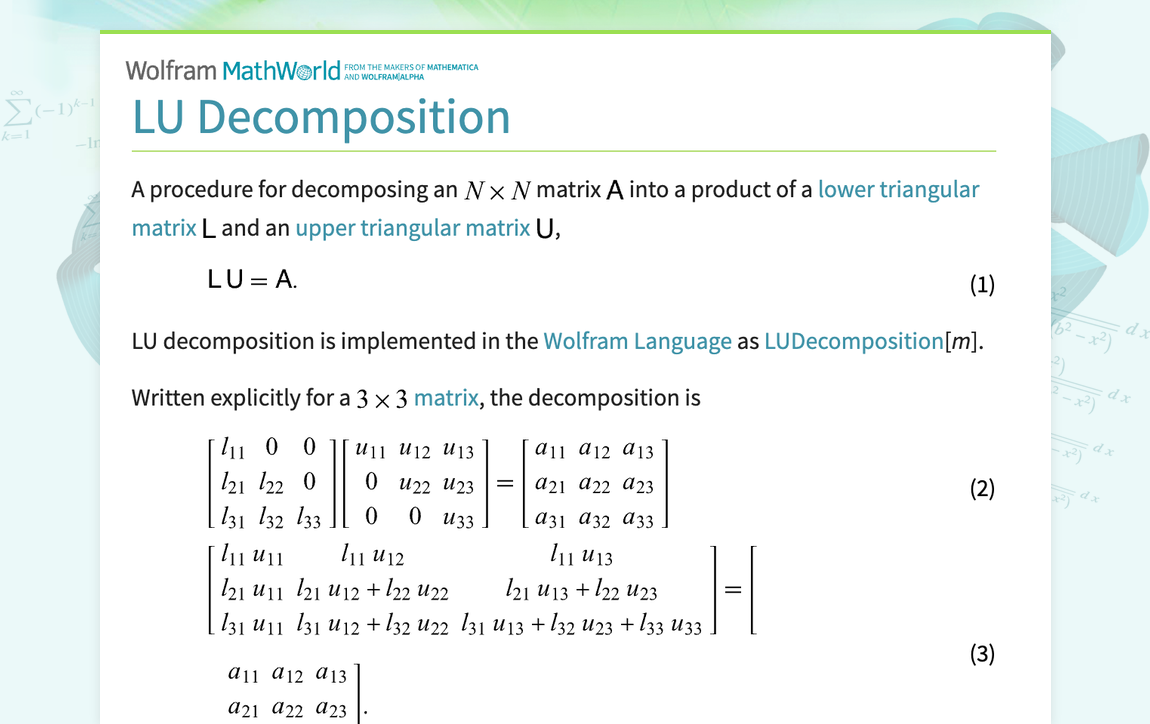
LU decomposition, or Lower-Upper decomposition, is a fundamental matrix factorization technique in linear algebra, playing a pivotal role in the computational backbone of modern drone technology. At its core, LU decomposition breaks down a square matrix (A) into the product of a lower triangular matrix (L) and an upper triangular matrix (U), such that A = LU. This seemingly abstract mathematical operation underpins a vast array of sophisticated algorithms crucial for autonomous flight, advanced mapping, remote sensing, and artificial intelligence in drones, categorizing it firmly within the realm of “Tech & Innovation.”
The significance of LU decomposition lies in its ability to efficiently solve systems of linear equations, compute matrix inverses, and determine determinants. In the context of drones, where real-time decision-making, precise navigation, and rapid data processing are paramount, the computational efficiency and numerical stability offered by this method are invaluable. It enables complex mathematical models to be processed swiftly and reliably, even on the resource-constrained onboard computers of UAVs, driving the frontier of what drones can achieve autonomously.
The Computational Engine for Drone Intelligence
Modern drones are essentially flying computers, equipped with an array of sensors, sophisticated processing units, and intricate control systems. The intelligence that powers autonomous flight, precise navigation, and complex data analysis relies heavily on solving systems of linear equations. Whether it’s estimating a drone’s position, calculating optimal flight paths, or processing vast amounts of sensor data, these tasks often translate into mathematical problems that can be efficiently tackled using matrix operations. LU decomposition provides a robust and computationally efficient method for handling these challenges.
