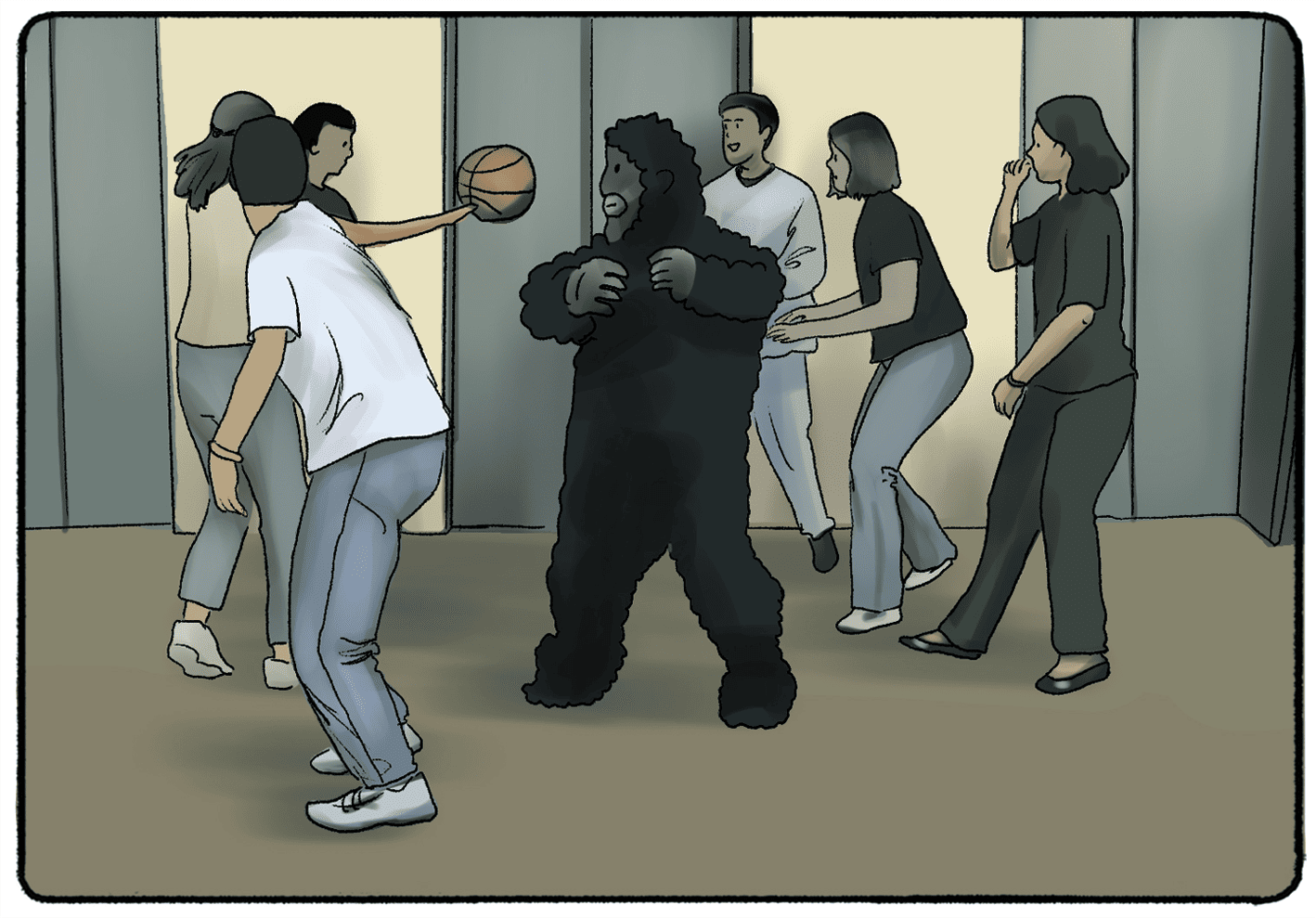
Inattentional blindness, a well-documented phenomenon in human psychology, refers to the failure to notice a fully visible, but unexpected, object or event when attention is directed elsewhere. It’s the classic “invisible gorilla” experiment writ large – a testament to the selective nature of human perception. While originating in the study of cognitive processes, the core concept of missing the obvious when focused on the immediate task holds profound implications for the design and operation of autonomous flight technology. For unmanned aerial vehicles (UAVs) and advanced aerial systems, a digital equivalent of inattentional blindness could spell catastrophic failure, emphasizing the critical need for sophisticated sensor arrays and intelligent processing that ensures comprehensive situational awareness, irrespective of primary mission focus.

The Perceptual Imperative in Autonomous Flight
Autonomous flight systems operate in complex, dynamic environments, demanding an extraordinary level of perception and decision-making. Unlike a human pilot who might subconsciously filter out irrelevant information, a drone’s flight technology must process a continuous torrent of data from its surroundings. This data includes everything from terrain elevation, weather patterns, and electromagnetic interference to the presence of other aerial vehicles, static structures, and unexpected moving obstacles like birds or ground vehicles.
The challenge lies not just in collecting this data, but in interpreting it effectively and in real-time. A drone’s onboard processing capabilities, while powerful, are finite. The allocation of these resources – prioritizing data streams from navigation sensors, gimbal stabilization, or payload operation – can inadvertently create a digital form of “inattentional blindness.” If a system is optimized to identify a specific type of target or follow a predefined flight path with rigid focus, it might fail to register a novel, unpredicted threat that falls outside its immediate processing parameters or attentional “bandwidth.” This underscores the necessity for flight technology that builds a perpetually updated and robust environmental model, constantly scanning for anomalies rather than just confirming expected patterns.
