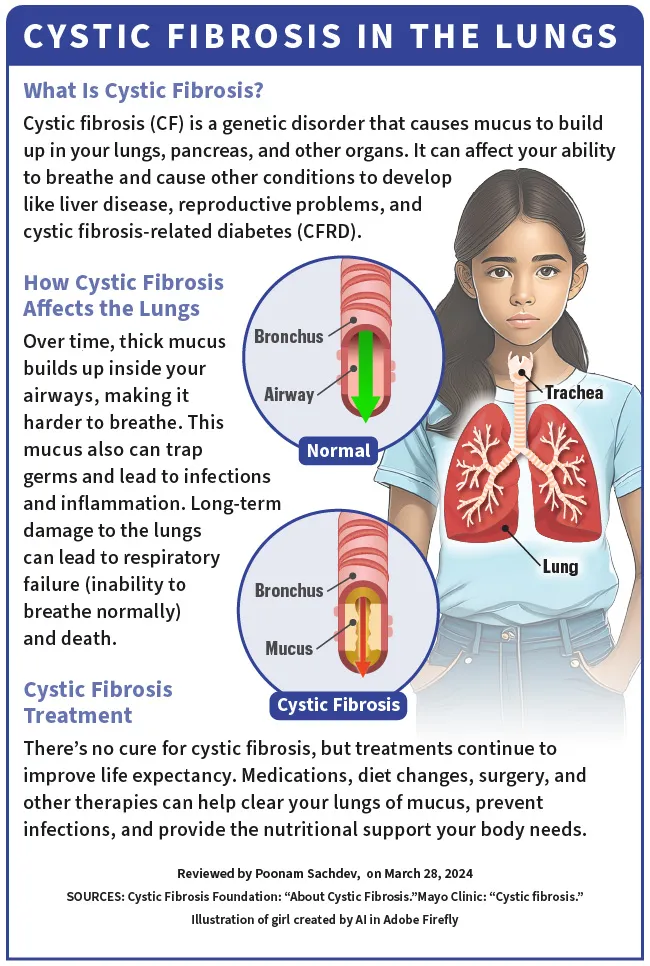
In the dynamic world of drone technology, particularly within the high-performance realms of FPV racing and freestyle, understanding the underlying flight technology is paramount. Among the crucial components that dictate a drone’s stability, responsiveness, and overall flight characteristics is the flight controller firmware. When one encounters “CF” in this context, it often refers to Cleanflight, a foundational open-source flight controller firmware that significantly shaped modern drone flight. Cleanflight is not merely a software package; it is a sophisticated piece of flight technology that acts as the brain of many quadcopters, processing sensor data and translating pilot commands into precise motor outputs to achieve stable and acrobatic flight. Its development marked a pivotal moment, offering enthusiasts and professionals an unprecedented level of control and customization over their drone’s aerial dynamics.
The Genesis and Evolution of a Core Flight System
Cleanflight emerged from a critical need for more sophisticated and performance-driven flight control solutions as mini quadcopters began their ascent in popularity. Prior to its arrival, drone enthusiasts often relied on less optimized or more complex proprietary systems. Cleanflight’s introduction democratized advanced flight control, making it accessible to a wider community and fostering rapid innovation within the hobby.
Origins and Purpose
Cleanflight began as a fork of Baseflight, another popular open-source flight control firmware. Developed by Dominic Clifton (hydra), Cleanflight was designed with a clear mandate: to improve flight performance, enhance configurability, and introduce new features specifically tailored for mini quadcopters and FPV racing. The core purpose was to provide a robust, reliable, and highly tunable platform that could manage the complex sensor fusion and control loop algorithms required for agile and stable multirotor flight. This involved meticulous optimization of code, introduction of new control algorithms, and support for a broader range of flight controller hardware. Its commitment to performance and low latency was a game-changer, allowing pilots to execute more precise maneuvers and push the boundaries of drone capability.
Open-Source Philosophy and Community Impact
The open-source nature of Cleanflight was central to its success and widespread adoption. By making the source code freely available, Cleanflight invited a global community of developers, pilots, and enthusiasts to contribute to its ongoing improvement. This collaborative model led to rapid bug fixes, feature additions, and extensive documentation, all driven by the collective experience of its users. The community’s active engagement fostered a rich ecosystem where knowledge was shared, problems were solved collectively, and new ideas could quickly be integrated. This open development environment not only accelerated the firmware’s evolution but also cultivated a vibrant culture of experimentation and innovation around drone flight technology. The impact extended beyond just the software itself, influencing hardware designs and setting new standards for flight controller capabilities within the FPV drone scene.
