The burgeoning field of autonomous systems, from sophisticated robotics to advanced aerial vehicles, hinges on the ability of machines to interpret complex, sequential data and make informed decisions. At the heart of many such systems lies a powerful machine learning technique known as the Conditional Random Field (CRF). While the term might sound abstract, CRFs are fundamental to how drones, particularly those equipped for advanced imaging and navigation, can understand their environment, track objects, and execute intricate flight paths. This article delves into the nature of CRFs, exploring their underlying principles and their pivotal role in pushing the boundaries of drone technology.

Understanding the Core Concepts of Conditional Random Fields
At its essence, a Conditional Random Field is a type of discriminative probabilistic graphical model. To unpack this, let’s break down the key components. “Probabilistic” means it deals with probabilities, estimating the likelihood of certain outcomes. “Graphical model” signifies that it uses a graph structure to represent the relationships between variables. “Discriminative” is a crucial distinction; unlike generative models that learn the joint probability of observed and hidden variables, discriminative models directly learn the conditional probability of the hidden (or target) variables given the observed variables.
Sequential Data and Probabilistic Models
Drones constantly collect sequential data. This could be a stream of sensor readings like GPS coordinates, accelerometer data, gyroscope readings, or even a sequence of video frames. The goal is often to make a prediction or label for each element in this sequence. For instance, in object tracking, the observed data might be a sequence of image frames, and the hidden variable for each frame would be the bounding box coordinates of a specific object.
Traditional approaches might try to model the probability of each observation independently. However, in sequential data, the observations are rarely independent. The position of an object in the current video frame is highly dependent on its position in the previous frame. Similarly, a drone’s next movement is influenced by its current trajectory and its intended destination. This is where probabilistic models, especially those designed for sequences, become indispensable.
The Discriminative Power of CRFs
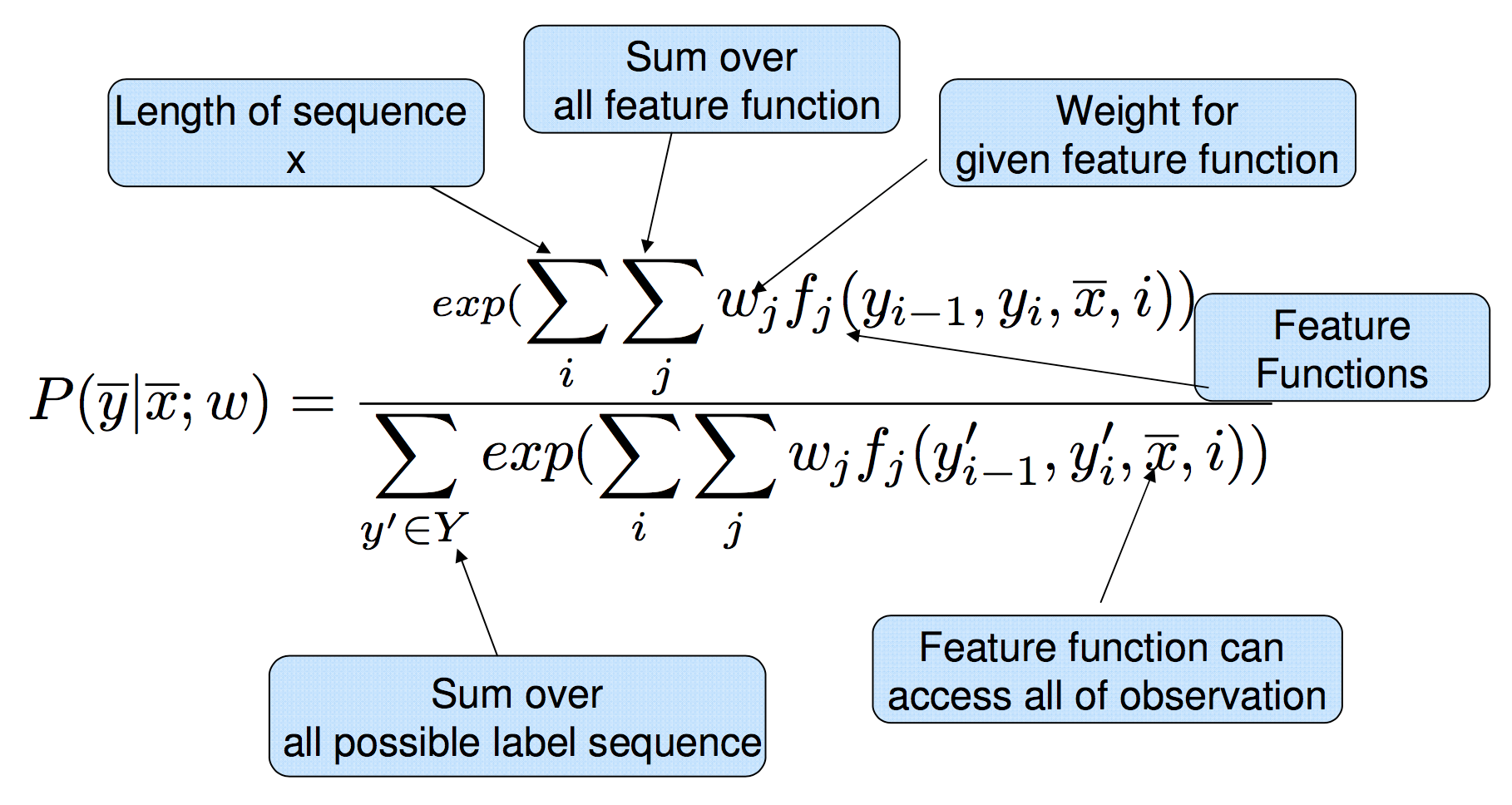
