The Core of Computing: Understanding the Kernel
In the complex tapestry of modern computing, the operating system (OS) serves as the foundational layer that manages all hardware and software resources. At the very heart of this operating system lies the kernel – a privileged piece of software responsible for mediating access to the computer’s processor, memory, and input/output devices. It’s the ultimate arbiter, ensuring that different applications can share resources without conflict and that the hardware functions optimally. For anyone deeply involved in drone technology and innovation, understanding the kernel is not merely an academic exercise; it’s crucial for comprehending the performance characteristics of the systems that power mission planning, data processing, and advanced AI-driven drone operations.
The kernel operates in a highly privileged mode, often referred to as kernel mode, allowing it direct access to hardware. User-level applications, in contrast, run in user mode and must request services from the kernel to interact with hardware. This clear separation of concerns enhances system stability and security. When an application needs to read from a disk, send data over a network, or allocate memory, it doesn’t do so directly; it issues a system call, which is then handled by the kernel. This architectural design is fundamental to how everything from a simple word processor to sophisticated photogrammetry software functions.
In the context of the drone ecosystem, while the drones themselves often run highly specialized, real-time operating systems (RTOS) on embedded flight controllers, the ground stations and powerful workstations used by drone professionals rely on general-purpose operating systems like macOS, Windows, or Linux. These ground systems are where mission parameters are programmed, telemetry data is received and analyzed, and the vast amounts of data captured by drones are processed into actionable intelligence. The efficiency and stability of these ground systems, largely dictated by their respective kernels, directly impact the success and innovation potential of drone-based projects. Without a robust and efficiently managed kernel, even the most powerful hardware can struggle to deliver consistent performance, especially under the strenuous demands of tasks like 3D model generation or complex AI simulations.
The Operating System’s Foundation
The kernel’s responsibilities are vast and encompass several critical areas. Firstly, it manages the CPU, determining which processes run and for how long through a process scheduler. This is vital for multitasking, allowing multiple applications to appear to run simultaneously. Secondly, it handles memory management, allocating memory to different programs and preventing them from overwriting each other’s data or accessing restricted areas. Virtual memory, a technique that allows the OS to use disk space as an extension of RAM, is also a kernel-level feature, crucial for handling large datasets common in drone mapping and remote sensing.
Beyond CPU and memory, the kernel also manages input/output (I/O) operations, controlling how data moves between the CPU, memory, and peripheral devices like network cards, storage drives, and USB ports. Device drivers, which are often part of the kernel or loaded dynamically, facilitate this communication. For drone professionals, efficient I/O is paramount when transferring gigabytes or terabytes of imagery and sensor data from drone storage to a workstation for processing. Furthermore, the kernel is responsible for process management, including creating, terminating, and synchronizing processes, and inter-process communication, enabling different parts of an application or different applications to share data and coordinate tasks. All these foundational services provided by the kernel are the bedrock upon which all advanced drone applications and innovations are built.
Role in Drone Ecosystems (Ground Stations, Data Processing)
While the term “kernel_task” specifically refers to a macOS process, the underlying concept of the kernel’s critical role extends universally to the computing platforms used throughout the drone ecosystem. Ground control stations (GCS) and data processing workstations are prime examples where kernel efficiency is paramount. These systems often run sophisticated software for flight planning, real-time telemetry display, geographic information systems (GIS) integration, and post-processing.
For instance, high-resolution photogrammetry involves stitching together thousands of images into accurate 2D maps and 3D models. This process is intensely CPU, memory, and I/O bound. The kernel must efficiently manage the allocation of these resources to the photogrammetry software, ensuring that CPU cores are fully utilized, RAM is correctly allocated, and data can be read from SSDs and written back at maximum speeds. Any inefficiency at the kernel level can translate into significantly longer processing times, impacting project deadlines and resource costs. Similarly, applications involving AI and machine learning for object detection, autonomous navigation, or predictive maintenance from drone data require immense computational power. The kernel’s ability to orchestrate these demanding workloads, including managing GPU resources (often via kernel modules), directly influences the performance and responsiveness of these innovative drone technologies.