Understanding Linear Systems in Drone Operations
Every aspect of a drone’s autonomous operation involves solving complex mathematical problems. For instance, determining a drone’s precise location requires combining data from multiple sensors—GPS, accelerometers, gyroscopes, magnetometers, and barometers. This sensor fusion process often involves Kalman filters or extended Kalman filters, which rely on solving systems of linear equations to estimate the drone’s state (position, velocity, orientation) and minimize uncertainty. The coefficients in these equations are derived from the physical models of motion and sensor characteristics.
Similarly, planning an optimal trajectory for a drone to navigate a complex environment, avoid obstacles, or execute a specific mission involves formulating and solving optimization problems, which frequently boil down to linear systems or sequences of linear systems. These systems can be large and computationally intensive, demanding efficient solution techniques. Without methods like LU decomposition, real-time decision-making and precise control, which are hallmarks of advanced drone technology, would be significantly hampered.
Why Matrix Decomposition Matters for Efficiency
The direct inversion of a matrix, while conceptually straightforward, is computationally very expensive, especially for large matrices. When dealing with systems of linear equations (Ax = b), instead of calculating A⁻¹ to find x = A⁻¹b, LU decomposition offers a more stable and efficient approach. By decomposing A into L and U, solving Ax = b becomes a two-step process: first, solve Ly = b for y (forward substitution), and then solve Ux = y for x (backward substitution). Both forward and backward substitution are significantly faster and numerically more stable than matrix inversion, particularly for large systems.
This computational advantage is critical for drones. Onboard processors have finite power and memory. Efficient algorithms allow for faster execution, lower power consumption, and the ability to handle more complex tasks simultaneously. For applications like real-time collision avoidance or high-frequency stabilization, delays of even milliseconds can have significant consequences. LU decomposition provides the underlying mathematical framework to ensure that these critical calculations are performed with the necessary speed and accuracy, directly contributing to the reliability and performance of innovative drone features.
LU Decomposition in Autonomous Flight Systems
Autonomous flight represents the pinnacle of drone innovation, enabling UAVs to navigate, make decisions, and execute missions without direct human intervention. The reliability and precision of these systems are directly influenced by the underlying mathematical algorithms, where LU decomposition plays a crucial role in enhancing performance and safety.
Real-time Navigation and State Estimation
One of the most vital aspects of autonomous flight is accurate real-time navigation and state estimation. Drones must continuously know their precise position, velocity, and orientation to maintain stable flight, follow predefined paths, and avoid dynamic obstacles. As mentioned, Kalman filters and their variants are widely used for this purpose. These filters recursively estimate the state of a system based on noisy sensor measurements. Each step of the Kalman filter involves solving a system of linear equations, often related to covariance matrices, which quantify the uncertainty in the state estimates.
LU decomposition accelerates these calculations by providing an efficient means to solve these linear systems. When the system needs to process a constant stream of sensor data at high frequencies (e.g., hundreds of times per second), the ability to quickly and stably perform these matrix operations is indispensable. This ensures that the drone’s internal model of its environment and its own state remains accurate and responsive, leading to smoother, more reliable autonomous flight and more precise control in challenging conditions.
Trajectory Optimization and Path Planning

For drones engaged in complex missions—such as inspecting infrastructure, delivering packages, or performing search and rescue operations—intelligent path planning and trajectory optimization are essential. These tasks involve calculating the most efficient, safest, or fastest route, often subject to various constraints like no-fly zones, obstacle locations, payload limitations, and energy consumption. Mathematical optimization techniques, often involving quadratic programming or other forms of convex optimization, are employed to solve these problems.
Many optimization algorithms require iteratively solving systems of linear equations to find the optimal solution. For example, interior-point methods, a class of algorithms used for solving complex optimization problems, frequently rely on solving large, sparse linear systems. LU decomposition, particularly specialized sparse LU decomposition techniques, becomes critical here. It enables these complex optimization problems to be solved efficiently, allowing drones to adapt their paths in real-time to unforeseen events or dynamic environments, pushing the boundaries of autonomous operational capability.
