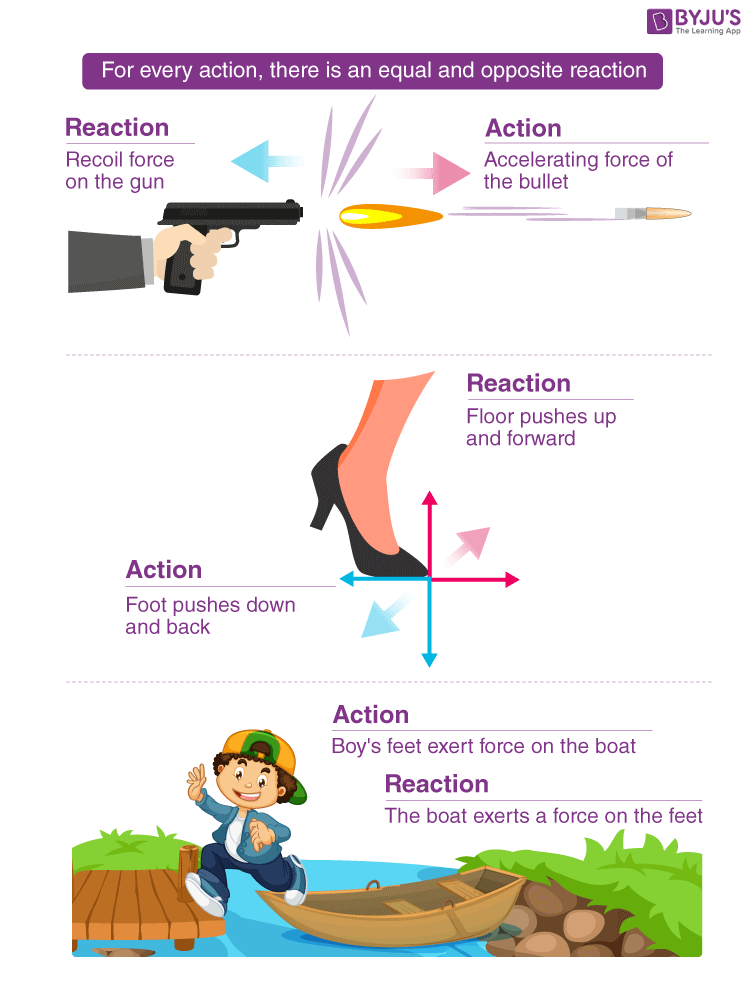
In the intricate world of drone technology, understanding fundamental physical principles is paramount to appreciating how these sophisticated aerial vehicles defy gravity and execute complex maneuvers. Among these principles, Newton’s Third Law of Motion stands out as the cornerstone of all drone flight. Stated simply, “For every action, there is an equal and opposite reaction.” This seemingly straightforward declaration forms the very bedrock upon which quadcopters, fixed-wing UAVs, and every other drone variant achieve lift, maintain stability, and navigate the skies. Without the precise and continuous application of this law, drones would remain grounded, inert pieces of hardware. Delving into its implications reveals the ingenious engineering behind these flying machines, from the furious whirl of their propellers to the subtle adjustments of their flight controllers.
The Fundamental Principle of Drone Flight
The ability of a drone to achieve and sustain flight is a direct and compelling demonstration of Newton’s Third Law. Unlike birds that flap wings or airplanes that rely on fixed-wing aerodynamics to generate lift through forward motion, multirotor drones primarily achieve lift by pushing air downwards. This interaction between the drone’s propellers and the surrounding air is the quintessential action-reaction pair at play.
Action-Reaction in Propeller Thrust
Each propeller on a drone acts as an airfoil, rotating at high speeds to displace a significant volume of air. As the propeller blades slice through the air, their angled surfaces push air molecules downwards. This downward expulsion of air constitutes the “action” force. Crucially, according to Newton’s Third Law, the air simultaneously exerts an “equal and opposite reaction” force upwards on the propeller. This upward force is precisely what we define as thrust. The sum of the thrust generated by all the propellers must be sufficient to overcome the drone’s total weight, including its frame, batteries, motors, cameras, and any payload, for it to lift off the ground. If the collective thrust exceeds the drone’s weight, it ascends; if it’s less, it descends. When thrust perfectly balances weight, the drone hovers in place, seemingly motionless against the forces of nature.
Lift Generation and Gravity’s Counter
The entire engineering marvel of a drone is geared towards harnessing this action-reaction principle efficiently. Drone designers meticulously select propeller shapes, sizes, and pitch angles, along with motor power and battery capacity, all to optimize the generation of this upward reaction force. The goal is to maximize the amount of air pushed downwards per unit of power consumed, thereby generating maximum lift to counteract the constant pull of gravity. Each motor-propeller combination is a miniature engine of Newton’s Third Law, continuously performing the action of pushing air and receiving the reaction of lift. Understanding this dynamic is crucial for appreciating why propeller damage, even minor nicks, can significantly impair a drone’s flight performance and stability. An inefficient “action” (less air displaced downwards) results in a reduced “reaction” (less lift), potentially leading to uncommanded descent or instability.
How Drones Achieve Stability and Maneuverability
While generating enough lift to take off is the first hurdle, the true sophistication of drone flight lies in its ability to maintain stability and execute precise maneuvers. This, too, is entirely dependent on the nuanced application of Newton’s Third Law. Unlike traditional aircraft with control surfaces like ailerons and rudders, multirotor drones achieve directional control by dynamically altering the thrust generated by individual propellers.
