The modern drone is a marvel of miniaturized engineering, packing an array of sophisticated electronics into a compact, airborne platform. From GPS receivers guiding autonomous flight to intricate stabilization systems maintaining aerial composure, each component plays a critical role. Yet, this dense concentration of electrical systems inherently creates a complex environment ripe for internal and external interference. This is where Electromagnetic Compatibility, or EMC, becomes not just a design consideration but a cornerstone of reliable flight technology. EMC ensures that a drone’s electrical and electronic systems can operate without generating excessive electromagnetic interference (EMI) that disrupts other devices, and without being unduly susceptible to EMI from other sources. In the context of flight technology, EMC is the silent guardian of navigation accuracy, stabilization integrity, and overall operational safety.

The Core of Electromagnetic Compatibility in Flight Systems
At its heart, EMC is about harmonious coexistence in the electromagnetic spectrum. Every electrical circuit generates an electromagnetic field, and when multiple such circuits operate in close proximity, their fields can interact. This interaction can be detrimental, leading to what is known as Electromagnetic Interference (EMI). For a drone, EMI can manifest in various forms: erratic sensor readings, dropped GPS signals, glitches in control commands, or even complete system failures.
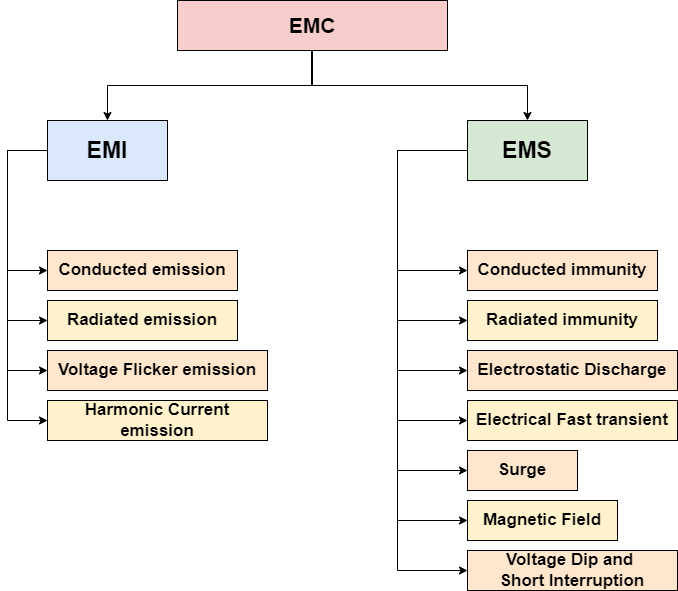
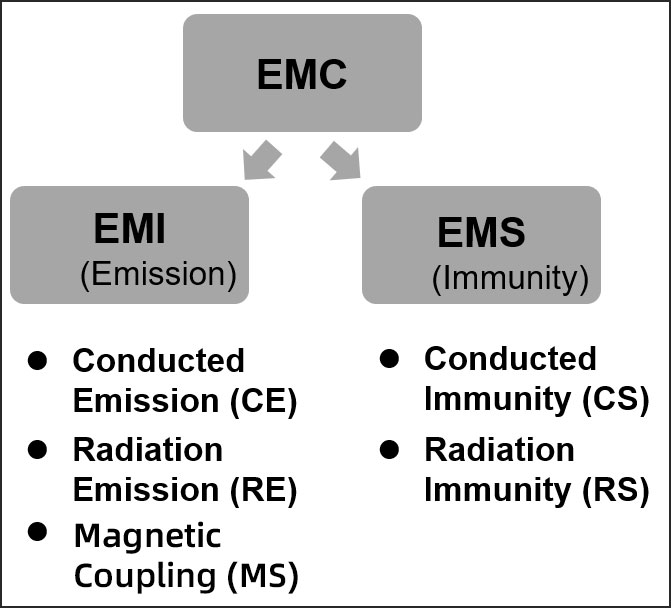
Electromagnetic Compatibility encompasses two primary aspects:
- Emissions: The unintentional generation of electromagnetic energy by a device. For drones, this includes noise from motors, electronic speed controllers (ESCs), communication radios (for control, FPV, or data links), and high-speed digital processors. If these emissions are too high, they can interfere with the drone’s own sensitive components or external systems.
