Electricity power factor is a critical metric in understanding the efficiency of electrical power utilization, particularly within systems that rely on alternating current (AC). While often discussed in industrial settings and large-scale power grids, its principles are fundamentally relevant to any complex electrical system, including those powering advanced drone technology. At its core, power factor quantifies how effectively electrical power is being converted into useful work. For drone operators and enthusiasts, grasping this concept can illuminate the underlying electrical demands of their equipment, from the flight controller to the propulsion systems.
Understanding the Components of AC Power
In an AC circuit, the flow of electricity is not a simple, direct progression. Instead, it involves several interconnected concepts: apparent power, real power, and reactive power. Understanding these components is the first step to comprehending power factor.
Apparent Power (S)
Apparent power, measured in Volt-Amperes (VA), represents the total power that appears to be delivered by the voltage and current in an AC circuit. It’s the product of the RMS (Root Mean Square) voltage and the RMS current. Visually, if you imagine water flowing through a pipe, apparent power is like the total volume of water being pushed through the pipe, regardless of whether it’s doing any work. It’s the “headline” number that indicates the potential power capacity required. For instance, a drone battery charging system or a high-power motor might be rated in VA, giving an initial indication of its electrical load.
Real Power (P)
Real power, also known as active power or true power, is the power that actually performs useful work, such as spinning a motor, lighting an LED, or processing data. It’s measured in Watts (W). In our water analogy, real power is the amount of water that actually turns a waterwheel to generate energy. This is the power we are most interested in as it directly translates to the desired output from our electrical devices. For a drone, real power is what propels it through the air, powers its sensors, and drives its camera gimbal.
Reactive Power (Q)
Reactive power, measured in Volt-Amperes Reactive (VAR), is the power that oscillates back and forth between the source and inductive or capacitive components in the circuit. It does not perform any useful work but is necessary to establish and maintain the magnetic fields in inductive components (like motors and transformers) or the electric fields in capacitive components. In the water analogy, reactive power is like the sloshing of water in the pipe, which doesn’t contribute to turning the waterwheel but still requires energy to occur. Motors, which are prevalent in drone propulsion systems, are inherently inductive and therefore consume reactive power.
The Power Triangle and Power Factor Calculation
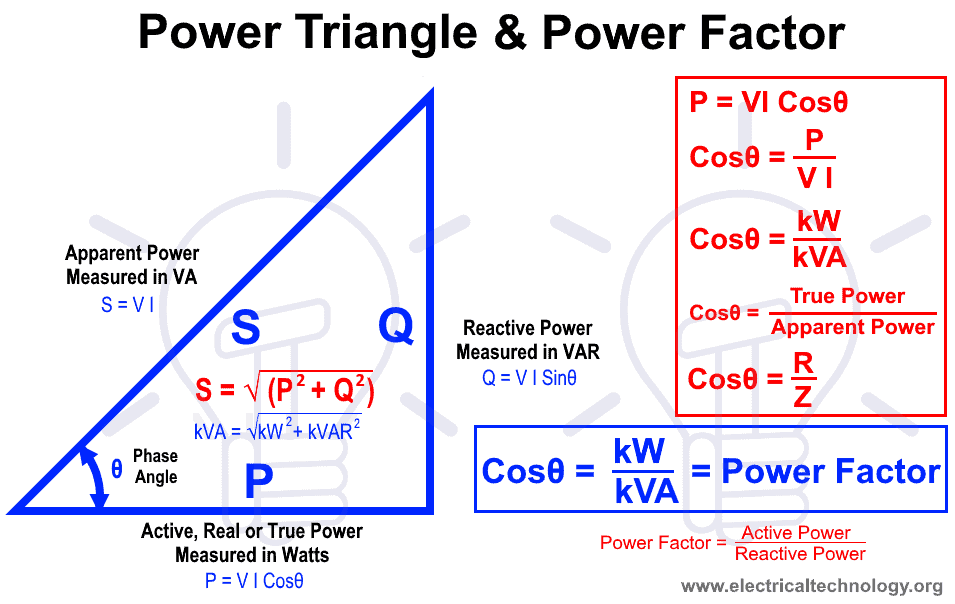
The relationship between apparent power, real power, and reactive power is best visualized using the “power triangle.” In this right-angled triangle, apparent power (S) is the hypotenuse, real power (P) is the adjacent side, and reactive power (Q) is the opposite side. The angle between the apparent power and real power lines is known as the power factor angle (θ).
The power factor (PF) is then mathematically defined as the cosine of this power factor angle (θ):
$PF = cos(theta)$
Alternatively, it can be expressed as the ratio of real power to apparent power:
$PF = frac{P}{S}$
The power factor is a dimensionless quantity, ranging from 0 to 1. A power factor of 1 (or 100%) indicates that all the apparent power is being converted into real power, meaning the circuit is operating at maximum efficiency. A power factor less than 1 signifies that some of the power is reactive, leading to inefficiencies.
The Significance of Power Factor in Drone Systems
While a typical consumer drone might not have a power factor specification explicitly listed on its consumer-facing materials, the underlying electrical principles are always at play. Understanding power factor becomes increasingly important as we consider more complex drone operations, high-performance systems, and the integration of advanced payloads.