Deciphering kernel_task in Practice
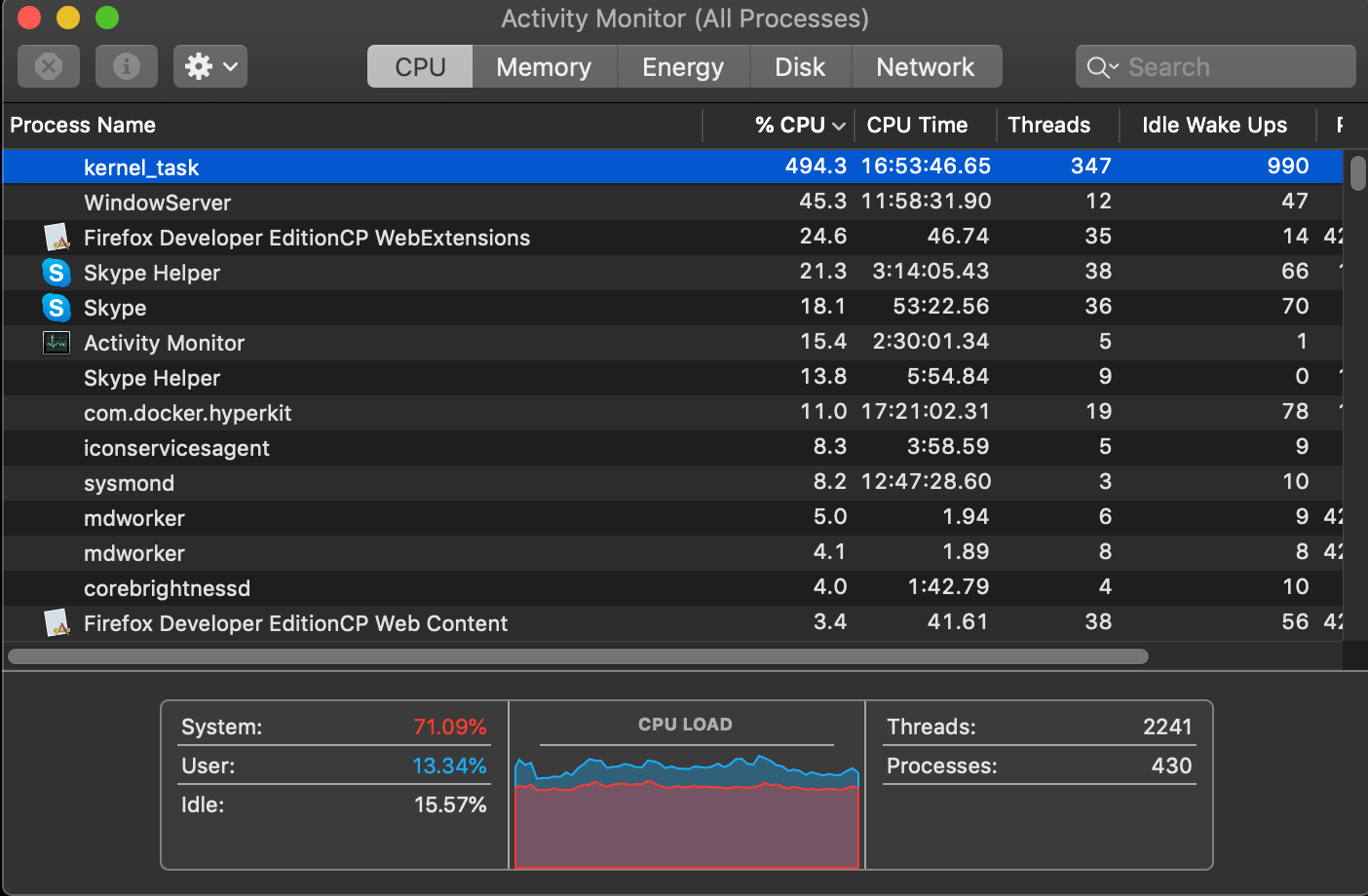
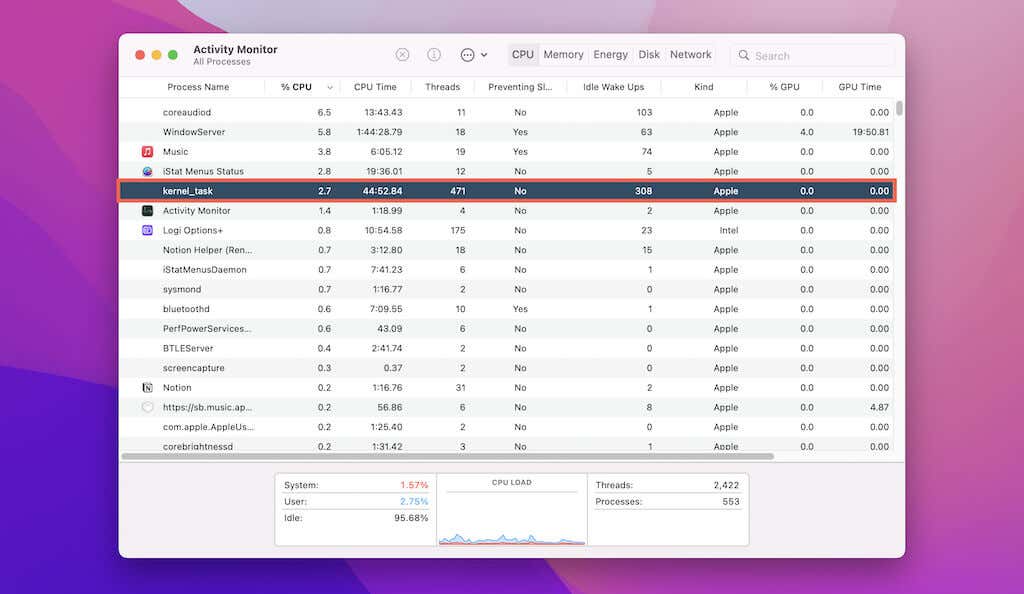
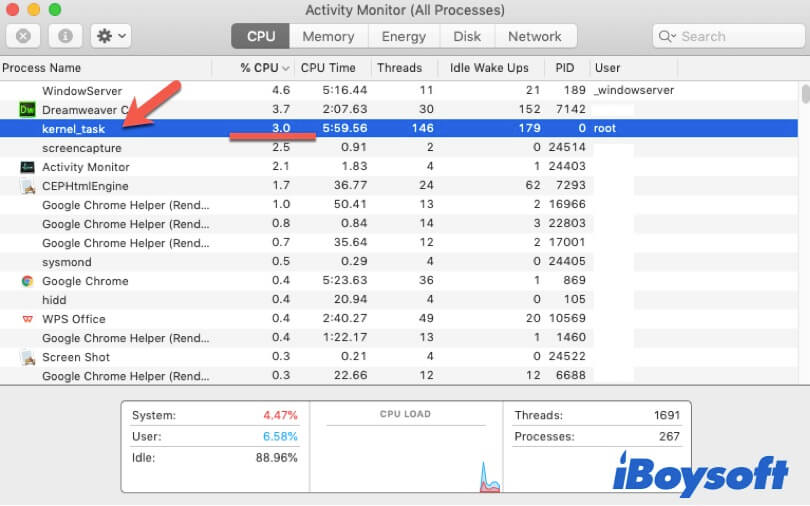
On macOS systems, kernel_task is a system process that often appears in Activity Monitor. Contrary to what its CPU percentage might suggest, kernel_task is not an application actively consuming vast amounts of processing power to perform a task in the traditional sense. Instead, it’s a vital internal process used by the macOS kernel to manage system resources, regulate hardware temperatures, and ensure the overall stability and responsiveness of the operating system. When you see kernel_task showing a high CPU usage, it usually indicates that the kernel is throttling the CPU to prevent overheating, rather than actively using the CPU for its own computations. This distinction is critical for understanding and troubleshooting system performance issues, especially for drone professionals who rely on their macOS machines for critical operations.