Differential Thrust for Control
Imagine a quadcopter with four propellers. To move forward, the drone needs to pitch its nose down slightly. This is achieved by subtly decreasing the thrust from the rear propellers while simultaneously increasing thrust from the front propellers. The decreased rear thrust causes the rear of the drone to drop (less upward reaction force), and the increased front thrust causes the front of the drone to lift (more upward reaction force). The resultant imbalance of forces creates a rotational moment, tilting the drone forward. Once tilted, the collective thrust, still pushing upwards relative to the drone’s body, now has a horizontal component, propelling the drone forward. This precise manipulation of individual propeller thrusts – creating controlled imbalances in action-reaction pairs – is fundamental to all drone movements.
Pitch, Roll, and Yaw Explained Through Action-Reaction
- Pitch: As described, tilting the drone forward or backward by adjusting the thrust of the front and rear propeller pairs. Decreasing thrust from the front pair relative to the rear pair will cause the drone to pitch backward, and vice-versa.
- Roll: Tilting the drone sideways (left or right) is achieved by adjusting the thrust of the side propeller pairs. Decreasing thrust from the left pair relative to the right pair will cause the drone to roll to the left, and vice-versa.
- Yaw: Rotating the drone around its vertical axis (turning left or right without tilting) is more complex but still rooted in Newton’s Third Law, specifically concerning the torque generated by the propellers. On most quadcopters, propellers spin in alternating directions (e.g., diagonal pairs spin clockwise, the other diagonal pair counter-clockwise). When all propellers spin at equal speeds, the net torque is zero, keeping the drone stable. To yaw, the flight controller slightly increases the speed of the propellers spinning in one direction while decreasing the speed of those spinning in the opposite direction. This creates a net torque imbalance, causing the drone to rotate. The faster-spinning propellers push more air downwards (greater action), and as a reaction, the drone experiences a rotational force in the opposite direction of the propeller’s spin. This differential in rotational “reaction” forces allows the drone to pivot left or right.
These constant, micro-adjustments in thrust, orchestrated by the drone’s flight controller, exemplify the dynamic application of Newton’s Third Law. Every movement, every stabilization effort, is a continuous dance of action and reaction.
Designing for Efficiency and Performance
The practical implications of Newton’s Third Law extend far beyond basic flight principles, deeply influencing the design and engineering choices for modern drones. To achieve longer flight times, greater payloads, and enhanced performance, engineers must meticulously consider how to optimize the action-reaction cycle.
Aerodynamics and Propeller Design
Propeller design is a critical area where Newton’s Third Law directly dictates efficiency. The shape, chord, twist, and surface finish of a propeller blade are all engineered to push air downwards with maximum efficiency and minimum energy expenditure. A well-designed propeller creates a powerful “action” force (downward airflow) without inducing excessive drag or turbulence, thus yielding a strong “reaction” (upward thrust) for a given motor power. Material science also plays a role; propellers must be rigid enough to maintain their shape under load, ensuring consistent air displacement, yet light enough not to add unnecessary weight. The number of blades and their sweep also impacts how efficiently air is pushed and how much acoustic energy (noise) is generated, which is another byproduct of the action-reaction of air displacement.
Balancing Forces for Optimal Flight
The drone’s entire airframe is a testament to the need to balance forces. The weight distribution, the placement of motors, batteries, and sensors – all are carefully considered to ensure that the center of gravity aligns optimally with the collective thrust vector. An off-center center of gravity would require continuous, compensatory differential thrust from the propellers, reducing efficiency and increasing strain on motors and batteries. Furthermore, the structural integrity of the drone must withstand the reaction forces generated by the propellers, ensuring that the frame itself doesn’t deform or vibrate excessively, which could lead to instability or even catastrophic failure. This continuous interplay between the downward action of air by propellers and the upward reaction force determines not only if a drone flies but how well, how long, and how stably it can perform.
Beyond Basic Flight: Advanced Drone Dynamics
Newton’s Third Law continues to be a central theme even in more advanced drone operations, influencing aspects like gust resistance, autonomous flight, and flight envelope expansion. The continuous “action-reaction” dialogue between the drone and its environment is not static but dynamically managed.
Gust Resistance and Dynamic Stability
When a drone encounters a sudden gust of wind, an external force acts upon it, threatening its stability. In response, the drone’s flight controller rapidly adjusts the speeds of individual motors, altering the thrust (action) from its propellers. This creates new, counteracting reaction forces to push back against the wind, maintaining the drone’s desired position and orientation. High-performance flight controllers, combined with sophisticated sensors, continuously measure these external forces and calculate the necessary differential thrust adjustments in real-time, all in service of maintaining the action-reaction equilibrium that defines stable flight. Without this rapid, dynamic application of Newton’s Third Law, drones would be helpless against even a light breeze.

The Third Law in Autonomous Operations
Even in autonomous flight, mapping, or remote sensing missions, the underlying physics remains constant. The drone’s ability to follow a pre-programmed path, maintain altitude, or track a target relies on the precise and consistent generation of forces via Newton’s Third Law. AI follow modes, for instance, calculate the relative position and trajectory of a subject and then translate these into required drone movements. These movements are then executed by the flight controller commanding the motors to generate the specific action-reaction forces needed for pitching, rolling, or yawing the drone into the correct orientation and velocity. From the simplest toy drone to the most advanced industrial UAV, Newton’s Third Law isn’t just a theoretical concept; it is the living, breathing essence of drone flight, perpetually dictating the interaction between the machine, the air, and the forces that govern our physical world.