In the dynamic world of drone flight technology, the term “latency” frequently arises as a critical determinant of performance, safety, and the overall user experience. Far from being a mere technical specification, good latency represents the invisible thread connecting pilot to machine, sensor to system, and a drone’s internal components to its real-world environment. Understanding what constitutes “good” latency is paramount for anyone involved with UAVs, from engineers designing flight controllers to pilots executing intricate maneuvers. It dictates how responsive a drone feels, how accurately it navigates, and ultimately, how reliably it performs its intended functions.
Understanding Latency in Drone Flight Technology
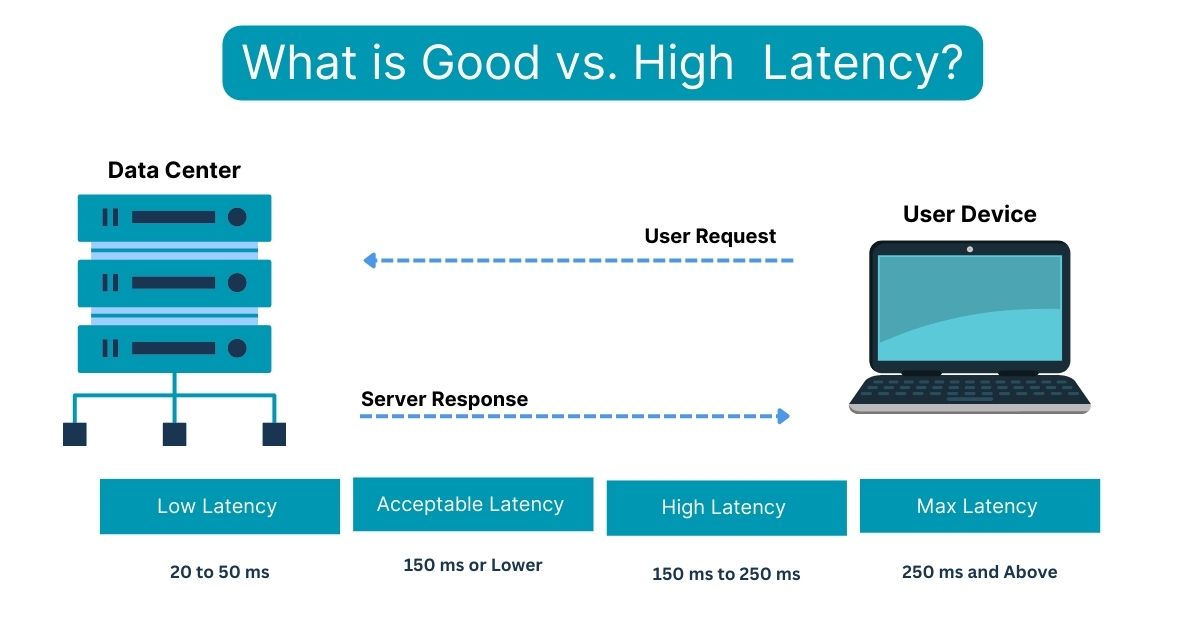
Latency, at its core, refers to the delay between a cause and effect within a system. In the context of drone flight technology, this encompasses any time lag from the moment a signal is sent or data is captured until its corresponding action or interpretation occurs. Whether it’s the interval between a stick input on a controller and the drone’s motor response, or the delay between a sensor detecting an object and the flight controller initiating an avoidance maneuver, latency profoundly influences the drone’s behavior.