The kernel itself doesn’t inherently need a process to represent its core functions, as it runs in a protected memory space. However, kernel_task is essentially a placeholder process that handles various kernel-level duties, particularly those related to system health and hardware management. It acts as a safety mechanism, ensuring that the system remains stable even under heavy load or when hardware components (like the CPU or GPU) are nearing their thermal limits. Without such a mechanism, an overheating component could lead to instability, crashes, or even permanent hardware damage. Therefore, rather than being a problem itself, a high kernel_task CPU usage is often a symptom that the system is trying to mitigate another underlying issue, typically related to heat generation or resource contention.
More Than Just a Process: System Management
The functions attributed to kernel_task are multifaceted. Beyond thermal management, it encompasses various system-level operations. These include:
- Hardware Abstraction: Facilitating communication between software and hardware components, ensuring compatibility and stable operation.
- Power Management: Regulating power consumption across components to balance performance and battery life, relevant for portable ground control stations.
- Interrupt Handling: Managing interrupts generated by hardware devices, ensuring that the CPU responds appropriately to events.
- Security Features: Implementing various security protocols and sandboxing mechanisms to protect the system from malicious software.
- Virtual Memory Swapping: Handling the movement of data between RAM and disk when physical memory is exhausted.
For drone professionals, understanding kernel_task means recognizing that peak performance in demanding applications like video rendering (from drone footage), complex simulation, or large-scale photogrammetry processing requires a system that is not just powerful but also running cool and stable. If the system frequently enters a state where kernel_task is elevated, it suggests that the hardware is consistently under thermal stress, which can lead to reduced performance over time as the CPU and GPU are deliberately slowed down to prevent damage.
Why kernel_task Matters for Drone Professionals (Resource Allocation, Performance)
The performance of a ground station or a data processing workstation directly correlates with the efficiency and reliability of drone operations. For drone professionals, kernel_task is an indicator that can reveal underlying system health and impact mission-critical tasks. When kernel_task consumes a significant portion of CPU cycles, it implies that the kernel is actively intervening to manage hardware, likely due to heat. This intervention can directly translate into:
- Slower Processing Times: Photogrammetry software, video encoders, or AI model training will take longer to complete because the CPU is not operating at its full potential.
- Laggy Ground Control: Real-time data feeds, map rendering, and control inputs on the GCS might experience delays or reduced responsiveness, potentially impacting flight safety or precision.
- Reduced Software Responsiveness: Any application interacting heavily with system resources, which is common for drone-related software, will feel sluggish and less efficient.
- Impact on Development and Simulation: For developers or researchers working on new drone algorithms or simulations, a throttled CPU can drastically extend iteration cycles and slow down innovation.
Effectively, a high kernel_task value is a red flag signaling that the computing environment is not optimal for resource-intensive drone tasks. It prompts a need to investigate factors like ambient temperature, airflow, background processes, or even potential hardware issues. Optimizing the computing environment to minimize unnecessary heat generation or resource contention becomes paramount for maintaining the high performance and reliability demanded by advanced drone technology.
Performance Implications for Advanced Drone Operations
The performance of the underlying computing hardware and software, heavily influenced by the kernel, directly dictates the efficiency and success of advanced drone operations. Whether it’s processing gigabytes of imagery, running complex simulations for autonomous flight paths, or deploying AI models for real-time analysis, these tasks demand peak system performance. When the kernel, through mechanisms like kernel_task, indicates stress or actively throttles resources, it has tangible, negative consequences across the entire workflow. For drone innovation, where rapid iteration and precise data handling are crucial, such slowdowns can be detrimental.
The ability to process data quickly and reliably is not just a convenience; it’s a competitive advantage and often a operational necessity. Imagine a scenario where a drone has collected critical data for an emergency response or a time-sensitive construction project. Delays in processing this data due to an inefficient or thermally constrained system can have significant financial and safety implications. The kernel’s role in resource orchestration ensures that these high-stakes computations can proceed unhindered, allowing drone professionals to extract maximum value from their aerial platforms.
Impact on Data Processing and Photogrammetry
Drone-based data collection for photogrammetry, LiDAR scanning, and multispectral analysis generates massive datasets. Processing these datasets into actionable 2D maps, 3D models, or agricultural health reports is extremely computationally intensive. Modern photogrammetry software leverages multiple CPU cores, vast amounts of RAM, and often dedicated GPUs to perform complex calculations involving image alignment, point cloud generation, and mesh creation.