- Immunity (or Susceptibility): The ability of a device to function correctly in the presence of electromagnetic energy. A drone’s flight controller, GPS module, and various sensors must be immune to both internal EMI (from its own noisy components) and external EMI (from cell towers, power lines, Wi-Fi networks, or even another drone nearby).
Why is this so vital for drone flight technology? Imagine a drone attempting an autonomous mission where centimeter-level GPS accuracy is paramount. If the GPS receiver is constantly battling noise generated by the drone’s own ESCs or video transmitter, its ability to lock onto satellite signals and provide precise positioning will be severely compromised. Similarly, the Inertial Measurement Unit (IMU), crucial for stabilization and attitude control, must deliver clean, uninterrupted data. Spurious electromagnetic signals can introduce noise into the IMU’s accelerometer and gyroscope readings, leading to unstable flight or unexpected maneuvers. EMC ensures that these critical flight components receive and process data accurately, uncorrupted by stray electromagnetic energy, thus directly impacting a drone’s ability to navigate, stabilize, and operate safely.
EMC Challenges in Drone Design and Flight Performance
The very nature of drone design presents inherent EMC challenges. Drones are typically compact, requiring a high density of electronic components in a confined space. They also incorporate a diverse range of systems, each with its own electromagnetic signature: powerful electric motors and their associated Electronic Speed Controllers (ESCs) generate significant switching noise; high-frequency radio transceivers operate at various bands for control, video, and data; sensitive GPS and other navigation modules rely on weak signals; and complex digital processors create fast-switching currents.
Sources of Internal EMI in Drones:
- Motors and ESCs: Brushed and brushless motors, driven by ESCs, are notorious sources of electromagnetic noise. The rapid switching of high currents to control motor speed creates broadband electromagnetic interference, especially at higher power levels.
- Communication Radios: Wi-Fi, Bluetooth, RC control links (2.4 GHz, 915 MHz, etc.), FPV video transmitters (5.8 GHz, 1.2 GHz), and data telemetry modules all emit RF energy. While these are intentional emissions, harmonics or out-of-band emissions can interfere with other onboard systems.
- Digital Processors: Microcontrollers and digital signal processors (DSPs) on flight controllers and companion computers generate high-frequency clock signals and fast-switching data lines, which can radiate EMI.
- Power Distribution: The drone’s power bus, carrying significant current, can act as an antenna, radiating noise from connected components.
Impact on Flight Performance:
The consequences of poor EMC in drone flight technology are severe and can range from subtle performance degradation to catastrophic failure:
- Navigation Errors: GPS signal dropout or degradation, leading to position drift, inaccurate waypoints, or even flyaways. Magnetometers (compasses) are highly susceptible to magnetic fields generated by power lines and motors, leading to incorrect heading data.
- Stabilization Issues: Noise introduced into IMU sensors (accelerometers, gyroscopes) can confuse the flight controller, causing instability, wobbling, or unexpected flips. Barometers used for altitude hold can also be affected by electronic noise.
- Control Link Interference: Reduced range or complete loss of control signal, directly impacting the pilot’s ability to command the drone. This is a critical safety concern.
- Video Transmission Problems: Jitter, static, or complete loss of FPV video feed, especially when flying near noisy components or external sources.
- Sensor Malfunctions: Range finders, lidar, and optical flow sensors can experience erroneous readings, leading to poor obstacle avoidance or inaccurate ground tracking.
- Data Integrity: Corruption of telemetry data transmitted from the drone to the ground station.
Key Principles of EMC Design for Robust Flight Systems
Achieving robust EMC in drone flight technology requires a systematic approach throughout the design and manufacturing process. It’s an intricate dance of physics and engineering, employing various techniques to suppress EMI at its source, block its propagation, and ensure component immunity.
