In the dynamic realm of “Tech & Innovation,” particularly within the sophisticated world of unmanned aerial vehicles (UAVs) and advanced robotics, understanding fundamental mathematical concepts is crucial. One such concept, “polar form,” often flies under the radar for its profound impact on navigation, sensing, communication, and autonomous systems. Far from being a mere abstract mathematical construct, polar form provides an elegant and intuitive way to describe position, direction, and magnitude, making it indispensable for the development of cutting-edge drone technologies.
At its core, polar form is an alternative coordinate system that offers significant advantages over the more familiar Cartesian system in specific contexts. While Cartesian coordinates (x, y, z) define points based on perpendicular distances from axes, polar coordinates define points using a distance from an origin and an angle from a reference direction. This seemingly simple difference unlocks a powerful framework for various applications in drone technology.
Understanding the Basics: Cartesian vs. Polar Coordinates
To truly grasp the utility of polar form, it’s essential to first differentiate it from the Cartesian coordinate system, which most are familiar with.
The Cartesian system defines a point by its signed distances along a set of perpendicular axes—typically the x and y axes in two dimensions, or x, y, and z axes in three dimensions. For example, a point (5, 3) means 5 units along the x-axis and 3 units along the y-axis from the origin (0, 0). This system is excellent for describing linear movements, rectangles, and objects aligned with axes.
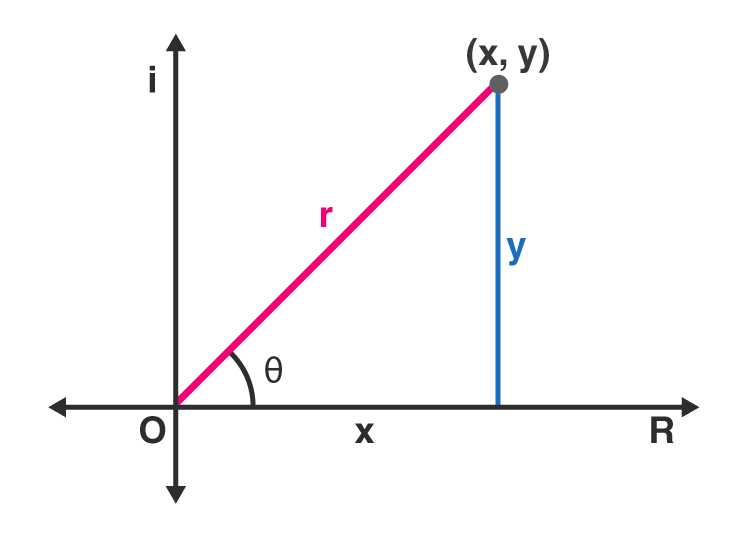
In contrast, the polar coordinate system defines a point by two primary values:
- r (radius or magnitude): The distance from the origin (often called the “pole”) to the point.
- θ (theta or angle): The angle (usually measured counter-clockwise) from a fixed reference direction (the “polar axis,” typically the positive x-axis) to the line segment connecting the origin to the point.
So, a point in polar form is represented as (r, θ). Imagine a drone hovering above a specific point on the ground (the origin). Its position relative to that point could be described by how far away it is (r) and what direction it is in (θ) relative to, say, due North. This representation inherently captures radial distances and angular displacements, which are pervasive in physical systems and sensor data.
