Delta velocity is a critical concept within the realm of Flight Technology, particularly as it pertains to the precise control and understanding of aerial vehicles, including drones and other unmanned aerial systems (UAS). At its core, delta velocity represents the change in velocity over a specific period. This seemingly simple definition unlocks a profound understanding of how an aircraft moves, maneuvers, and interacts with its environment. In the context of flight technology, understanding and controlling delta velocity is paramount for achieving accurate navigation, stable flight, and effective mission execution.
Understanding Velocity and Its Components
Before delving into delta velocity, it’s essential to grasp the fundamental concept of velocity itself. Velocity is a vector quantity, meaning it possesses both magnitude (speed) and direction. In the context of flight, an aircraft’s velocity is a complex interplay of its forward motion, lateral movement, ascent, descent, and any rotational tendencies.

Speed vs. Velocity
While often used interchangeably in casual conversation, speed and velocity are distinct. Speed is a scalar quantity, representing only the magnitude of motion – how fast an object is moving. Velocity, however, includes the direction. An aircraft traveling at 50 mph due east has a different velocity than an aircraft traveling at 50 mph due west, even though their speeds are identical.
Components of Velocity in Flight
For a UAS, velocity can be broken down into several key components, often described within a three-dimensional coordinate system:
- Forward/Backward Velocity (X-axis): This refers to the motion along the aircraft’s longitudinal axis, essentially moving forward or backward relative to its own orientation.
- Left/Right Velocity (Y-axis): This denotes the sideways movement along the aircraft’s lateral axis.
- Up/Down Velocity (Z-axis): This represents the vertical movement, encompassing ascent and descent.
In addition to these translational velocities, rotational velocities (pitch, roll, and yaw) are also crucial for understanding an aircraft’s overall motion state.
Defining Delta Velocity
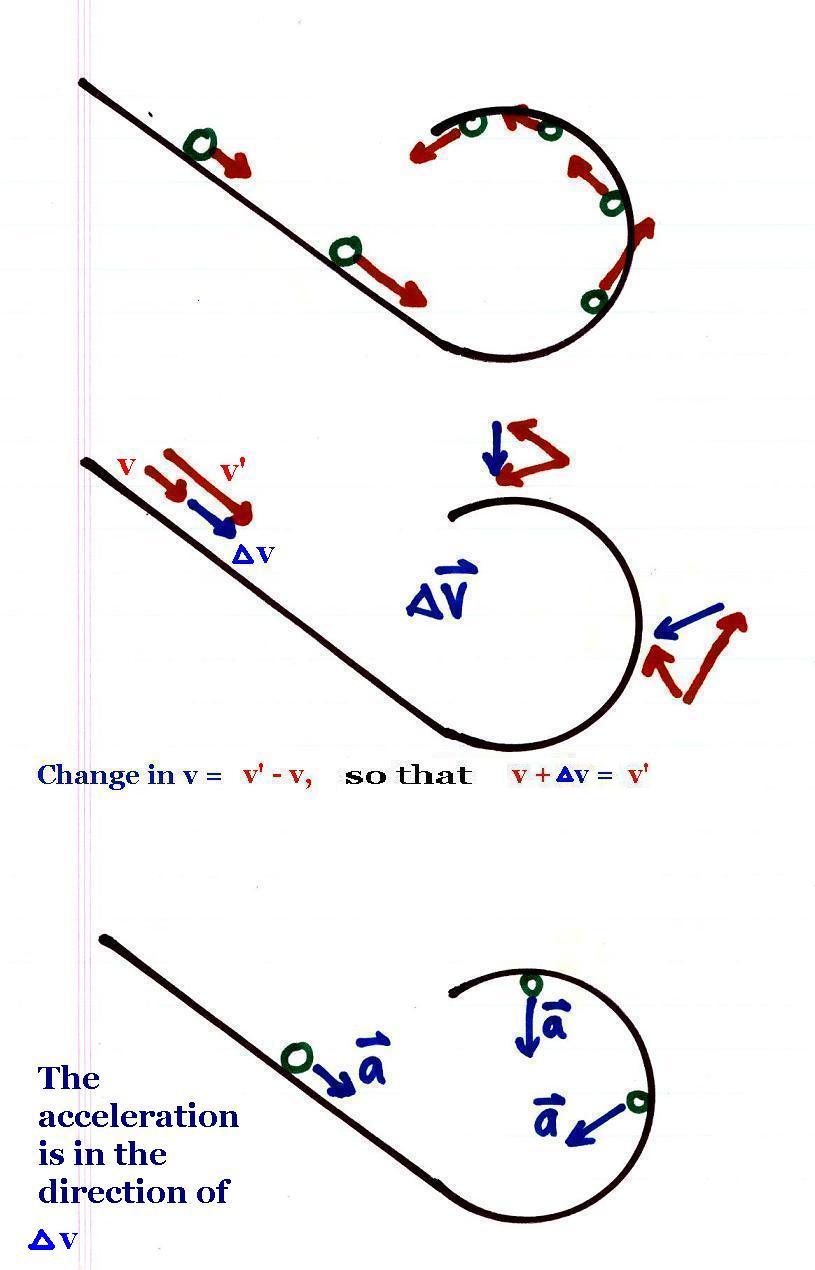
Delta velocity, often denoted by the Greek letter delta ($Delta$) preceding the velocity vector, quantifies the rate of change of an object’s velocity. Mathematically, it’s the difference between a final velocity and an initial velocity over a given time interval.
