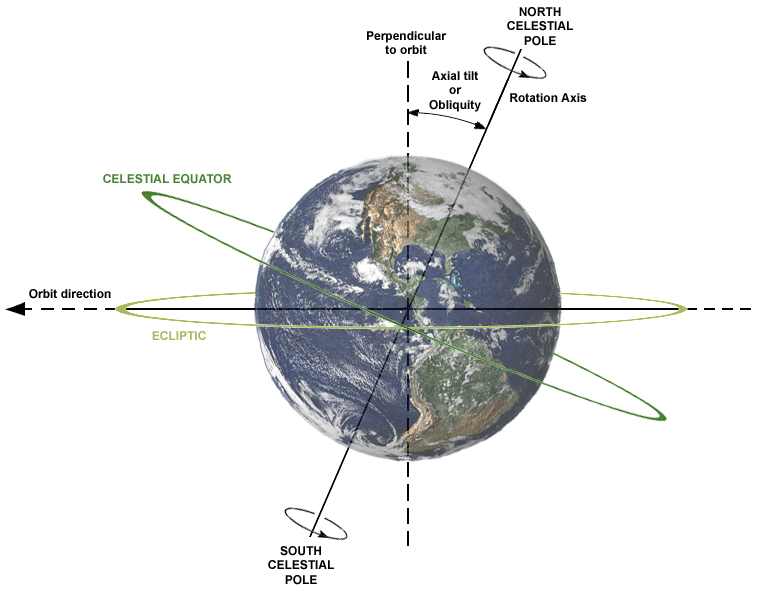
The Earth’s axis is an imaginary line passing through its center, around which it rotates. This fundamental geophysical concept underpins nearly all forms of navigation and stabilization in aerospace, particularly for sophisticated flight technology like that found in modern drones and UAVs. Without a precise understanding of this axis and its dynamic behavior, accurate global positioning, stable flight, and reliable remote sensing would be impossible. The primary axis of interest for flight technology is the rotational axis, which defines the planet’s daily spin, giving rise to day and night. This axis intersects the Earth’s surface at the North and South Poles. However, it’s not a static or perfectly fixed line in space or relative to the Earth’s crust. Its subtle movements and the Earth’s rotation around it create complex challenges and opportunities for engineers developing advanced flight systems.
Defining Earth’s Rotational Axis and its Kinematics for Flight
The Celestial Compass: Latitude, Longitude, and Reference Frames
The Earth’s rotational axis provides the foundational reference for defining geographic coordinates: latitude and longitude. Latitude measures distance north or south of the equator, which is an imaginary circle equidistant from the poles, perpendicular to the rotational axis. Longitude measures distance east or west of the Prime Meridian, a human-defined line passing through Greenwich, England, also aligned with the rotational axis. For any aircraft, whether a commercial jet or a micro-drone, knowing its precise latitude and longitude is paramount for navigation. Flight technology employs various sensors and systems—from magnetometers referencing the magnetic north (which deviates from true north defined by the rotational axis) to advanced GPS receivers—to pinpoint its location within this global grid. Furthermore, understanding the Earth’s orientation relative to celestial bodies (historically via stars, currently via satellites) allows for the establishment of an inertial reference frame, which is crucial for determining true heading and motion independent of local disturbances. Modern flight control systems, particularly for autonomous drones, continuously reconcile data from multiple sensors within a geodetic reference frame that is tied directly to the Earth’s rotational axis, ensuring consistent and accurate flight paths across vast distances.
