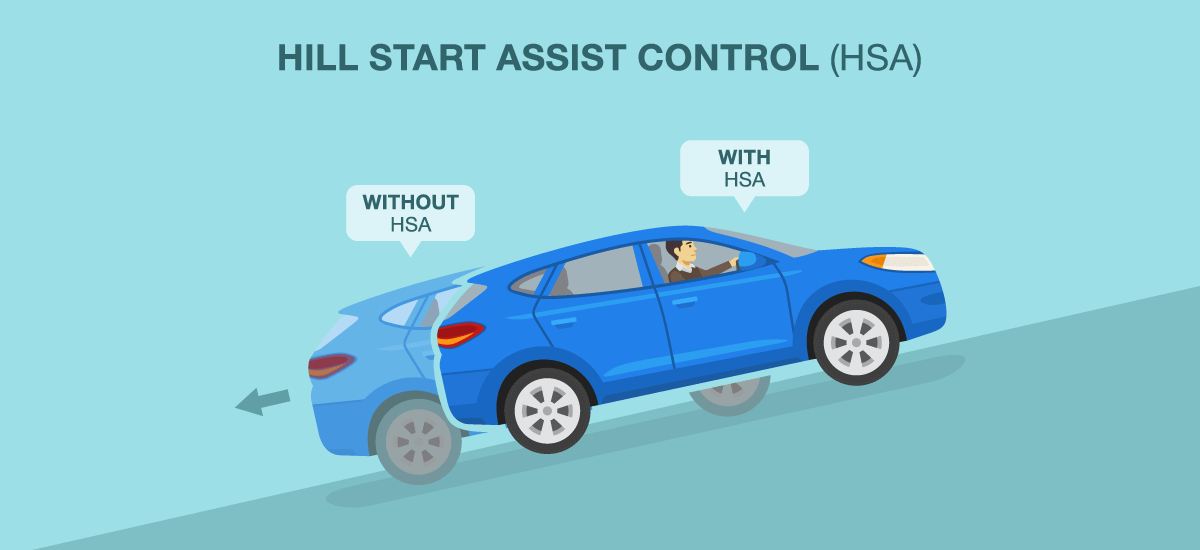
In the dynamic world of unmanned aerial vehicles (UAVs) and advanced flight systems, precision and stability are paramount. Pilots and autonomous systems alike constantly contend with environmental variables, among which varied terrain presents one of the most persistent challenges. While the term “hill assist control” might traditionally evoke images of automotive technology preventing rollback on inclines, its interpretation within the realm of flight technology refers to sophisticated systems designed to enable UAVs to maintain stable, controlled flight over undulating landscapes, inclines, declines, and other topographically diverse environments. It represents a critical advancement in flight stabilization and navigation, ensuring consistent performance regardless of ground elevation changes.
At its core, hill assist control in flight technology is about augmenting a UAV’s ability to perceive, react to, and compensate for changes in ground altitude and the associated aerodynamic effects when traversing hilly or mountainous regions. It’s an intelligent system that transcends basic altitude hold, integrating advanced sensor data and sophisticated algorithms to provide an extra layer of stability and control, thereby enhancing operational safety, mission accuracy, and pilot confidence.
Understanding the Challenge of Terrain for UAVs
Flying a drone or any UAV over flat, open terrain is a relatively straightforward task, relying primarily on barometric pressure sensors for altitude and GPS for horizontal positioning. However, introduce varied topography, and the complexities multiply significantly. “Hills” in this context can be anything from gentle slopes to steep cliffs, dense urban landscapes with varying building heights, or even dynamic natural environments with significant elevation changes. These environments pose several critical challenges for flight technology.
Inaccurate Altitude Readings
Traditional altitude hold relies heavily on barometric pressure sensors, which measure atmospheric pressure to determine height above a reference point, often sea level or takeoff point. While effective for relative altitude, these sensors don’t directly measure altitude above ground level (AGL). Over hills, a UAV flying at a constant barometric altitude could dangerously decrease its AGL, risking collision, or unnecessarily increase it, moving out of optimal operational range. True terrain-following requires a dynamic understanding of the ground below.