Technical Pillars of Cleanflight
Cleanflight’s success lies in its robust technical foundation, which comprises sophisticated architecture, diverse flight modes, and powerful tuning capabilities. These pillars work in concert to provide a versatile and high-performance flight experience.
Architecture and Supported Hardware
At its core, Cleanflight operates on a microcontroller, typically an STM32 series ARM processor, which is a common component of modern flight controllers. Its architecture is designed to efficiently process real-time data from various onboard sensors, including gyroscopes, accelerometers, magnetometers, and barometers. These sensors provide critical information about the drone’s orientation, movement, and altitude. Cleanflight’s firmware employs sophisticated sensor fusion algorithms to combine this data, compensating for individual sensor noise and providing a stable, accurate representation of the drone’s state in three-dimensional space. The firmware then utilizes this state information within its control loop to calculate the necessary motor adjustments.
Cleanflight supports a wide array of flight controller boards, ranging from early Naze32 and SP Racing F3 boards to more advanced F4 and F7 processors. Its modular design allows it to be adapted to different hardware configurations, often requiring only minor adjustments for pin assignments and peripheral support. This adaptability has been a key factor in its widespread adoption, as it allowed manufacturers to integrate Cleanflight into various drone builds without needing to develop proprietary flight control software from scratch. The configuration of Cleanflight is typically managed through a graphical user interface (GUI) called the Cleanflight Configurator, a Chrome app that provides an intuitive way to adjust parameters, calibrate sensors, and flash firmware.
Key Flight Modes and Stabilization Algorithms
Cleanflight offers a comprehensive suite of flight modes, each designed to cater to different pilot skill levels and flight objectives. The fundamental modes include:
- Angle Mode: A self-leveling mode where the drone automatically returns to a level orientation when the sticks are centered. This mode limits the maximum tilt angle, making it ideal for beginners.
- Horizon Mode: A hybrid mode that offers self-leveling at lower stick deflections but allows for full acrobatic maneuvers (flips and rolls) when the sticks are pushed to their limits.
- Acro (Rate) Mode: This is the preferred mode for experienced pilots, especially in FPV racing and freestyle. In Acro mode, the drone does not self-level; it maintains its last commanded angle. The pilot has direct control over the rotation rates (pitch, roll, yaw), requiring constant stick input for stabilization. This mode provides the most precise control and allows for complex aerial dynamics.
Beyond these core modes, Cleanflight includes other functionalities like Barometer mode for altitude hold, GPS support for position hold (though less common in FPV racing setups due to weight and complexity), and various auxiliary modes for features like arming/disarming and buzzer control.
The stabilization algorithms are at the heart of Cleanflight’s performance. It primarily relies on a Proportional-Integral-Derivative (PID) controller, a feedback loop mechanism that continuously calculates the error between the desired orientation (setpoint from the pilot) and the current orientation (measured by sensors). The P, I, and D terms independently contribute to the correction applied to the motors:
- Proportional (P): Reacts to the current error, providing immediate correction.
- Integral (I): Corrects for persistent errors over time, eliminating long-term drift.
- Derivative (D): Reacts to the rate of change of the error, anticipating and dampening oscillations.
Tuning these PID values is a critical aspect of optimizing flight performance, allowing pilots to tailor the drone’s responsiveness and stability to their specific hardware and flying style.
PID Tuning and Performance Optimization
PID tuning is an art and a science within the realm of Cleanflight and other flight firmwares. An improperly tuned drone can exhibit anything from sluggish response and drift to violent oscillations and instability, making flight difficult or impossible. The goal of PID tuning is to find the optimal balance between responsiveness (how quickly the drone reacts to commands) and stability (how well it maintains a desired orientation and resists disturbances).
Cleanflight provides extensive parameters within its configurator for fine-tuning PID values for pitch, roll, and yaw axes. Additionally, it offers features like rates, super rates, and expo, which allow pilots to adjust the responsiveness of the sticks around the center point and at their extremes, providing a more linear or exponential control feel. Advanced features include D-term filtering, which helps reduce prop wash oscillations and motor noise, and dynamic filtering, which adaptively filters noise based on motor RPMs, improving overall flight smoothness without introducing excessive latency. These intricate tuning capabilities underscore Cleanflight’s position as a robust piece of flight technology, empowering pilots to extract maximum performance from their drone hardware.
Cleanflight in the Drone Ecosystem
Cleanflight played a transformative role in the drone ecosystem, particularly for FPV enthusiasts. Its impact is visible in the proliferation of racing and freestyle drones, and its legacy continues to influence subsequent flight controller firmwares.