Converting between Cartesian and polar forms is straightforward:
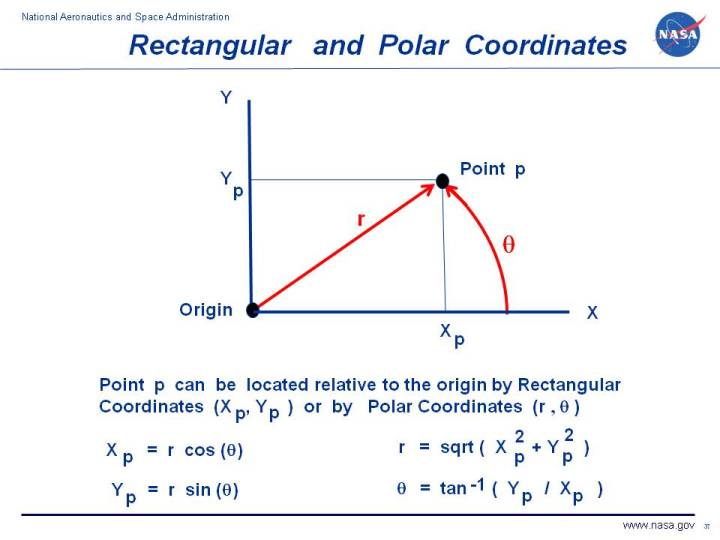
- From polar (r, θ) to Cartesian (x, y):
- x = r * cos(θ)
- y = r * sin(θ)
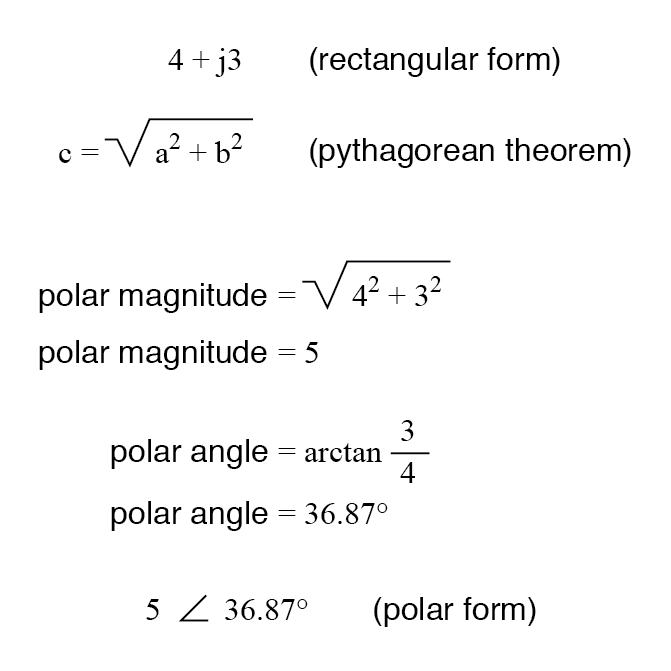
- From Cartesian (x, y) to polar (r, θ):
- r = √(x² + y²)
- θ = atan2(y, x) (using atan2 ensures the correct quadrant for θ)
While both systems can describe any point in space, one often proves more intuitive or computationally efficient depending on the problem. For anything involving rotations, circles, or distances from a central point, polar coordinates frequently offer a more natural and simplified representation.
Polar Form in Drone Navigation and Positioning
One of the most critical areas where polar form shines is in drone navigation and precise positioning, forming the backbone of advanced flight capabilities.
Relative Positioning and Waypoints
Drones frequently operate with a shifting frame of reference. Instead of always knowing their exact global GPS coordinates, it’s often more practical to determine their position relative to a launch point, a moving target, or another drone. Polar coordinates excel here. A drone can understand its location as “15 meters away at a 45-degree angle” from a home point, rather than a complex recalculation of absolute (latitude, longitude) coordinates. This relative positioning is vital for tasks like following a subject, maintaining formation in a swarm, or returning to base.
Waypoint navigation, a cornerstone of autonomous flight, also benefits. While waypoints are often defined using absolute coordinates, the drone’s internal path planning to reach these waypoints, especially when considering turns and arcs, can be simplified using polar logic. Defining a sequence of waypoints by a series of (distance, bearing) vectors relative to the drone’s current position makes the navigation process more robust to GPS drift and allows for dynamic path adjustments.
Flight Path Planning
Complex flight maneuvers, such as orbiting a subject for cinematic aerial footage or executing a search pattern, are inherently circular or arc-based. Describing these trajectories using Cartesian coordinates would involve intricate trigonometric functions for every point. In polar form, an orbit is simply maintaining a constant ‘r’ while incrementally changing ‘θ’. This simplifies flight control algorithms, making it easier for drones to execute smooth, precise circular movements, loitering patterns for surveillance, or spiral descent/ascent paths. The elegance of polar representation directly translates into more efficient and predictable flight planning.
Indoor Navigation
In environments where GPS signals are unreliable or unavailable (e.g., indoors, under dense foliage), drones must rely on alternative localization methods. These often involve using internal sensors (IMU, altimeter) combined with external localizing beacons or visual markers. When a drone triangulates its position from fixed points by measuring distances and angles, it is essentially working with polar or spherical coordinate concepts, even if the final output is converted to Cartesian for broader system compatibility.
Sensing the Environment: Lidar, Radar, and Sonar
The ability of drones to perceive their environment accurately is fundamental to obstacle avoidance, mapping, and remote sensing. Many advanced sensors inherently collect data in a format that aligns perfectly with polar coordinates.
Data Acquisition
Sensors like LiDAR (Light Detection and Ranging), radar (Radio Detection and Ranging), and sonar (Sound Navigation and Ranging) operate on a similar principle: they emit a pulse of energy (light, radio waves, sound waves) and measure the time it takes for the reflected energy to return. Crucially, they also record the direction from which the reflection came. This direct measurement yields data in polar form: a distance (r) and an angle (θ, and often φ for 3D scans).