Sensors as the Eyes and Ears: Mitigating Digital Inattentional Blindness
To overcome the inherent limitations of focused processing, modern flight technology employs a diverse suite of sensors designed to capture a holistic view of the operational environment. These sensors are the primary defense against digital inattentional blindness, working in concert to provide redundancy and breadth of perception.
Sensor Fusion for Holistic Awareness
No single sensor technology is perfect for every scenario. Optical cameras excel in good lighting, LiDAR provides precise depth mapping regardless of light but can be affected by certain atmospheric conditions, and radar penetrates fog and rain but offers lower resolution. To combat the potential for any one sensor to “miss” crucial information, advanced flight systems leverage sensor fusion. This involves combining data from multiple disparate sensor types – visual, infrared, ultrasonic, LiDAR, radar, and inertial measurement units (IMUs) – into a single, comprehensive environmental model.
Sensor fusion algorithms constantly cross-reference data points, validating detections, resolving ambiguities, and filling in gaps where one sensor might be limited. For instance, if a camera detects a vague shape in low light, LiDAR might confirm its precise distance and form, while radar tracks its velocity. This redundancy ensures that even if one sensory input is momentarily occluded or fails to register an unexpected element, other sensors can compensate, drastically reducing the chances of a critical object going unnoticed. The combined stream of information creates a richer, more reliable understanding of the environment, making the system far less susceptible to any form of “inattentional blindness” where an unexpected object might be ignored.
Advanced Imaging and Vision Systems
High-resolution visible light cameras, often paired with sophisticated gimbal stabilization for clear imagery, form the cornerstone of a drone’s visual perception. These are augmented by computer vision algorithms trained on vast datasets to perform real-time object detection, classification, and tracking. Modern systems can distinguish between various types of obstacles – other aircraft, birds, power lines, trees, buildings, and even subtle changes in terrain.
Furthermore, thermal cameras provide an invaluable layer of perception, especially in low-light or obscured conditions where visible light cameras struggle. They detect heat signatures, allowing the system to “see” living creatures or active machinery that might otherwise be invisible. The integration of these advanced imaging systems, coupled with machine learning models, allows the drone to actively “pay attention” to a wide array of potential threats and unexpected elements, far beyond the narrow scope of its primary mission payload. These systems are continuously learning to identify novel objects and patterns, reducing the likelihood of a previously unseen but critical object being overlooked.
LiDAR and Radar for Depth and Range
Light Detection and Ranging (LiDAR) technology uses pulsed lasers to measure distances, creating highly accurate 3D point clouds of the surrounding environment. This provides precise spatial awareness, crucial for distinguishing between objects in the foreground and background, and for mapping complex obstacles like tree branches or intricate structures. LiDAR’s independence from ambient light makes it particularly effective in diverse lighting conditions, from bright daylight to complete darkness.
Radar systems, on the other hand, emit radio waves to detect objects and measure their range, velocity, and angle. Radar’s unique advantage lies in its ability to penetrate adverse weather conditions such as fog, rain, and snow, where optical and LiDAR systems may be impaired. By combining the high-resolution depth mapping of LiDAR with the all-weather penetrative capabilities of radar, flight technology equips drones with a robust perception system that minimizes environmental “blind spots,” ensuring that unexpected objects are detected even when visibility is poor.
Intelligent Obstacle Avoidance Algorithms
The raw data collected by a drone’s sensor suite is only as useful as the algorithms that process and act upon it. Intelligent obstacle avoidance algorithms are the “brain” that prevents digital inattentional blindness from translating into collision.
Real-time Path Planning and Dynamic Re-routing
At the heart of autonomous flight is the ability to continuously construct and update a real-time 3D map of the drone’s immediate environment. Using this map, path planning algorithms determine the optimal and safest trajectory. Should an unexpected obstacle appear within the drone’s sensor range, these algorithms must swiftly re-evaluate the situation and dynamically re-route the flight path to avoid a collision. This requires sophisticated computational power to perform complex calculations in milliseconds, ensuring that the drone can react to sudden, unforeseen events. The ability to autonomously adapt its flight plan to previously unencountered objects is a direct countermeasure to the concept of inattentional blindness, as the system is programmed to prioritize safety regardless of its initial focus.
Predictive Modeling and Anomaly Detection
Beyond simply reacting to detected objects, advanced flight technology incorporates predictive modeling and anomaly detection. These algorithms learn from past flight data and environmental patterns to anticipate potential hazards. For instance, if a drone repeatedly flies over a specific area, the system can build a historical model of expected features. Any significant deviation from this model – an unexpected structure, a sudden change in terrain, or an unusually dense cluster of moving objects – is flagged as an anomaly.
Anomaly detection acts as an early warning system, prompting the drone to give “extra attention” to a potentially novel or critical element. This proactive approach helps to overcome inattentional blindness by training the system not just to identify known obstacles, but to actively search for and investigate anything that doesn’t fit the expected pattern, thus guarding against missing the truly unexpected.
Ensuring Comprehensive Situational Awareness in Future Flight
The pursuit of absolute comprehensive situational awareness is an ongoing journey in flight technology. As drones become more integrated into complex airspaces and undertake increasingly autonomous missions, the robustness of their perception and avoidance systems will be paramount. Future advancements will likely involve even more powerful onboard processors, enabling faster and more complex AI/ML models to run at the edge, further enhancing real-time decision-making. The development of advanced meta-sensors that combine multiple sensing modalities into a single unit, alongside sophisticated software that learns and adapts to an ever-wider range of unexpected scenarios, will continue to push the boundaries. The ultimate goal is to engineer flight technology that is inherently “attentive,” capable of perceiving, understanding, and reacting to its entire environment with unparalleled reliability, effectively rendering the concept of digital inattentional blindness an artifact of less sophisticated times.