1. Shielding: Containing and Protecting
Shielding involves placing a conductive barrier around sensitive components or noise sources.
- Purpose: To prevent electromagnetic fields from entering or exiting a specific area.
- Application: GPS modules are often housed in metal enclosures; delicate sensor boards might be shielded by copper foil or specialized coatings. Critical signal lines can be run in shielded cables. The drone’s frame itself can sometimes contribute to shielding if designed appropriately.
2. Grounding: Managing Current Paths
Proper grounding is perhaps the single most critical EMC principle. It provides a low-impedance path for unwanted currents to safely return to their source, preventing them from creating voltage fluctuations that manifest as noise.
- Purpose: To create a common reference potential for all electronic circuits and to manage common-mode noise.
- Application: A well-designed ground plane on a Printed Circuit Board (PCB) for flight controllers and ESCs. Star grounding schemes or single-point grounding can be used to prevent ground loops. Ensuring low-resistance connections for all ground paths.
3. Filtering: Suppressing Noise at Source
Filters are electronic circuits designed to pass desired frequencies while blocking unwanted ones.
- Purpose: To attenuate high-frequency noise generated by components like motors and ESCs, or to block external noise from entering sensitive circuits.
- Application:
- LC Filters: Commonly used on power lines to ESCs and video transmitters to smooth out noisy DC power and prevent motor noise from propagating to other systems.
- Ferrite Beads/Chokes: Placed on signal and power lines to suppress high-frequency noise by converting it into heat.
- Capacitors: Used across power pins of integrated circuits to decouple power rails and provide local energy storage, preventing voltage dips that can radiate noise.
4. Component Placement & Layout: Strategic Arrangement
The physical arrangement of components on a PCB and within the drone’s frame significantly impacts EMC.
- Purpose: To minimize electromagnetic coupling between noisy and sensitive components.
- Application:
- PCB Layout: Keep high-current paths short and wide. Separate noisy digital sections from sensitive analog sections. Route high-speed traces away from antennas and sensitive inputs. Use solid ground planes.
- Drone Assembly: Position GPS modules and RC receivers as far as possible from motors, ESCs, and video transmitters. Isolate power lines from signal lines. Avoid creating antenna loops with long, unshielded cables.
5. Frequency Management: Avoiding Overlap
With multiple radio systems operating on a drone, careful frequency planning is essential.
- Purpose: To prevent intentional transmissions from interfering with each other or with other drone systems.
- Application: Selecting FPV video channels that are sufficiently separated from RC control frequencies. Ensuring that harmonic emissions from one system do not fall into the operating band of another critical component.
Testing and Compliance for Flight Technology
For drone manufacturers, adhering to EMC standards is not merely a technical best practice; it is a regulatory requirement that dictates market access and ensures user safety. Bodies like the Federal Communications Commission (FCC) in the United States and Conformité Européenne (CE) in Europe set stringent limits on electromagnetic emissions and dictate immunity requirements.
EMC Testing Procedures:
- Radiated Emissions (RE): Measures the electromagnetic fields radiating from the drone into free space. This is often performed in an anechoic chamber to isolate the drone from external interference.
- Conducted Emissions (CE): Measures the EMI that travels along power cables or other conductive paths.
- Radiated Immunity (RI): Exposes the drone to controlled electromagnetic fields to ensure it can operate correctly without being disrupted.
- Conducted Immunity (CI): Injects interference directly into power and signal lines to test the drone’s resilience.
Thorough EMC testing during development, and continuous monitoring throughout production, is critical. It ensures that the drone’s flight controller, navigation systems, communication links, and sensors will perform reliably in real-world environments, free from self-interference or disruption by external sources. By meticulously addressing EMC, engineers guarantee the stability, predictability, and safety that users demand from advanced flight technology. Without it, the intricate dance of electronics within a drone would quickly devolve into an uncontrolled cacophony, rendering the marvel of flight technology unstable and unreliable.