A healthy kernel environment ensures that these resources are fully utilized. If kernel_task is consistently high on a macOS machine, or if a Linux or Windows kernel is struggling to manage resources, it directly impedes the performance of this software. CPU cores might be throttled, memory access could be slowed down, and I/O operations (reading raw images and writing processed models) could become bottlenecks. The result is significantly increased processing times, potentially turning a several-hour task into an all-day or multi-day ordeal. This impacts project timelines, client deliverables, and the overall cost-effectiveness of drone services. Furthermore, reduced system stability due to thermal issues, managed by the kernel, can lead to application crashes, requiring re-running long computations and leading to data loss and frustration.
Ensuring Smooth Ground Control and Mission Planning
While heavy data processing often occurs after a flight, the ground control station (GCS) is critical during the flight. Modern GCS software goes beyond simple joystick control; it integrates real-time telemetry, live video feeds, dynamic mission planning, and often augmented reality overlays. These applications require a responsive operating system to provide accurate, up-to-date information to the pilot.
A kernel under stress can introduce latency and unresponsiveness into the GCS interface. Delays in rendering maps, updating drone positions, or relaying control commands can be dangerous, especially in complex environments or during autonomous flights. For example, if a pilot needs to quickly adjust a flight path to avoid an unexpected obstacle, a laggy GCS due to system-level thermal management (as indicated by high kernel_task) could have serious consequences. For autonomous flight systems, the ground station might be executing complex algorithms for path optimization or real-time obstacle avoidance based on data streamed from the drone. A stable and high-performing kernel is essential to execute these algorithms efficiently and relay critical commands without delay, ensuring the safety and success of the mission.
The Role in AI and Machine Learning Workflows
The forefront of drone innovation lies in artificial intelligence and machine learning. From AI-powered object detection in aerial imagery to autonomous decision-making for drone fleets, these applications are inherently resource-intensive. Training machine learning models often requires dedicated GPUs and immense CPU power for data pre-processing and model evaluation. Deploying these models for real-time inference (e.g., detecting anomalies in infrastructure during a flight) also demands significant computational resources.
The kernel plays a pivotal role in these AI/ML workflows by:
- GPU Orchestration: Managing access to powerful GPUs, allocating their resources to AI model training or inference tasks.
- Memory Management: Handling the large memory footprints of AI datasets and models, ensuring efficient swapping if physical RAM is exhausted.
- Process Scheduling: Prioritizing AI-related computations to ensure they receive sufficient CPU cycles.
- Hardware Interface: Providing a stable interface for AI frameworks (like TensorFlow or PyTorch) to interact with underlying hardware accelerators.
If the kernel is struggling (e.g., due to overheating, manifesting as high kernel_task), AI model training times can increase dramatically, hindering research and development cycles. Real-time inference, critical for autonomous functions, could suffer from latency, making AI-driven decisions less timely or reliable. For drone professionals pushing the boundaries of autonomous flight, predictive analytics, and smart sensing, an optimized and stable kernel environment is not just an advantage—it’s a prerequisite for meaningful innovation.
Optimizing Your Environment for Drone Tech & Innovation
Achieving peak performance for demanding drone-related tasks requires more than just powerful hardware; it necessitates an optimized and stable computing environment. Understanding how the kernel operates and specifically what kernel_task signifies on macOS systems is the first step towards maintaining this optimal state. Proactive system management, informed hardware choices, and diligent software practices are essential to prevent performance bottlenecks and ensure the reliability critical for advanced drone technology. By actively managing these aspects, drone professionals can maximize productivity, accelerate innovation, and safeguard their valuable data and operations.
Optimizing your computing environment is an ongoing process, not a one-time fix. As drone technology evolves and the computational demands increase, so too must the attention paid to the health and efficiency of the underlying systems. This holistic approach to system management ensures that the powerful capabilities of modern drones can be fully realized through robust and responsive ground support systems.