Powering Advanced Mapping and Remote Sensing
The applications of drones in mapping and remote sensing have revolutionized industries from agriculture to construction and environmental monitoring. These applications generate vast quantities of spatial data, requiring sophisticated processing techniques where LU decomposition contributes significantly to accuracy and efficiency.
Georeferencing and Photogrammetry
Photogrammetry, the science of making measurements from photographs, is a cornerstone of drone-based mapping. Drones capture overlapping images of an area, and software uses these images to create detailed 2D maps and 3D models. A crucial step in this process is georeferencing, which involves accurately aligning these images with real-world coordinates. This requires solving large systems of linear equations to determine the precise camera positions and orientations for each image, as well as the 3D coordinates of points in the environment. Bundle adjustment, a common photogrammetric optimization technique, minimizes reprojection errors and relies heavily on solving large, sparse linear systems.
LU decomposition is instrumental in solving these linear systems efficiently. For large-scale mapping projects involving thousands of images and millions of 3D points, the matrices involved can be enormous. The computational speed provided by LU decomposition, particularly when optimized for sparse matrices (matrices with many zero entries, common in photogrammetry), allows for the rapid and accurate reconstruction of environments, producing highly precise maps and models that are essential for decision-making in various sectors.
Data Processing for Environmental Analysis
Remote sensing drones collect data across various spectral bands (visible, infrared, thermal), providing insights into vegetation health, water quality, geological formations, and more. Processing this multi-spectral or hyperspectral data often involves complex algorithms for calibration, atmospheric correction, feature extraction, and classification. Many of these algorithms utilize statistical methods and machine learning techniques that involve solving linear systems or performing matrix inversions.
For instance, in multivariate statistical analysis or specific machine learning models (like least squares regression or principal component analysis used for dimensionality reduction), LU decomposition provides the necessary computational primitive for efficient matrix operations. This enables faster processing of large environmental datasets, leading to quicker insights and more timely interventions in applications such as precision agriculture or disaster response. The ability to rapidly process and interpret sensor data on or near the drone enhances the “innovation” aspect by allowing for on-the-fly analysis and adaptive mission planning.
Enhancing AI and Machine Learning in Drone Technology
Artificial intelligence (AI) and machine learning (ML) are transforming drone capabilities, enabling features like AI follow mode, intelligent object detection, and predictive maintenance. These advanced functionalities are deeply rooted in computational mathematics, where LU decomposition provides foundational support for various algorithms.
Machine Vision and Object Recognition
Drones equipped with machine vision capabilities can identify objects, track targets, and understand their environment. Algorithms for object detection (e.g., YOLO, R-CNN) and image processing rely on complex neural networks or traditional computer vision techniques. While deep learning models primarily use gradient-based optimization, many pre-processing steps, feature engineering techniques, or classical machine learning components within a larger AI system can leverage LU decomposition. For example, in certain statistical models or optimization routines used for calibrating camera parameters, or in specific types of kernel methods, solving linear systems is a common requirement.
Moreover, the training of some neural network architectures or the fine-tuning of existing models might involve linear system solvers in certain layers or for specific optimization steps. Efficiently tackling these underlying linear algebra problems, even if indirectly, contributes to the overall speed and performance of AI-powered drone systems, making them more robust and capable in real-world scenarios.

Predictive Analytics and Anomaly Detection
Drones are increasingly being used for predictive analytics and anomaly detection—for instance, identifying failing infrastructure components, detecting crop diseases, or flagging unusual patterns in surveillance footage. These applications often involve building statistical models from collected data to forecast future states or identify deviations from normal behavior. Many such models, particularly those based on linear regression, Bayesian inference, or Gaussian processes, require solving systems of linear equations to determine model parameters or probabilities.
LU decomposition provides the efficient and numerically stable means to perform these calculations. For instance, in Bayesian inference, calculating posterior distributions often involves inverting or factorizing covariance matrices, where LU decomposition offers a reliable alternative. The ability to rapidly build and update these predictive models on or near the drone facilitates real-time anomaly detection, enabling proactive decision-making and enhancing the overall intelligence and utility of autonomous drone operations. This computational efficiency is key to moving beyond simple data collection to true “Tech & Innovation” in actionable insights.