Aerodynamic Instabilities
As UAVs ascend or descend slopes, they encounter varied air currents, wind shear, and turbulence patterns that are often exacerbated by topographical features. Wind patterns around hills can be unpredictable, creating updrafts, downdrafts, and crosswinds that destabilize flight and demand constant, precise control inputs. A sudden downdraft over a ridge, for instance, could cause an unexpected drop in altitude, necessitating rapid compensation.
Navigation and Path Planning Complexity
For autonomous missions, navigating complex terrain requires more than just waypoint-based flight. It demands real-time awareness of the terrain to generate safe and efficient flight paths. Without specific terrain-adaptive control, an autonomous drone might attempt a linear path that intersects a hill or is suboptimal for data collection due to inconsistent AGL. Pilots also struggle with maintaining a consistent visual perspective and trajectory when the ground below is constantly changing.
The Core Principles of Hill Assist Control
Hill assist control systems address these challenges by integrating advanced sensing, processing, and control mechanisms. The fundamental principle is to enable the UAV to maintain a user-defined or autonomously determined flight profile relative to the actual ground contour, rather than a fixed altitude above a static reference. This involves a synergistic interplay of various technologies to achieve robust terrain-adaptive flight.
Relative Altitude Maintenance
Unlike barometric altitude, hill assist control focuses on maintaining a precise AGL. This means that as the drone flies over a rising hill, it intelligently gains altitude to stay a consistent distance above the ground. Conversely, over a decline, it will proportionally descend. This dynamic adjustment is crucial for applications like mapping, inspection, and cinematography, where consistent data capture or framing is essential.
Enhanced Stabilization Against Terrain-Induced Turbulence
The system proactively counters destabilizing aerodynamic forces associated with terrain features. By leveraging sensor data on wind, attitude, and position, hill assist algorithms can predict and mitigate the impact of updrafts, downdrafts, and turbulent air pockets. This leads to smoother flight, reduced power consumption due to fewer drastic corrections, and extended flight times.
Predictive Path Adjustment
For autonomous or semi-autonomous flight, hill assist control integrates with mission planning to create intelligent flight paths that account for terrain variations. This can involve generating 3D flight corridors that follow the ground contours, optimizing ascent and descent rates, and ensuring obstacle clearance. This predictive capability is a significant leap beyond reactive collision avoidance, as it anticipates and incorporates terrain challenges into the initial flight strategy.
Key Technologies Enabling Hill Assist Control
The implementation of effective hill assist control relies on a sophisticated suite of hardware and software components working in unison. These technologies span various aspects of flight control, from perception to execution.
Advanced Sensor Fusion
At the heart of hill assist is the ability to gather and interpret diverse environmental data.
Laser and Radar Altimeters (LiDAR & Radar)
These sensors provide highly accurate, direct measurements of distance to the ground immediately below the UAV. LiDAR (Light Detection and Ranging) systems emit laser pulses and measure the time it takes for the pulse to return, creating a precise elevation profile. Radar altimeters work similarly with radio waves. Unlike barometric sensors, these offer true AGL readings, crucial for dynamic terrain following.
Vision-Based Systems
Stereo cameras or structured light sensors can create 3D maps of the immediate environment, allowing the UAV to “see” the terrain’s contours. This is particularly useful for close-range operations and obstacle detection on slopes. Machine vision algorithms process this data to provide real-time topographical information.
High-Precision GPS and GNSS
While GPS primarily provides horizontal positioning, advanced GNSS (Global Navigation Satellite System) receivers offer higher accuracy, which can be crucial for correlating the UAV’s position with high-resolution digital elevation models (DEMs). When combined with RTK (Real-Time Kinematic) or PPK (Post-Processed Kinematic) corrections, positional accuracy can be reduced to centimeter level, further refining terrain awareness.
Digital Elevation Models (DEMs) and Terrain Databases
For comprehensive planning and predictive control, UAVs can pre-load or access real-time digital elevation models of the operational area. These databases provide detailed topographical information, allowing the flight controller to anticipate terrain changes along the planned flight path. The UAV can then autonomously adjust its altitude and trajectory to maintain a constant AGL or a specific terrain-following profile.
Advanced Flight Control Algorithms
The raw data from sensors and databases needs to be processed by intelligent algorithms.
Predictive Control Logic
These algorithms analyze current flight parameters, sensor readings, and anticipated terrain changes (from DEMs) to predict future flight states and compute necessary control inputs. This proactive approach allows for smoother and more energy-efficient adjustments than purely reactive systems.