Impact on FPV Racing and Freestyle
The advent of Cleanflight coincided perfectly with the explosion of FPV racing and freestyle drone flying. Its high-performance, low-latency control algorithms, coupled with the precision offered by Acro mode, were exactly what pilots needed to push the boundaries of speed, agility, and aerial acrobatics. Cleanflight-powered drones became the standard for competitive racing, enabling pilots to navigate complex courses at high speeds with unparalleled precision. For freestyle pilots, the fine-tuned control allowed for intricate maneuvers like power loops, S-turns, dives, and rolls, creating visually stunning aerial choreography. The firmware’s configurability meant that pilots could customize their drone’s flight characteristics to match their personal flying style, an essential aspect for both competitive edge and creative expression. Without Cleanflight’s contributions, the FPV community might not have evolved as rapidly or reached the sophisticated level of flight control that is commonplace today.
Comparison with Betaflight and Other Firmware
While Cleanflight was a pioneer, the open-source nature of its development also led to forks and new projects. The most significant of these is Betaflight, which originated as an experimental fork of Cleanflight. Betaflight quickly gained popularity by introducing even faster loop times, more advanced filtering, and innovative new features that further improved flight performance, particularly for ultra-responsive racing and freestyle quads. Betaflight became the de facto standard for high-performance FPV drones, pushing the envelope even further.
Other firmwares like Butterflight (another fork of Cleanflight/Betaflight focused on unique filtering) and KissFC (a proprietary firmware known for its simplicity and excellent flight feel) also exist, offering different philosophies and feature sets. However, Cleanflight laid the groundwork for many of the concepts and algorithms that these subsequent firmwares built upon. Cleanflight remains a viable, stable option, particularly for those seeking a proven, reliable, and slightly less cutting-edge (but still highly capable) flight experience. Its legacy is undeniable, having demonstrated the potential of open-source development in transforming a niche hobby into a global phenomenon.
Configuration and User Experience
Cleanflight’s configuration is primarily handled through the Cleanflight Configurator, a cross-platform GUI. This tool provides an intuitive interface for managing all aspects of the flight controller. Users can connect their drone via USB and access a wide range of settings, including:
- PID Tuning: Adjusting proportional, integral, and derivative gains, along with rates and expo curves.
- Modes: Assigning flight modes (Acro, Angle, Horizon, etc.) to auxiliary switches on the radio controller.
- Ports: Configuring UARTs for peripherals like GPS, telemetry, and smart audio.
- Receiver Tab: Verifying stick inputs from the radio receiver.
- Motors Tab: Calibrating ESCs and testing motor functionality.
- CLI (Command Line Interface): For advanced users, the CLI allows direct interaction with the firmware, enabling access to all parameters and unique debug features.
The configurator’s visual layout and clear parameter descriptions made complex flight controller setup more accessible to a broad audience, significantly lowering the barrier to entry for customizing drone flight characteristics. This user-friendly approach, combined with comprehensive documentation generated by the community, ensured that pilots could effectively set up, tune, and maintain their Cleanflight-powered drones.
The Future Trajectory of Cleanflight
While Betaflight largely superseded Cleanflight in terms of active development and cutting-edge features for competitive FPV, Cleanflight’s place in drone history and its ongoing relevance are firmly established. It continues to be a robust and reliable option, and its contributions to flight technology are enduring.
Legacy and Continued Relevance
Cleanflight’s most significant legacy is its role as the foundational open-source firmware that catalyzed the modern FPV drone movement. It proved the viability of high-performance, customizable flight control for multirotors, inspiring countless developers and pilots. Even today, many of the fundamental concepts, algorithms, and even the architectural structure found in contemporary firmwares like Betaflight trace their lineage directly back to Cleanflight. For pilots seeking a stable, well-understood, and highly documented firmware, especially for less demanding applications or for learning the ropes of flight controller tuning, Cleanflight remains a perfectly capable choice. Its enduring stability makes it suitable for projects where reliability is paramount and bleeding-edge features are not the primary concern.
Contributions to Modern Flight Controllers
Cleanflight’s innovations were not confined to its own branch of development. Many of its pioneering features and optimizations were adopted, refined, and expanded upon by subsequent firmwares. Concepts such as advanced filtering techniques, specific PID controller implementations, configurable rates, and the overall framework for integrating various sensors and peripherals were either developed or significantly popularized by Cleanflight. It helped establish the standards for how flight controllers interpret pilot input, manage motor outputs, and stabilize an aircraft in dynamic conditions. The robust configurator interface, allowing for detailed tuning and diagnostics, also set a benchmark for user interaction with complex flight technology. In essence, Cleanflight provided much of the technological bedrock upon which the sophisticated, acrobatic, and high-speed drone flight we witness today was built. It remains a crucial chapter in the evolution of drone flight technology, cementing its place as a significant .cf in the drone world.