- LiDAR scanners mounted on drones sweep a laser beam across the environment, generating millions of points, each defined by its distance and angular position relative to the scanner.
- Radar systems detect objects by transmitting radio waves and analyzing echoes, providing range and bearing data, essential for long-range obstacle detection or weather monitoring.
- Sonar sensors are used for short-range obstacle detection, especially near the ground or water, similarly providing distance and angular information.
Obstacle Avoidance
For immediate, reactive obstacle avoidance, processing raw polar sensor data is often more efficient than converting it to Cartesian first. When a LiDAR sensor reports “an object at 5 meters at a 30-degree angle to the front-right,” the drone’s flight controller can quickly assess the threat and initiate an evasive maneuver (e.g., shift trajectory away from that angle). This direct interpretation reduces computational overhead and reaction time, critical for safety in dynamic environments.
3D Mapping and Point Clouds
Combining multiple polar sensor readings from various vantage points allows drones to build sophisticated 3D models of their surroundings. These are often represented as “point clouds”—collections of data points in space. While these point clouds can be transformed into Cartesian coordinates for comprehensive mapping and visualization, the underlying data acquisition from rotating or scanning sensors (like a gimbaled LiDAR unit) is fundamentally polar. This applies to applications ranging from infrastructure inspection to agricultural surveying and environmental monitoring, where accurate spatial representation is paramount.
Communication and Signal Processing
Beyond physical navigation and sensing, polar concepts are also integral to how drones communicate and process signals.
Antenna Radiation Patterns
The performance of a drone’s communication system heavily depends on its antennas. The way an antenna transmits or receives radio waves is described by its “radiation pattern,” which is almost universally visualized and analyzed using polar plots. These plots show the signal strength as a function of the angle around the antenna. Understanding these patterns allows engineers to design antennas that optimize communication range, minimize interference, and ensure reliable data links between the drone and its ground control station, or between drones in a swarm. For instance, knowing an antenna has a stronger signal lobe in a particular direction can inform drone orientation during critical data transmissions.
Directional Communication
Advanced drone communication systems might employ directional antennas or beamforming techniques to focus signals in specific directions, improving data rates and security while reducing power consumption. The mathematical models underlying these techniques often leverage polar transformations to precisely steer and shape radio beams, making the drone’s communication more robust and efficient in congested electromagnetic environments. Even in military applications, understanding a drone’s radar cross-section (how detectable it is by radar) often involves analyzing reflections across a spectrum of angles, a polar interpretation crucial for stealth.
Future Innovations and Autonomous Systems
The foundational understanding provided by polar form continues to drive the next generation of innovations in drone technology, particularly in autonomous decision-making and swarm intelligence.
AI-Driven Decision Making
Artificial intelligence (AI) is increasingly vital for drones to make complex decisions in real-time. When AI processes vast amounts of sensor data—much of which originates in polar form (e.g., from LiDAR and radar)—it interprets this spatial and angular information to identify objects, classify environmental features, and predict trajectories. Advanced AI algorithms leverage the inherent angular and distance relationships within polar data to enable more sophisticated understanding of the environment, leading to smarter obstacle avoidance, target tracking, and even predictive analysis for safer and more effective autonomous operations.
Advanced Autonomous Flight Algorithms
As drones move towards full autonomy, the algorithms governing their flight need to be incredibly robust and adaptable. Polar coordinates simplify the computation of many critical flight dynamics, especially concerning turns, arcs, and coordinated movements. Whether it’s an autonomous drone navigating a dense forest, performing intricate inspection maneuvers around a structure, or precisely docking with a charging station, algorithms expressed in polar terms can often provide more elegant and computationally efficient solutions for path generation and control. This includes adaptive flight paths that react dynamically to changing environmental conditions, using sensor data to continually refine polar parameters for optimal movement.
Swarm Robotics and Relative Coordination
The future of many drone applications lies in swarm robotics, where multiple drones collaborate to achieve a common goal. For a swarm to maintain formation, perform synchronized maneuvers, or distribute tasks effectively, each drone needs to understand its position and orientation relative to its peers. Polar coordinates provide a natural framework for this relative coordination: “Drone B is 5 meters away from me at a 90-degree angle.” This approach allows for decentralized control and robust swarm behavior, as individual drones can react based on local, relative information rather than relying on a single, potentially vulnerable, global coordinate system. This enables more resilient and scalable autonomous systems, revolutionizing everything from search and rescue to large-scale data collection.
In conclusion, “polar form” is far more than a mathematical curiosity; it is a fundamental pillar supporting the advancements in drone technology. From precise navigation and environmental sensing to robust communication and the development of intelligent autonomous systems, its elegant representation of distance and direction is an indispensable tool in the innovative journey of flight technology.