PID Control with Adaptive Gain
Proportional-Integral-Derivative (PID) controllers are fundamental to most flight control systems. For hill assist, these controllers are often augmented with adaptive gain scheduling, allowing the system to adjust its responsiveness based on the terrain’s steepness, wind conditions, and desired flight profile, ensuring stable control across varying flight conditions.
Applications and Benefits of Hill Assist Systems
The integration of hill assist control significantly expands the capabilities and utility of UAVs across numerous sectors. Its benefits extend beyond mere stability, impacting efficiency, safety, and data quality.
Enhanced Aerial Surveying and Mapping
For topographical mapping, agricultural surveying, and construction site monitoring, maintaining a consistent AGL is paramount for generating accurate and uniform data. Hill assist systems ensure that photogrammetry and LiDAR data are collected with minimal variation in scale and resolution, leading to higher quality 3D models and orthomosaics. This reduces overlap requirements and improves processing efficiency.
Precise Inspection and Monitoring
Inspecting infrastructure like power lines, pipelines, or wind turbines located in hilly or mountainous regions becomes safer and more efficient with hill assist. The system allows the UAV to follow complex contours with precision, ensuring that all parts of the structure are consistently monitored from an optimal distance and angle, even on uneven terrain. This minimizes the risk of missing critical details or flying too close/far from the asset.
Cinematic and Professional Filmmaking
For aerial cinematographers, achieving smooth, consistent shots while navigating challenging landscapes is critical. Hill assist control enables drones to autonomously follow terrain, creating dynamic tracking shots that maintain a perfect frame and distance from subjects or landscape features, even as elevation changes. This capability opens up new creative possibilities for capturing breathtaking footage in complex environments.
Search and Rescue Operations
In emergency scenarios in rugged terrain, UAVs equipped with hill assist can more effectively search for missing persons or assess disaster zones. The ability to maintain a consistent search altitude above ground maximizes sensor effectiveness (e.g., thermal cameras) and ensures thorough coverage of an area, improving the chances of a successful outcome while minimizing flight risks for the drone.
Future Developments in Terrain-Adaptive Flight Control
The evolution of hill assist control is continuous, driven by advancements in AI, sensor technology, and computational power. The future promises even more sophisticated and autonomous capabilities.
AI-Driven Terrain Learning and Prediction
Future systems will leverage machine learning to continuously adapt and improve their understanding of terrain dynamics. UAVs could learn specific wind patterns associated with certain topographical features or predict optimal flight paths based on historical data and real-time environmental inputs, leading to more resilient and efficient terrain-adaptive flight. This could include real-time environmental modeling to predict turbulence zones.
Swarm Intelligence and Collaborative Terrain Mapping
In multi-drone operations, hill assist capabilities could be enhanced through swarm intelligence, where multiple UAVs collaboratively map terrain and share real-time topographical data. This would allow for broader coverage, more robust terrain models, and synchronized, terrain-adaptive flight paths for an entire fleet, optimizing large-scale data collection or search operations.
Integration with Hyperspectral and Multi-Spectral Imaging
As sensing technologies advance, hill assist will be crucial for integrating these complex payloads. Maintaining precise AGL over varied terrain is essential for consistent data quality from hyperspectral sensors, which require specific altitudes and illumination angles for optimal performance in applications like environmental monitoring or precision agriculture.

Seamless Human-Machine Teaming
Future interfaces will allow pilots to intuitively define complex terrain-following missions with minimal input, with the hill assist system handling the intricacies of vertical navigation. This will reduce pilot workload, increase accessibility, and enable more complex missions to be executed with greater safety and precision, bridging the gap between full autonomy and direct human control.
In conclusion, “hill assist control” in flight technology is not just a feature; it is a fundamental pillar of advanced UAV operation. By enabling drones to intelligently perceive and react to the three-dimensional complexities of our world, these systems are unlocking unprecedented levels of precision, safety, and efficiency across a vast spectrum of applications, solidifying their role as indispensable components of modern aerial platforms. As flight technology continues to evolve, the capabilities of terrain-adaptive control will undoubtedly expand, pushing the boundaries of what UAVs can achieve in increasingly challenging environments.