistent internal orientation relative to a direction of travel or a fixed forward axis—is not unique to marine vessels. In the realm of unmanned aerial vehicles (UAVs), commonly known as drones, the precise understanding and management of a craft’s orientation are equally, if not more, vital for stable flight, accurate navigation, and the execution of sophisticated missions. While drones do not typically utilize “port” or “starboard” terminology, the technological mechanisms by which they achieve an equivalent, unwavering sense of their own “forward,” “up,” and “side-to-side” are at the very heart of modern flight technology. This intricate interplay of sensors, computational algorithms, and external positioning systems allows drones to interpret their spatial relationship to the environment, enabling everything from hovering in a fixed position to executing complex autonomous flight paths with unparalleled precision.
Establishing a Fixed Frame of Reference in Flight
For any vehicle, whether on water, land, or in the air, a consistent frame of reference is paramount for control and navigation. Without it, commands such as “move left” or “turn right” would be ambiguous and potentially lead to chaotic outcomes. Drones, operating in three-dimensional space, face even greater challenges in maintaining this spatial awareness. Unlike a human pilot who can visually orient themselves, a drone relies entirely on its onboard systems to establish and maintain its internal orientation—its roll, pitch, and yaw—and to understand its position relative to the ground and other objects.
The Imperative of Internal Orientation
Internal orientation, often referred to as attitude, is the drone’s understanding of its angular position relative to a stable reference frame. Roll describes rotation about the drone’s longitudinal (front-to-back) axis, dictating its tilt from side to side. Pitch describes rotation about its lateral (wing-to-wing) axis, indicating its nose-up or nose-down angle. Yaw refers to rotation about its vertical axis, controlling its heading or direction of facing. These three degrees of freedom are continuously monitored and adjusted by the flight controller to ensure stability and responsiveness to pilot commands or programmed flight paths. Just as a ship’s port side always remains its left, a drone’s internal axes are rigidly defined and its flight systems constantly work to align the drone with its intended attitude, even in the face of external disturbances like wind gusts. This constant stabilization is the bedrock of precise drone flight, allowing for smooth movements, stable camera platforms, and accurate trajectory following.
Beyond Simple Cardinal Directions
While cardinal directions (North, South, East, West) provide an external, absolute reference, a drone’s internal orientation goes deeper. It’s about the vehicle’s dynamic relationship with these directions and its own motion. For instance, a drone might be programmed to fly “forward” relative to its current heading, even if that heading is not due North. Simultaneously, its internal systems must continuously calculate its actual absolute position and orientation to ensure mission parameters are met. This requires sophisticated sensor fusion, integrating data from multiple sources to create a robust and real-time understanding of the drone’s position and attitude, constantly refining its “sense” of direction and stability.
Inertial Measurement Units (IMUs) and Their Role
The cornerstone of a drone’s internal orientation system is the Inertial Measurement Unit (IMU). This compact electronic device contains a suite of sensors designed to detect the drone’s angular velocity, acceleration, and sometimes magnetic field. The IMU provides the raw data necessary for the flight controller to understand the drone’s current attitude and how it is changing, forming the basis for real-time stabilization.
Gyroscopes and Accelerometers: The Core of Orientation
Gyroscopes measure angular velocity, detecting how fast the drone is rotating around its three axes (roll, pitch, and yaw). These sensors are crucial for immediate response to any deviation from the desired attitude. If a drone starts to roll unexpectedly due to turbulence, the gyroscopes instantly detect this angular change, allowing the flight controller to apply counter-thrust to the motors to bring it back to level. Accelerometers, on the other hand, measure linear acceleration in all three dimensions. While primarily used to determine the drone’s velocity and position, they also play a vital role in determining static orientation by sensing the direction of gravity. By integrating accelerometer data over time, and combining it with gyroscope readings, the flight controller can estimate the drone’s pitch and roll angles even during dynamic maneuvers. However, accelerometers are prone to drift and can be affected by vibrations, necessitating their fusion with other sensors for long-term accuracy.
Magnetometers: Calibrating for True Heading
To provide a true sense of direction, IMUs often include a magnetometer, commonly known as a digital compass. This sensor measures the strength and direction of the Earth’s magnetic field, allowing the drone to determine its heading relative to magnetic north. While gyroscopes provide excellent short-term angular rate data, they drift over time, meaning their accumulated error can lead to an inaccurate sense of sustained yaw or heading. Magnetometers correct this drift, providing a stable, absolute reference for the drone’s yaw axis. This is akin to a ship’s compass, providing the ultimate reference for its forward direction. However, magnetometers can be susceptible to magnetic interference from the drone’s own electrical components, motors, or nearby metallic objects, requiring careful calibration and advanced filtering techniques to ensure accuracy. The integration of gyroscope, accelerometer, and magnetometer data through complex algorithms like Kalman filters results in a highly accurate and robust estimation of the drone’s attitude, providing the digital equivalent of a ship’s precisely defined “port side” and forward orientation.