CRFs excel because they focus on the conditional probability $P(text{labels} | text{observations})$. In simpler terms, they learn the probability of a set of labels (e.g., the sequence of object positions) given a sequence of observations (e.g., the sequence of image frames). This discriminative approach is particularly effective when the relationship between observations and labels is complex and the underlying generative process of the observations is difficult to model.
Consider the task of semantic segmentation in drone imagery. The observed data is the image itself. The labels are the categories assigned to each pixel (e.g., “sky,” “ground,” “building,” “tree”). A CRF can learn to predict the label for each pixel not just based on its own color and texture, but also by considering the labels of its neighboring pixels and the overall structure of the image. This is crucial because objects and regions in images have spatial coherence; a pixel labeled “sky” is highly likely to have neighboring pixels also labeled “sky.”
The Structure and Mechanics of Conditional Random Fields
To understand how CRFs achieve their predictive power, we need to look at their internal structure and the underlying mathematical formulations. CRFs employ potential functions that define the “compatibility” or “likelihood” of different label assignments given the observations and the relationships between labels.
Undirected Graphical Models and Potential Functions
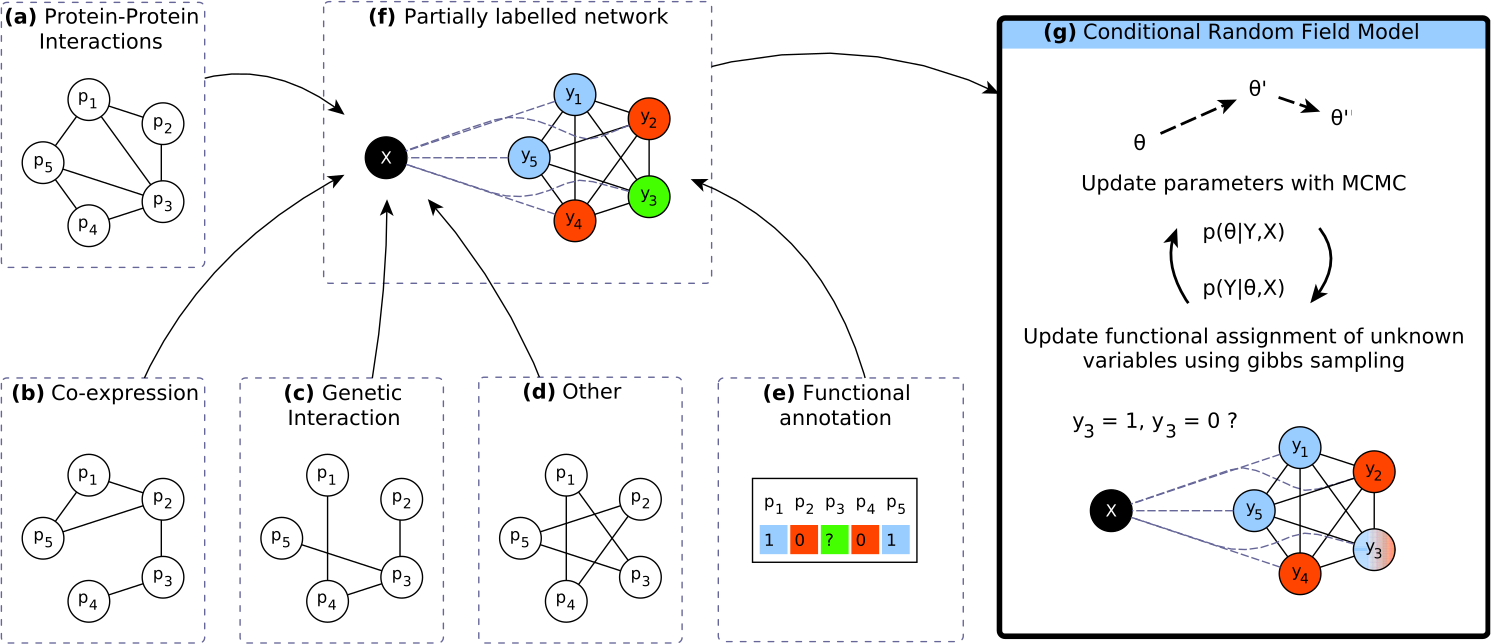
CRFs are typically formulated as undirected graphical models, also known as Markov Random Fields. In these models, nodes represent random variables, and edges represent direct probabilistic dependencies between them. For a sequence, this often translates to a linear-chain structure where each label variable is dependent on its immediate neighbors in the sequence, as well as on the observed data.
The probability distribution over the labels is defined using a set of potential functions. These functions assign a non-negative real number to a configuration of variables. In CRFs, these potential functions are exponentiated and normalized to form a probability distribution. A key feature is that the model learns weights for these potential functions. These weights represent the importance of different features or relationships in the data.
Feature Functions and Learning Weights
The strength of CRFs lies in their ability to incorporate rich, complex feature functions. These features can capture various aspects of the observed data and the relationships between labels. For example, in object tracking:
- Observation Features: These might include the color histogram of a detected object patch, its size, its aspect ratio, or texture descriptors.
