Newton’s Second Law of Motion, often encapsulated in the elegant equation F=ma (Force equals mass times acceleration), stands as one of the most fundamental principles in classical physics. While seemingly abstract, its implications are profoundly practical, particularly in the realm of modern technology. For innovators in drone development, this law is not just a theoretical concept learned in a classroom; it is the bedrock upon which every aspect of flight, control, and autonomous operation is built. Understanding F=ma is not merely an academic exercise; it is essential for engineering the intelligent, agile, and reliable unmanned aerial vehicles (UAVs) that are transforming industries from logistics and agriculture to surveillance and entertainment.
In the dynamic world of drone technology and innovation, Newton’s Second Law dictates everything from how a drone takes off and maneuvers to how its sophisticated AI systems plan trajectories and react to environmental challenges. It’s the silent conductor orchestr of flight, providing the mathematical framework for propulsion, stabilization, and precise command execution. This article will delve into the critical role this foundational law plays in the continuous evolution of drone tech, exploring its direct application in autonomous flight, advanced control systems, and the relentless pursuit of superior performance and efficiency.

The Foundational Principle: F=ma in the Drone Ecosystem
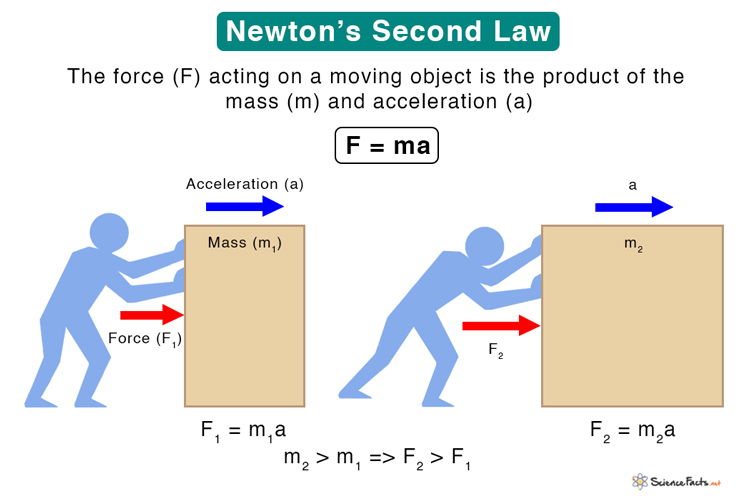
At its core, Newton’s Second Law states that the acceleration of an object is directly proportional to the net force acting upon it and inversely proportional to its mass. In simpler terms, to make something move faster or change direction (accelerate), you need to apply a force, and the heavier the object, the more force is required to achieve the same acceleration. This simple yet profound relationship is the starting point for all drone engineering and innovation. Without a precise understanding of how forces generate acceleration for a given mass, the complex choreography of multi-rotor flight would be impossible to design, let alone execute autonomously.
Deciphering Force, Mass, and Acceleration for Flight
Let’s break down the components within the context of a drone. “Mass” (m) refers to the total weight of the drone, including its frame, motors, batteries, payload, and any integrated sensors or cameras. This mass is a critical design parameter, directly influencing the amount of force needed for flight. The lighter the drone, the less force required to achieve desired maneuvers, translating to better agility and potentially longer flight times for a given power output.
“Force” (F) in a drone primarily comes from the thrust generated by its propellers. Each motor spins a propeller, pushing air downwards and, by Newton’s Third Law (action-reaction), propelling the drone upwards or in a desired direction. The sum of these individual propeller forces, adjusted for gravity and air resistance, constitutes the net force acting on the drone. Modern drone systems meticulously control the speed of each motor independently to vary these forces, allowing for precise control over pitch, roll, yaw, and altitude.
“Acceleration” (a) is the resulting change in the drone’s velocity (speed and direction). When a drone accelerates upwards, the net force is greater than gravity. When it hovers, the upward thrust perfectly balances gravity, resulting in zero net force and thus zero acceleration (constant velocity, in this case, zero). When it moves forward, the horizontal component of thrust generates forward acceleration. Understanding and manipulating these accelerations is what allows drones to perform complex flight paths, maintain stable positions, and navigate intricate environments.
From Propeller Thrust to Dynamic Maneuvers
The transformation of electrical energy into mechanical thrust is a marvel of engineering guided by F=ma. Each propeller acts as an airfoil, and its design (shape, pitch, diameter) directly influences the amount of lift and thrust it can generate for a given rotational speed. Drone designers spend countless hours optimizing propeller designs and motor specifications to achieve the best power-to-weight ratio, ensuring sufficient force generation to lift the drone and its payload, while also providing enough reserve power for dynamic maneuvers, gust resistance, and rapid acceleration.
For instance, when a drone needs to accelerate quickly to follow a fast-moving object in AI follow mode, its flight controller rapidly increases the thrust of all motors. To bank into a turn, it strategically reduces thrust on one side and increases it on the other, creating a torque that causes the drone to roll, and subsequently, a horizontal component of lift that induces centripetal acceleration, enabling the turn. Every subtle adjustment to the drone’s attitude and position is a direct application of generating specific forces to achieve desired accelerations relative to its mass. This real-time, iterative process of force application and acceleration measurement is what gives modern drones their remarkable agility and precision.