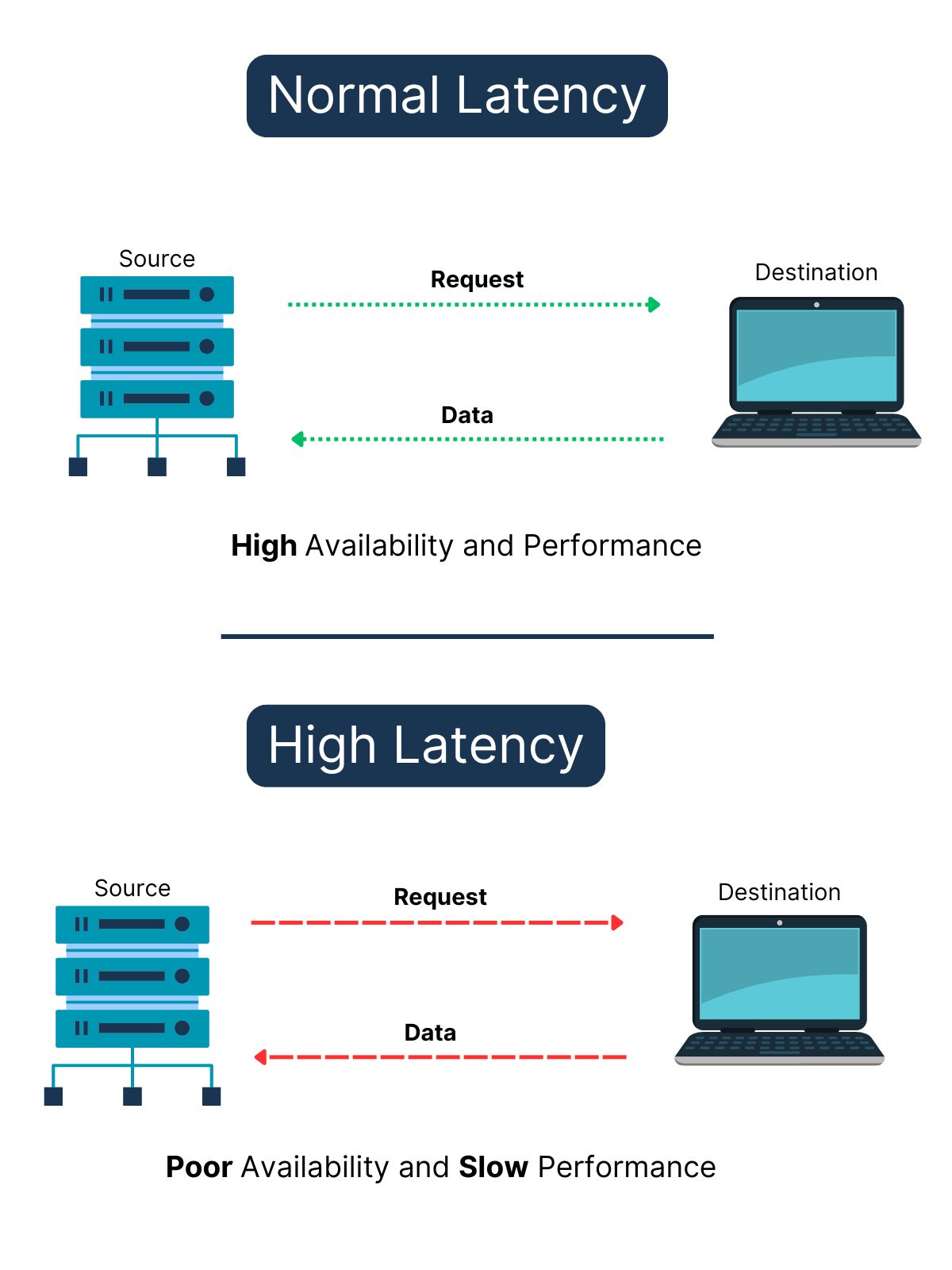
The significance of latency cannot be overstated. High latency can lead to a sluggish, unresponsive drone, making precision flight challenging or even impossible. In critical applications like aerial surveying, package delivery, or search and rescue operations, delayed responses can have severe consequences, impacting data accuracy, operational efficiency, and safety. Conversely, low latency contributes to a fluid, predictable flight experience, enhancing the pilot’s sense of control and enabling the drone’s autonomous systems to react with greater agility and precision.
Within a drone’s complex architecture, several distinct types of latency contribute to the overall system delay. These primarily include control link latency (the delay in pilot commands reaching the drone), video transmission latency (the delay in the FPV camera feed reaching the pilot), and sensor processing latency (the time taken for onboard sensors to gather and process environmental data for navigation and decision-making). Each of these pathways is critical, and optimizing them is a continuous goal in the advancement of flight technology.
The Critical Role of Latency in Control and Navigation Systems
The bedrock of any drone’s operational integrity lies in its control and navigation systems. Latency within these systems directly translates into the drone’s responsiveness, stability, and its ability to maintain precise flight paths, making it a crucial performance metric.
Control Link Latency
Control link latency is the time lag between a pilot’s input on their remote controller and the flight controller on the drone receiving and acting upon that command. This delay is influenced by several factors, including the chosen radio frequency, the encoding and decoding processes, and the efficiency of the wireless communication protocol. For drone racing, acrobatic flight, or any scenario demanding instantaneous reactions, control link latency is perhaps the most critical factor. Even a few tens of milliseconds can mean the difference between smoothly navigating a gate and crashing. Modern radio systems employ advanced protocols like ExpressLRS or TBS Crossfire, which are specifically engineered to minimize this delay, often achieving single-digit millisecond latencies. This ultra-low latency allows pilots to feel a direct, almost wired connection to their aircraft, enabling a level of precision and control that would be unattainable with older, slower systems. Beyond manual piloting, low control link latency is also vital for semi-autonomous modes, where the pilot might provide high-level commands that the drone’s flight controller then executes with precise, timely adjustments.