Global Positioning Systems (GPS) and External Referencing
While the IMU provides essential internal orientation, understanding the drone’s exact location in the wider world requires external referencing. Global Positioning Systems (GPS) are the primary technology for achieving this, providing absolute positional data that complements the IMU’s relative orientation information.
Absolute Position vs. Relative Orientation
GPS receivers on drones communicate with a constellation of satellites orbiting Earth, calculating the drone’s latitude, longitude, and altitude based on the timing differences of signals received from multiple satellites. This provides the drone with its absolute position on the planet. While an IMU tells the drone its attitude (e.g., it’s tilted 10 degrees to the right), GPS tells it where on Earth it is. The combination of absolute position from GPS and accurate attitude from the IMU is crucial for complex navigation tasks, such as flying to specific waypoints, maintaining a precise orbit around an object, or executing predefined grid patterns for mapping. It allows the drone to translate internal movements into meaningful external trajectories.
RTK and PPK: Enhancing Positional Accuracy
Standard GPS accuracy, typically within a few meters, might be sufficient for general recreational flight, but precision applications like surveying, precision agriculture, and detailed cinematic shots demand much higher accuracy. This is where Real-Time Kinematic (RTK) and Post-Processed Kinematic (PPK) systems come into play. RTK involves a ground-based reference station that corrects GPS signals in real-time, sending differential corrections to the drone. This significantly reduces positional error, often to within a few centimeters. PPK achieves similar high accuracy by recording raw GPS and IMU data during flight and applying corrections during post-processing using data from a static ground station. Both RTK and PPK elevate the drone’s positional awareness to an unprecedented level, allowing it to navigate complex environments with the kind of certainty that ensures every programmed movement is executed flawlessly, much like a highly skilled captain knowing the exact bearing and position of their vessel.
Vision Systems and Advanced Spatial Awareness
Beyond inertial and satellite-based systems, advanced drones increasingly integrate vision systems to enhance spatial awareness, particularly in environments where GPS signals are weak or unavailable, or for highly dynamic tasks like obstacle avoidance and precision landing. These systems provide a rich, real-time understanding of the drone’s immediate surroundings.
Optical Flow and Visual Odometry
Optical flow sensors, typically downward-facing cameras, measure the movement of features on the ground to determine the drone’s velocity and assist in maintaining a stable hover, especially indoors or at low altitudes where GPS is unreliable. By analyzing how patterns in the captured images shift over time, the drone can infer its own motion relative to the ground. Visual odometry (VO) takes this concept further, using one or more cameras to estimate the drone’s position and orientation by tracking visual features across a sequence of images. VO can reconstruct a 3D map of the environment while simultaneously determining the drone’s pose within that map. This allows for navigation in GPS-denied environments and enhances the robustness of the overall navigation system by providing an independent source of positional and velocity data.
Stereoscopic Vision for Depth Perception
Just as humans use two eyes to perceive depth, some advanced drones employ stereoscopic vision systems, featuring two or more cameras positioned to mimic human binocular vision. By analyzing the slight differences in the images captured by each camera, the drone can calculate the distance to objects in its field of view, creating a real-time 3D map of its immediate surroundings. This capability is vital for robust obstacle avoidance, allowing the drone to detect hazards and dynamically adjust its flight path to prevent collisions. It also contributes to safer autonomous flight, enabling the drone to navigate complex spaces and perform intricate maneuvers while maintaining a critical awareness of its physical environment, far beyond what simple range sensors can provide.

The Synthesis: Achieving Precise and Stable Flight
The robust flight technology powering modern drones is not reliant on a single sensor or system. Instead, it is the sophisticated fusion of data from IMUs, GPS, magnetometers, and vision systems that creates a comprehensive, resilient, and highly accurate picture of the drone’s position and orientation. Complex algorithms continuously process and cross-reference these diverse data streams, filtering out noise, correcting for drift, and providing a cohesive real-time model of the drone’s state.
This sensor fusion ensures that even if one sensor momentarily provides erroneous data (e.g., GPS signal loss in a dense urban canyon or magnetic interference affecting the compass), the other systems can compensate, maintaining a continuous and reliable understanding of the drone’s attitude and position. This integrated approach allows drones to perform incredibly stable hovers, execute complex acrobatic maneuvers, follow precise flight paths for mapping or surveying, and navigate autonomously through challenging environments. The constant, unfailing awareness of its internal orientation and external position is what grants the drone its exceptional control and capability, embodying the very essence of establishing a clear, unambiguous “port side” for safe and effective navigation in the dynamic skies.