- Transition Features: These capture the relationship between consecutive labels. For instance, a feature could indicate how likely it is for an object to move from a certain region in frame $t-1$ to a certain region in frame $t$.
- Label Features: These might relate to the characteristics of a specific label itself, independent of the observations.
During the training phase, the CRF learns the optimal weights for these feature functions. This learning process typically involves maximizing the likelihood of the observed training data. Algorithms like gradient descent are commonly used to adjust the weights to best fit the data. The goal is to find weights that make the CRF assign high probability to the correct sequences of labels given the observed data.
Applications of Conditional Random Fields in Drone Technology
The ability of CRFs to handle sequential data, incorporate contextual information, and learn from complex relationships makes them exceptionally well-suited for a wide range of drone applications. From enhancing navigation and object detection to enabling sophisticated imaging analysis, CRFs are quietly powering the intelligence behind modern UAVs.
Object Tracking and Recognition
One of the most prominent applications of CRFs in drone technology is object tracking. Drones equipped with cameras are often tasked with following specific objects, whether it’s a person, a vehicle, or a piece of equipment. CRFs can model the temporal dynamics of an object’s appearance and motion. By observing a sequence of image frames, a CRF can predict the bounding box of the object in each subsequent frame, even in the presence of occlusions or changes in lighting.
Consider a drone performing surveillance. It needs to maintain a lock on a target vehicle as it moves through an urban environment. A CRF can learn features associated with the vehicle (color, shape, texture) and combine this with the dynamics of its movement (e.g., velocity, direction). It can also incorporate contextual information, such as knowing that vehicles typically stay on roads and tend to turn at intersections. The discriminative nature of CRFs allows them to learn the probability of the vehicle being at a certain location in the next frame, given its current location and appearance, along with the appearance of the surrounding scene.
Semantic and Instance Segmentation
For drones involved in mapping, inspection, or environmental monitoring, understanding the composition of the scene is critical. Semantic segmentation assigns a category label to every pixel in an image (e.g., “building,” “vegetation,” “water”). Instance segmentation goes a step further, distinguishing between individual instances of the same category (e.g., identifying each individual tree).