Navigation and Stabilization Latency
The drone’s ability to navigate accurately and maintain stable flight relies heavily on the rapid processing of data from its internal sensors. Inertial Measurement Units (IMUs) — comprising accelerometers and gyroscopes — GPS receivers, barometers, and magnetometers continuously feed raw data to the flight controller. Navigation and stabilization latency refers to the delay between these sensors capturing environmental or positional data and the flight controller generating corrective outputs to the motors. For instance, if a gust of wind impacts the drone, the IMU detects the change in orientation, and the flight controller must rapidly calculate and apply motor adjustments to counteract the disturbance and restore stability. High latency here would result in overcorrections, oscillations, or an inability to hold a stable position, leading to erratic or inefficient flight. Modern flight controllers utilize powerful microprocessors and highly optimized Kalman filters or complementary filters to process sensor data with extreme speed and accuracy, often operating at refresh rates of hundreds or even thousands of hertz. This ensures that the drone’s internal model of its state (position, velocity, orientation) is as current as possible, enabling robust stabilization and precise waypoint navigation.
Latency’s Influence on Real-time Sensor Data and Perception
Beyond direct control and internal navigation, a drone’s perception of its environment is heavily dependent on the timely processing of real-time sensor data, particularly for applications involving immersive piloting or autonomous decision-making.
FPV Video Latency
First-Person View (FPV) flying relies on a video feed from a camera on the drone transmitted wirelessly to goggles or a monitor worn by the pilot. FPV video latency is the delay between the camera capturing an image and that image being displayed to the pilot. For many FPV pilots, especially those involved in racing or freestyle, video latency is as critical as, if not more critical than, control link latency. Even slight delays can disorient the pilot, leading to misjudgments of distance, speed, and trajectory. Analog FPV systems typically offer very low latency (often below 20ms), largely due to the simplicity of their signal processing. However, they suffer from lower resolution and susceptibility to interference. Digital FPV systems, while offering superior image quality and greater range, historically introduced higher latency due to the need for compression, encoding, and decoding of the digital signal. Advances in digital FPV technology have significantly reduced this gap, with high-end digital systems now achieving latencies comparable to, or even better than, some analog setups, making them increasingly viable for competitive applications. The goal for “good” FPV latency is often cited as below 30ms, with sub-20ms being ideal for high-performance flight, ensuring the pilot’s visual feedback is almost instantaneous with the drone’s real-world movement.
Obstacle Avoidance and Environmental Sensing Latency
For autonomous drones, safety-critical functions like obstacle avoidance and real-time environmental mapping are directly constrained by sensor processing latency. Drones equipped with LiDAR, ultrasonic sensors, stereo cameras, or optical flow sensors continuously scan their surroundings. The data collected by these sensors must be processed rapidly to build an accurate, up-to-date perception of the environment. Obstacle avoidance latency is the time taken from a sensor detecting an impending collision to the drone’s flight controller initiating a corrective maneuver (e.g., stopping, diverting, or climbing). If this latency is too high, the drone might not react quickly enough to avoid an object, particularly at higher speeds. Similarly, for applications like dynamic waypoint generation or following a moving target, the drone’s internal environmental map needs to be refreshed with minimal delay. This requires not only fast sensor hardware but also efficient algorithms for data filtering, object recognition, and path planning. The development of dedicated co-processors and AI accelerators on drones is increasingly focused on reducing this latency, enabling more sophisticated and reliable autonomous behaviors crucial for urban delivery, industrial inspection, and search and rescue missions.
The Pursuit of Ultra-Low Latency: Technologies and Future Trends
The continuous drive to reduce latency across all facets of drone flight technology is a defining characteristic of innovation in the industry. This pursuit involves advancements in hardware, software, and communication protocols, each contributing to a more responsive and intelligent drone.
Hardware optimization plays a foundational role. Faster microcontrollers and System-on-Chip (SoC) solutions with higher clock speeds and more efficient architectures enable flight controllers to process commands and sensor data with unprecedented speed. Dedicated co-processors, such as those found in advanced FPV digital systems or autonomous flight platforms, are designed to offload specific tasks like video encoding or complex sensor fusion, significantly reducing bottlenecks. This specialization allows for parallel processing and avoids the general-purpose CPU from becoming a latency constraint.