$Delta vec{v} = vec{v}{final} – vec{v}{initial}$
Where:
- $Delta vec{v}$ is the change in velocity.
- $vec{v}_{final}$ is the final velocity.
- $vec{v}_{initial}$ is the initial velocity.
In the context of flight, this translates to how quickly an aircraft’s speed or direction is changing. This change in velocity is directly related to acceleration. In fact, acceleration is precisely the rate of change of velocity over time:
$vec{a} = frac{Delta vec{v}}{Delta t}$
Where:
- $vec{a}$ is acceleration.
- $Delta t$ is the time interval over which the velocity change occurs.
Therefore, understanding delta velocity is intrinsically linked to understanding the accelerations experienced by the aircraft.
Types of Delta Velocity in Flight
Delta velocity can manifest in various ways in an aerial vehicle:
- Change in Speed (Magnitude): The aircraft speeds up or slows down. This is a change in the scalar component of velocity.
- Change in Direction: The aircraft alters its heading or attitude without necessarily changing its speed. This is a change in the vector component of velocity.
- Combined Change: A simultaneous alteration in both speed and direction.
Significance of Delta Velocity in Flight Control
The ability to precisely control delta velocity is fundamental to the operation of any autonomous or remotely piloted aircraft. Flight control systems are designed to generate and manage the forces and torques necessary to achieve desired changes in velocity.
Navigation and Trajectory Following
For accurate navigation, an aircraft must be able to follow a predetermined path or trajectory. This involves continuously adjusting its velocity to match the planned route. If the flight controller aims to move the aircraft from point A to point B, it must precisely control the delta velocity to accelerate, decelerate, and steer as required. Deviations from the intended trajectory are often a result of errors in controlling delta velocity.
Stabilization and Attitude Control
Maintaining a stable flight attitude is crucial for preventing unwanted movements and ensuring smooth operation. Stabilization systems constantly monitor the aircraft’s orientation and velocity components. When external forces (like wind gusts) or internal disturbances cause a deviation, the stabilization system acts to counteract this by generating control inputs that induce a specific delta velocity to restore the desired attitude. For example, if the aircraft starts to roll unexpectedly, the flight controller will command a change in roll velocity to arrest the roll and return it to level flight.
Maneuverability and Agility
The responsiveness of an aircraft, particularly in terms of how quickly it can change its velocity, defines its maneuverability and agility. Racing drones, for instance, require extremely high delta velocity capabilities to execute rapid turns and dodges. This is achieved through powerful motors, responsive control surfaces or differential thrust, and sophisticated flight control algorithms that can generate rapid and precise changes in velocity.
Measuring and Estimating Delta Velocity
In modern flight technology, delta velocity is not just a theoretical concept; it’s a parameter that is constantly measured, estimated, and controlled.
Inertial Measurement Units (IMUs)
The cornerstone of velocity and acceleration measurement in aerial vehicles is the Inertial Measurement Unit (IMU). An IMU typically comprises:
- Accelerometers: These sensors directly measure linear acceleration along their sensitive axes. By integrating acceleration over time, velocity can be estimated.
- Gyroscopes: These sensors measure angular velocity (rate of rotation). By integrating angular velocity over time, changes in orientation can be determined.
Data from the IMU’s accelerometers provides direct insight into the changes in linear velocity, which is fundamental to delta velocity.
GPS and GNSS Receivers
While IMUs provide short-term, high-frequency data, Global Navigation Satellite System (GNSS) receivers (like GPS) provide absolute position and velocity information over longer periods. By comparing successive GNSS velocity readings, the delta velocity can be calculated, offering a lower-frequency but globally referenced measure of velocity change.