Identifying and Addressing High kernel_task Usage
On macOS, a persistently high kernel_task CPU usage is usually a symptom of thermal throttling. To address this, drone professionals should:
- Monitor Temperatures: Use third-party tools (e.g., Macs Fan Control, iStat Menus) to monitor CPU and GPU temperatures. High temperatures are the direct cause of
kernel_task‘s throttling. - Improve Airflow: Ensure the computer is placed on a flat, hard surface, not on soft furnishings that can block vents. Consider a laptop stand with built-in cooling fans for sustained heavy workloads.
- Clean Vents: Dust accumulation inside the computer can severely impede cooling. Regular cleaning of fan vents can significantly improve thermal performance.
- Reduce Ambient Temperature: Operate the computer in a cooler room if possible. Direct sunlight or a hot environment will exacerbate thermal issues.
- Identify Resource-Intensive Apps: Use Activity Monitor to identify other applications that might be consuming excessive CPU or GPU resources, contributing to overall system heat. Close unnecessary applications during critical processing tasks.
- Check for Hardware Issues: In rare cases, a faulty sensor or component could cause the system to misreport temperatures or trigger throttling unnecessarily. While less common, it’s worth considering if all other solutions fail.
- Software Updates: Ensure macOS is up to date, as updates often include thermal management and driver improvements.
For non-macOS systems (Linux/Windows), while kernel_task isn’t a direct equivalent, similar principles apply. Monitoring CPU/GPU temperatures, ensuring adequate cooling, and managing background processes are universal best practices for preventing kernel-level performance degradation.
Hardware and Software Synergies
Optimal performance in drone tech & innovation workflows stems from a harmonious synergy between hardware and software.
- Powerful Processors and Ample RAM: Invest in multi-core CPUs (e.g., Intel i9, Xeon, AMD Ryzen Threadripper) and sufficient RAM (32GB, 64GB, or more) for photogrammetry, video editing, and AI model training. This reduces the likelihood of the kernel needing to heavily rely on slower virtual memory or throttling due to resource starvation.
- Dedicated GPUs: For AI/ML, 3D rendering, and certain photogrammetry tasks, a powerful dedicated GPU (e.g., NVIDIA GeForce RTX or Quadro, AMD Radeon Pro) is indispensable. Ensure compatible drivers are installed and up to date, as these often include kernel-level optimizations.
- Fast Storage: NVMe SSDs are crucial for handling large drone datasets. The kernel manages I/O, and faster drives mean less waiting time for data access, reducing overall system load.
- Operating System Choice: While macOS is popular, Windows and Linux often offer greater hardware compatibility and driver support for specialized hardware like certain GPUs or capture cards. Linux, especially, provides a highly customizable kernel that can be fine-tuned for specific tasks.
- Optimized Software: Use drone-specific software that is well-optimized for multi-core processing and GPU acceleration. Regularly update these applications to leverage the latest performance improvements and bug fixes.
Proactive System Maintenance for Reliability
Reliability is paramount in drone operations, where system failure can lead to significant financial losses or even safety hazards. Proactive system maintenance, guided by an understanding of the kernel’s role, ensures this reliability:
- Regular Backups: Implement robust backup strategies for all drone data and processing outputs. Even an optimized system can experience unforeseen failures.
- Driver Management: Keep all device drivers (especially for GPU, network, and storage controllers) up to date. Drivers are essentially kernel modules that enable hardware communication, and outdated drivers can lead to instability or performance issues.
- Disk Health and Defragmentation (if applicable): Ensure storage drives are healthy and have sufficient free space. While SSDs don’t need defragmentation, traditional HDDs benefit from it to maintain I/O performance.
- Network Stability: For real-time telemetry or cloud-based processing, a stable and fast network connection is crucial. The kernel manages network interfaces, and a poorly configured or unreliable network can cause significant bottlenecks.
- Security Practices: Maintain up-to-date antivirus software and strong cybersecurity practices. Malicious software can consume system resources, generate heat, and compromise kernel integrity, leading to performance issues and data breaches.
By adopting these comprehensive optimization and maintenance strategies, drone professionals can create a robust and high-performing computing environment that not only keeps kernel_task in check but also empowers them to fully harness the potential of advanced drone technology and drive innovation forward.