CRFs are widely used as a post-processing step to refine the initial segmentation results produced by deep learning models. Deep learning models might provide an initial pixel-wise classification, but these predictions can often be noisy and lack spatial coherence. By applying a CRF, we can leverage the spatial relationships between neighboring pixels. The CRF can penalize neighboring pixels being assigned different labels if their visual appearance is similar, or if they are spatially close and likely to belong to the same object. This “smoothing” effect leads to more accurate and visually coherent segmentation maps, which are crucial for tasks like agricultural monitoring (identifying crop types) or infrastructure inspection (detecting damaged sections of a bridge).
Action Recognition and Activity Understanding
In applications where drones need to understand the context of their environment beyond simple object identification, action and activity recognition becomes important. This could involve drones monitoring construction sites to understand worker activities or observing wildlife for ecological studies.
CRFs can be applied to sequences of video frames to recognize actions like “lifting,” “carrying,” or “driving.” By extracting features from multiple frames and considering how these features evolve over time, a CRF can infer the underlying action. The sequential nature of CRFs naturally lends itself to understanding temporal patterns, which are essential for distinguishing between different activities. For example, a drone observing a construction worker might use a CRF to distinguish between “operating a machine” and “standing idle” by analyzing the sequence of movements captured by its camera.
Advanced Features and Future Directions
While the fundamental principles of CRFs have been established for some time, ongoing research and development continue to enhance their capabilities and expand their applicability in drone technology. The integration of CRFs with deep learning architectures is a particularly exciting area.
Hybrid Models: Deep Learning and CRFs
Deep learning, especially Convolutional Neural Networks (CNNs), has revolutionized image analysis. CNNs are excellent at extracting hierarchical features from raw pixel data. However, they often struggle with capturing long-range dependencies and spatial context effectively, particularly in dense prediction tasks like segmentation.
This is where hybrid models come into play. A common approach is to use a CNN as a feature extractor, followed by a CRF to refine the output. The CNN generates rich feature maps from the input image, and these features are then fed into the CRF. The CRF uses these features to model the label dependencies and produce a more globally consistent and accurate prediction. This synergy allows us to benefit from the feature learning power of deep networks while leveraging the contextual reasoning capabilities of CRFs. This combination is a cornerstone of state-of-the-art performance in many computer vision tasks relevant to drones.
Real-time Processing and Computational Efficiency
For drones operating in dynamic environments, real-time processing is paramount. Traditional CRFs can be computationally intensive, especially for large images or long sequences. Research is focused on developing more efficient CRF inference algorithms and approximations. This includes techniques like mean-field approximations, belief propagation, and specialized hardware implementations.
Optimizing CRF inference for real-time applications allows drones to react instantaneously to their surroundings. Imagine a racing drone needing to make split-second decisions to navigate a complex track; efficient CRFs can contribute to faster obstacle avoidance and trajectory planning. Similarly, a delivery drone needs to accurately identify landing zones in real-time, and efficient segmentation powered by CRFs is crucial for this.
Beyond Vision: Multimodal Sensor Fusion
While much of the discussion has focused on visual data, CRFs are not limited to processing information from cameras. They can be extended to fuse data from multiple sensors onboard a drone, such as GPS, inertial measurement units (IMUs), LiDAR, and even audio sensors.
By treating data from different sensors as different types of observations, CRFs can learn complex relationships between them to achieve a more robust understanding of the environment. For example, a drone mapping an area might combine visual imagery with LiDAR point cloud data. A CRF could learn to correlate visual features of buildings with their 3D structures detected by LiDAR, leading to more accurate 3D reconstruction and mapping. This multimodal fusion capability is key to enabling more sophisticated autonomous behaviors and mission execution in diverse and challenging conditions.
In conclusion, Conditional Random Fields represent a sophisticated yet vital tool in the arsenal of drone technology. Their ability to model sequential data, leverage contextual information, and learn complex relationships makes them indispensable for tasks ranging from object tracking and scene understanding to sensor fusion and action recognition. As research continues to push the boundaries of computational efficiency and integration with cutting-edge deep learning techniques, CRFs will undoubtedly play an even more significant role in shaping the future of intelligent and autonomous aerial systems.