Sensor Fusion
The most robust and accurate estimation of an aircraft’s velocity state, including its delta velocity, is achieved through sensor fusion. This process combines data from multiple sensors (IMU, GNSS, barometers, magnetometers, etc.) using sophisticated algorithms (such as Kalman filters). Sensor fusion leverages the strengths of each sensor while mitigating their weaknesses. For example, an IMU’s high-frequency acceleration data can be used to precisely estimate rapid changes in velocity (delta velocity) between GNSS updates, while GNSS data can be used to correct any drift in the IMU’s velocity estimates over time.
Onboard Flight Controllers
The flight controller is the brain of the aircraft. It receives processed sensor data, compares the current velocity state (including delta velocity) to the desired state, and computes the necessary control commands to achieve the target delta velocity. These commands are then sent to the motors or actuators to effect the desired change in motion.
Applications of Delta Velocity in Flight Technology
The precise management of delta velocity is critical across a wide spectrum of flight technology applications.
Autopilot and Autonomous Systems
Autonomous flight systems rely heavily on accurate delta velocity control. Whether navigating complex environments, performing precise landing maneuvers, or executing formation flying, the autopilot must meticulously manage the aircraft’s acceleration and deceleration to maintain its intended path and orientation. For instance, in an autonomous landing scenario, the autopilot will command a gradual reduction in descent velocity (a negative delta velocity in the vertical axis) to ensure a soft touchdown.
Obstacle Avoidance Systems
Effective obstacle avoidance requires the ability to rapidly change velocity in response to perceived threats. When an obstacle is detected, the system must calculate a new trajectory and then generate the necessary delta velocity to maneuver the aircraft away from danger. This might involve a sharp lateral acceleration to sidestep the obstacle or a sudden ascent to clear it. The speed and precision of this delta velocity adjustment are paramount to the system’s success.
Precision Agriculture and Surveying
In applications like precision agriculture, where drones are used for spraying or crop monitoring, and in aerial surveying and mapping, precise positioning and controlled movement are essential. The ability to maintain a constant altitude and a steady ground speed, or to execute controlled turns over specific areas, all depend on the precise management of delta velocity. For example, maintaining a consistent altitude above uneven terrain requires continuous adjustments to vertical velocity based on altimeter readings.
Advanced Flight Dynamics and Maneuvers
For more dynamic flight regimes, understanding and controlling delta velocity becomes even more critical. This includes:
- High-G Maneuvers: In military or performance-oriented UAS, the ability to execute maneuvers that involve significant positive or negative G-forces (which are a direct consequence of rapid delta velocity changes) is a key performance metric.
- Aerobatics: While less common for typical drones, advanced aerial vehicles can perform aerobatic maneuvers that require precise control over all components of delta velocity, including rapid changes in roll, pitch, and yaw rates.
Challenges in Delta Velocity Control
Despite advancements, controlling delta velocity presents ongoing challenges in flight technology.
Environmental Factors
External forces such as wind, turbulence, and atmospheric pressure changes can significantly impact an aircraft’s actual velocity, deviating it from the intended path. Flight control systems must constantly compensate for these disturbances by adjusting control inputs to generate the necessary delta velocity to counteract external forces and maintain stability.
Sensor Limitations and Noise
Even with sensor fusion, sensor data is never perfect. Noise and inherent limitations in sensor accuracy can lead to errors in velocity estimation, which in turn can affect the accuracy of delta velocity calculations and subsequent control actions. Filtering and advanced estimation techniques are continuously being developed to mitigate these issues.
Computational Latency
The time it takes for the flight controller to process sensor data, perform calculations, and send commands to the actuators introduces latency. In systems requiring rapid delta velocity changes, minimizing this latency is crucial for achieving the desired responsiveness and preventing oscillations or instability.
Power and Actuator Limitations
The ability to achieve a certain delta velocity is ultimately limited by the power output of the motors and the responsiveness of the control surfaces or actuators. High-performance maneuvers require actuators that can generate forces quickly and with sufficient magnitude to overcome inertia and external disturbances.
In conclusion, delta velocity is a foundational concept in flight technology, representing the dynamic change in an aerial vehicle’s motion. Its precise control is indispensable for safe navigation, stable flight, agile maneuvering, and the successful execution of a myriad of applications. As flight technology continues to evolve, the ability to accurately measure, estimate, and command delta velocity will remain a key differentiator in performance and capability.