Newton’s 2nd Law in Autonomous Flight & Control Systems
The true innovation in drone technology lies not just in their ability to fly, but in their capacity for autonomous operation. Here, Newton’s Second Law moves from a design principle to an active computational element within the drone’s control algorithms. Autonomous systems must constantly predict and react, using F=ma as their underlying physics engine to understand how much force is needed to achieve a desired state, and equally importantly, what forces are acting upon the drone to cause deviations from that state.
Predictive Control and Trajectory Planning
Autonomous flight hinges on sophisticated trajectory planning. A drone doesn’t just “fly”; it computes a desired path, often in three-dimensional space, and then calculates the sequence of forces required to follow that path. This is where F=ma becomes critical for predictive control. If the drone’s AI determines it needs to reach a point X, Y, Z in a specific time, it must calculate the necessary accelerations over that duration. From these accelerations, and knowing its own mass and the mass of its payload, it can then compute the precise thrust adjustments required from each motor.
For tasks like mapping or remote sensing, precise flight paths are paramount. The drone’s flight controller, using F=ma, continuously estimates its current position and velocity, compares it to the desired trajectory, and applies correctional forces. This feedback loop is essential: measure current state, calculate error, determine required force (F=ma), apply force (adjust motor speed), observe new state, repeat. This high-frequency calculation ensures that the drone adheres to complex, pre-programmed flight plans with remarkable accuracy, even in dynamic environments.
Stabilization and Inertial Measurement Units (IMUs)
Maintaining stability is perhaps the most immediate and visible application of Newton’s 2nd Law in drone operation. A drone, by nature, is an inherently unstable platform. Without constant active correction, it would quickly tumble out of the sky. This is where the Inertial Measurement Unit (IMU) comes into play, a critical component containing accelerometers and gyroscopes.
Accelerometers directly measure the acceleration forces acting on the drone in three dimensions. Gyroscopes measure the rate of rotation. The flight controller uses this data to understand the drone’s current attitude (pitch, roll, yaw) and its acceleration in all axes. If the IMU detects an unintended roll (i.e., an uncommanded angular acceleration), the flight controller, armed with the knowledge of F=ma, immediately calculates the counter-forces needed to generate an opposing acceleration, bringing the drone back to a stable, level orientation. This happens hundreds, if not thousands, of times per second, creating the illusion of effortless stability, even in windy conditions. Without F=ma as the computational basis for these corrections, real-time stabilization would be impossible.
AI-Driven Flight: Learning and Adapting to Forces
The integration of artificial intelligence into drone flight takes the application of Newton’s 2nd Law to a new level. AI algorithms in features like “AI Follow Mode” or “Obstacle Avoidance” don’t just execute pre-programmed paths; they learn, adapt, and make real-time decisions based on sensor input and environmental changes.
For example, an AI follow drone needs to maintain a consistent distance and angle relative to a moving subject. This requires constantly calculating the subject’s velocity and acceleration, and then, using F=ma, determining the necessary forces to match the drone’s own velocity and acceleration to maintain the desired relative position. If the subject suddenly speeds up, the AI must quickly compute a larger required acceleration and, subsequently, a larger thrust. Similarly, in obstacle avoidance, if an object suddenly appears in the drone’s path, the AI uses F=ma to calculate the maximum safe braking force (negative acceleration) and the required forces for an evasive maneuver, ensuring collision avoidance while minimizing disruption to the mission. More advanced AI can even learn optimal force application strategies through reinforcement learning, improving efficiency and agility over time by experimenting with different thrust profiles to achieve desired accelerations under varying conditions.
Precision and Performance: Engineering Drones with F=ma
The ongoing quest for better drone performance – whether it’s longer flight times, greater payload capacity, faster speeds, or more precise control – is fundamentally a design challenge rooted in Newton’s Second Law. Every material choice, component selection, and structural design decision is ultimately an optimization problem involving mass and the forces required to accelerate it.
Optimizing Power-to-Weight Ratio for Efficiency
One of the most significant challenges in drone design is achieving an optimal power-to-weight ratio. To maximize flight time or payload capacity, engineers strive to minimize the drone’s mass while maximizing the efficiency of its propulsion system. A lighter frame, more energy-dense batteries, and efficient motors all contribute to reducing the ‘m’ in F=ma, meaning less ‘F’ (thrust) is required to overcome gravity and achieve desired accelerations. This translates directly into lower power consumption and extended endurance.
The careful selection of lightweight yet strong materials like carbon fiber composites, the miniaturization of electronics, and aerodynamic shaping are all directly aimed at this optimization. Every gram shaved off the drone’s mass means that the motors can work less hard, generate less heat, and consume less power for the same performance, thereby enhancing overall efficiency and extending mission capabilities.