On the software front, algorithmic innovations are equally crucial. Highly optimized firmware for flight controllers employs predictive filtering and advanced control loops that can anticipate movements and compensate for delays. Efficient data compression techniques for video transmission and streamlined communication protocols minimize the amount of data that needs to be sent, thereby reducing transmission time. For autonomous systems, machine learning models are being developed to make real-time decisions with minimal inference latency, transforming raw sensor data into actionable commands within milliseconds.
Emerging communication technologies are also pivotal. Beyond proprietary radio links, the exploration of standard protocols like Wi-Fi 6E or even 5G/6G cellular networks for drone communication promises higher bandwidth and lower latency over greater distances, opening up possibilities for cloud-connected autonomous fleets and enhanced remote operation. Specialized mesh networks for drones are also being developed to ensure robust, low-latency communication in challenging environments or for swarm operations.
However, the pursuit of ultra-low latency often involves trade-offs. Achieving minimal delay can sometimes come at the cost of increased power consumption, reduced communication range, or higher manufacturing costs. For example, higher frame rates in FPV systems require more processing power and bandwidth, impacting battery life or maximum operational distance. Engineers must carefully balance these factors, tailoring latency profiles to specific drone applications. For a cinematic drone flying slowly, slightly higher video latency might be acceptable if it means longer flight times and stable high-resolution footage. For a racing drone, every millisecond counts, justifying specialized, high-power components.
Looking ahead, the drive for lower latency will be fundamental to the realization of fully autonomous drone systems, widespread drone delivery networks, and sophisticated swarm intelligence. As drones become more integrated into daily life and undertake increasingly complex tasks, their ability to react instantly and perceive their environment with minimal delay will not just be a performance advantage, but a critical prerequisite for safety, reliability, and ultimately, success.
Quantifying and Experiencing “Good” Latency
Defining “good” latency is not a one-size-fits-all answer; it is highly dependent on the drone’s application and the expectations of its operator. However, certain benchmarks and principles help in quantifying and understanding this crucial performance metric.
For FPV piloting, especially in racing or freestyle, a “good” total system latency (combining camera, VTX, RX, and display) is generally considered to be below 30 milliseconds (ms). Many experienced pilots strive for sub-20ms, which allows for near-instantaneous visual feedback and a profound sense of connection to the aircraft, enabling intuitive and aggressive maneuvers. Analog FPV systems can often achieve 10-20ms, while cutting-edge digital FPV platforms are now matching or even surpassing these figures. Anything above 50-60ms in FPV can begin to feel disconnected, making precise control difficult and contributing to motion sickness for some pilots.
For control link latency, where pilot stick inputs are translated to drone movements, even lower figures are desirable. Modern radio systems can achieve latencies of less than 10ms, often in the single digits. This ultra-low control latency is vital for acrobatic drones or industrial drones requiring pinpoint accuracy, as it minimizes the perceived delay between intent and action. For general purpose or photography drones, a control link latency of up to 50ms might be acceptable, as precise, rapid maneuvers are less critical.
Sensor processing latency, which underpins navigation, stabilization, and obstacle avoidance, is typically measured in the operational refresh rate of the flight controller and its sensors. A flight controller operating at 8kHz (8000 cycles per second) processes sensor data every 0.125ms. This internal system latency is crucial for maintaining rock-solid stability and enabling responsive autonomous functions. While not directly experienced by the pilot as a delay, its impact is felt in the drone’s overall responsiveness, its ability to hold position accurately, and its smooth execution of programmed flight paths. For real-time collision avoidance, the total pipeline from sensor detection to motor response needs to be fast enough to react to objects at the drone’s operational speed, often requiring total latencies in the range of tens of milliseconds.
The subjective experience of “good” latency is often described by pilots as feeling “locked-in” or “connected” to the drone. When latency is low, the drone feels like an extension of the pilot’s will, responding precisely and predictably. Conversely, high latency introduces a feeling of lag, making the drone feel sluggish and unresponsive, leading to overcorrections and frustration. Measuring latency can involve specialized equipment like high-speed cameras to record displays and inputs, or dedicated software tools that log communication timings. However, for many pilots, the true test of good latency is simply in the feel of the flight – an intuitive, seamless interaction between pilot and machine. As drone technology continues to evolve, the relentless pursuit of lower latency will remain a cornerstone, enabling ever more sophisticated, reliable, and engaging flight experiences.