Motor Efficiency and Heat Generation
Drone propulsion systems rely on electric motors. Motors are inductive loads, meaning they inherently draw reactive power to create the rotating magnetic fields necessary for operation. A low power factor in these motors indicates that a significant portion of the supplied power is reactive, not contributing to actual torque generation. This excess current, even though it’s not doing useful work, still flows through the motor windings and associated wiring. This flow of current generates heat due to electrical resistance (Joule heating). Excessive heat can degrade motor components, reduce their lifespan, and in extreme cases, lead to motor failure. Improving the power factor of the motors, or compensating for it, can lead to more efficient operation and reduced heat.
Battery Performance and Flight Time
The power source for any drone is its battery. The battery needs to supply the total current required to meet the demands of all onboard systems, including the motors, flight controller, GPS, camera, and any other sensors. When the power factor is low, the current drawn from the battery is higher than what would be required if the power factor were ideal (PF=1) for the same amount of real work being done.
This increased current draw from the battery has several implications:
- Higher Discharge Rates: A higher current draw means the battery is being discharged at a faster rate. This can lead to reduced overall flight time.
- Battery Degradation: High discharge rates can stress lithium-polymer (LiPo) batteries, which are common in drones, potentially leading to accelerated degradation and a shorter battery lifespan.
- Voltage Sag: When a battery is subjected to a high current draw, its internal resistance can cause a noticeable “sag” in voltage. If this voltage sag is too significant, it can affect the performance of sensitive electronic components, including the flight controller and sensors, potentially leading to instability or malfunction during flight.
Power Distribution and Component Stress
In larger, more complex drones or unmanned aerial vehicles (UAVs), power is distributed from the battery to various subsystems through a power distribution board and wiring harness. If the power factor across the entire system is poor, the total current flowing through these distribution pathways will be higher. This increased current can lead to:
- Overheating of Wires and Connectors: Similar to motor windings, wiring and connectors can overheat if subjected to excessive current, posing a fire risk and potential for system failure.
- Voltage Drop: Longer or thinner wires in the power distribution system will experience greater voltage drops when carrying higher currents, further impacting the voltage supplied to components.
- Need for Larger, Heavier Components: To handle the higher currents associated with a low power factor, power distribution components, wiring, and even the battery management system (BMS) might need to be oversized, adding unnecessary weight and bulk to the drone. This is a significant concern in aerospace applications where every gram counts.
Advanced Systems and Payload Integration
As drones are increasingly utilized for professional applications such as aerial surveying, industrial inspection, and scientific research, they carry sophisticated payloads. These payloads can include high-resolution cameras, LiDAR scanners, thermal imaging sensors, and other electronic equipment. The power requirements of these advanced systems can be substantial.
For instance, a powerful gimbal camera with optical zoom or a high-frequency LiDAR unit might draw significant current. If the power factor of these payloads, or the drone’s power system feeding them, is poor, it can disproportionately affect the overall efficiency and performance of the drone. This is where understanding power factor becomes crucial for system designers and engineers who need to ensure that the power delivery system can efficiently support the integrated payloads without compromising flight performance or reliability.
Improving Power Factor in Drone Systems
While achieving a perfect power factor of 1.0 is often challenging in practice due to the inherent inductive nature of motors, several strategies can be employed to improve it or mitigate its negative effects:
Motor Design and Control
The design of the electric motors themselves plays a significant role. Manufacturers are increasingly focusing on motor designs that exhibit better power factors. Additionally, advanced motor controllers (Electronic Speed Controllers or ESCs) can employ sophisticated algorithms, such as field-oriented control (FOC), which can improve the power factor by precisely controlling the current and voltage waveforms supplied to the motor. By synchronizing the current with the voltage more effectively, FOC can reduce reactive power and increase real power utilization.
Power Factor Correction (PFC)
In larger electrical systems, Power Factor Correction (PFC) techniques are commonly used. These typically involve adding capacitors to the circuit. Capacitors are capacitive loads, meaning they generate reactive power that can counteract the reactive power consumed by inductive loads (like motors). By strategically placing capacitors in the circuit, the net reactive power can be minimized, thereby increasing the overall power factor.
While adding passive capacitors directly to a small drone might introduce weight and complexity, active PFC circuits can be implemented in more advanced power management systems for larger UAVs or ground support equipment. These active circuits can dynamically adjust the capacitive or inductive compensation based on the real-time load conditions.
Selecting Efficient Components
When choosing motors, ESCs, and other power-consuming components for a drone, selecting those known for their efficiency and good power factor characteristics is crucial. Manufacturers who provide detailed specifications, including information related to power factor or motor efficiency curves, can be invaluable in making informed decisions for system design.
Understanding Load Balancing
While not directly a power factor correction technique, understanding how loads are distributed across the power system can indirectly influence efficiency. Ensuring that power distribution is balanced and that individual components are operating within their optimal efficiency range can contribute to overall system performance.
Conclusion: Power Factor as an Efficiency Indicator
In essence, power factor is a crucial indicator of how efficiently electrical energy is being used in an AC system. For drone technology, where every watt of power and every gram of weight matters, understanding and optimizing power factor can lead to tangible benefits. From extending flight times and improving battery longevity to ensuring the reliable operation of sophisticated payloads and preventing component stress, the principles of power factor are deeply intertwined with the performance and efficiency of modern aerial vehicles. As drone technology continues to advance, a deeper appreciation for the fundamental concepts of electrical engineering, such as power factor, will become increasingly vital for both designers and operators pushing the boundaries of what’s possible in the skies.