Designing for Agility: Racing Drones and Cinematic Platforms
The agility of a drone is a direct manifestation of its ability to rapidly change its acceleration, which, by F=ma, means rapidly changing the net force acting upon it. Racing drones, built for extreme speed and maneuverability, are prime examples. They feature powerful motors, lightweight frames, and highly responsive control systems that allow pilots (or autonomous algorithms) to generate massive and rapid changes in thrust, enabling breathtaking accelerations, decelerations, and changes in direction. The design of these drones is a masterclass in minimizing mass and maximizing the instantaneous force generation capability of the propulsion system.
Similarly, cinematic drones, while not focused on speed, demand exceptional stability and precise, smooth movements to capture professional-grade footage. This requires very fine-tuned control over the forces that dictate acceleration. Sudden jerks or uncontrolled movements translate into shaky footage. Therefore, these drones are engineered with highly sensitive IMUs and robust control algorithms that use F=ma to apply extremely precise, minute corrections to maintain stable flight paths and smooth transitions, even when carrying heavy gimbal cameras.
The Impact of Payload on Flight Dynamics
The addition of a payload (camera, sensor package, delivery item) directly increases the ‘m’ in F=ma. This increase in mass has profound implications for a drone’s flight dynamics. A heavier drone requires more force to take off, hover, and maneuver. This means higher power consumption, reduced agility, and shorter flight times.
Drone designers must account for maximum payload capacities, designing propulsion systems (motors and propellers) that can generate sufficient thrust to lift the maximum intended mass while still providing a healthy margin for dynamic flight. Flight controllers also need to adjust their algorithms in real-time based on the detected payload mass. For instance, if a drone is carrying a heavy delivery, its AI must calculate that greater force inputs are required to achieve the same desired accelerations compared to an unladen flight. This dynamic adjustment is crucial for maintaining safe and effective operation across varying mission profiles.
Advanced Applications: Mapping, Sensing, and Beyond
The robust application of Newton’s 2nd Law extends directly into the specialized applications that define the cutting edge of drone innovation, from environmental monitoring to sophisticated data acquisition. The reliability and precision of these advanced tasks are deeply rooted in how well the drone’s systems leverage F=ma to control its physical presence in space.
Accurate Data Acquisition through Stable Platforms
For applications like high-resolution aerial mapping, 3D modeling, or infrastructure inspection, the quality of the data is directly dependent on the stability and precision of the drone platform. Any unwanted movement, vibration, or deviation from a planned flight path can introduce errors into the collected data, rendering it unusable or requiring costly re-flights.
Here, F=ma is continuously at work within the drone’s stabilization systems. By actively countering external forces (like wind gusts) and internal disturbances, the drone maintains a remarkably stable trajectory and attitude. This ensures that the onboard sensors, whether they are high-megapixel cameras for photogrammetry, LIDAR scanners for topographic mapping, or thermal cameras for energy audits, are kept perfectly steady. The ability of the drone’s control system to generate precise, opposing forces to maintain a zero net acceleration (or a very controlled, predictable one) is what allows for the collection of extremely accurate and consistent geospatial data, revolutionizing how we survey and understand our world.
Remote Sensing and Environmental Monitoring
Drones equipped with specialized remote sensing payloads (e.g., multispectral cameras for agriculture, gas sniffers for environmental compliance, or magnetometers for geological surveys) are transforming data collection in inaccessible or hazardous environments. The success of these missions relies entirely on the drone’s ability to fly precise patterns, maintain specific altitudes, and remain stable despite carrying delicate, often heavy, instrumentation.
The mission planner, informed by the drone’s F=ma parameters, calculates optimal flight speed and altitude to ensure proper sensor overlap and data resolution. During the mission, the drone’s control algorithms continuously monitor its actual position and attitude against the planned trajectory. If the drone encounters unexpected air currents, its IMU detects the resulting acceleration, and the flight controller rapidly applies the necessary forces to counteract these disturbances, ensuring the sensor payload remains in the ideal position for accurate data capture. This continuous, intelligent application of F=ma allows for consistent, repeatable data collection, which is vital for long-term environmental monitoring and trend analysis.
The Future: Smarter Drones, Powered by Fundamental Physics
Looking ahead, the evolution of drone technology will undoubtedly continue to push the boundaries of autonomy, intelligence, and application. Innovations like swarm intelligence, advanced human-drone interaction, and increasingly complex inspection or delivery tasks will all rely on ever more sophisticated implementations of Newton’s Second Law. As drones become more self-aware and capable of making complex decisions in dynamic environments, their internal models of the world will become even more dependent on accurately predicting and managing forces and accelerations. From designing micro-drones for intricate indoor navigation to developing heavy-lift platforms for urban air mobility, F=ma will remain the constant, foundational principle guiding every step of technological advancement.
In essence, Newton’s Second Law is not merely a physics equation but the fundamental algorithm embedded within every smart drone. It empowers engineers to design, pilots to control, and AI systems to autonomously navigate and interact with the physical world, making it the silent, indispensable force behind the innovation that continues to redefine the capabilities of unmanned aerial technology.