Precession, Nutation, and Polar Motion: Dynamic Considerations
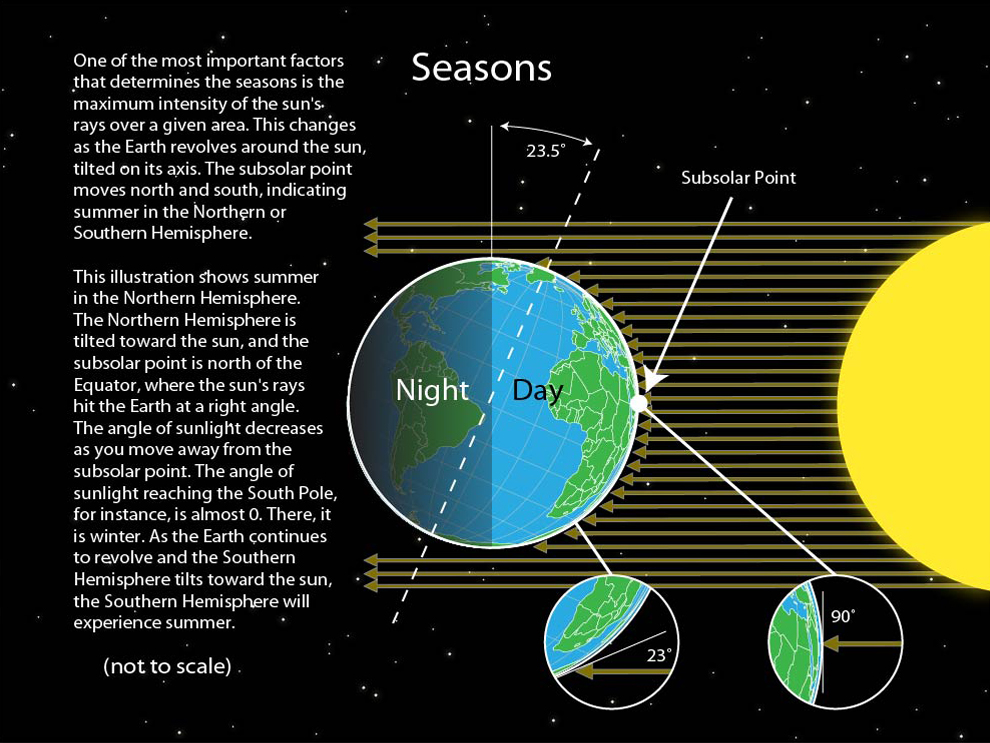
While often conceptualized as fixed, the Earth’s rotational axis exhibits several complex dynamic behaviors that are critical for ultra-high-precision flight technology. These include precession, nutation, and polar motion. Precession is a slow wobble of the Earth’s axis, caused primarily by the gravitational pull of the Sun and Moon on the Earth’s equatorial bulge. This wobble causes the celestial poles to trace out a circle in the sky over approximately 25,800 years. Superimposed on this long-term precession are smaller, shorter-period oscillations known as nutation, mainly due to variations in the Moon’s orbital plane. Finally, polar motion refers to the slight shifting of the Earth’s rotational axis with respect to its crust, meaning the geographic North and South Poles are not absolutely fixed points on the surface. These phenomena are incredibly subtle but can accumulate into significant errors for long-duration missions or applications requiring centimeter-level accuracy, such as advanced mapping or remote sensing with UAVs. Modern flight navigation systems, especially those incorporating Real-Time Kinematic (RTK) or Post-Processed Kinematic (PPK) GPS, must account for these axial dynamics. Ephemeris data, which precisely predicts the positions of celestial bodies and the Earth’s orientation, is regularly updated and integrated into sophisticated navigation algorithms to compensate for these continuous shifts, ensuring that onboard sensors and positioning systems maintain their accuracy relative to the true Earth reference frame.
Global Positioning Systems (GPS) and Earth’s Axis
The Global Positioning System (GPS), along with other Global Navigation Satellite Systems (GNSS) like GLONASS, Galileo, and BeiDou, is arguably the most transformative flight technology of the modern era. Its very operation is intricately linked to the precise understanding of the Earth’s rotational axis and its orbital mechanics. GPS receivers onboard drones calculate their position by trilaterating signals from multiple satellites. These calculations critically depend on knowing the exact position of each satellite in space at the precise moment its signal was transmitted, and this, in turn, requires an accurate model of the Earth’s orientation.
Satellite Orbits and the Terrestrial Reference Frame
GPS satellites orbit the Earth in precisely defined paths. To ensure global coverage and accurate positioning, the ground control segments constantly monitor and predict these orbital trajectories relative to a stable terrestrial reference frame. This terrestrial frame is meticulously aligned with the Earth’s rotational axis and accounts for its various dynamic motions. The satellite ephemeris data—information about their orbital parameters and positions over time—is continuously broadcast to GPS receivers. For a drone’s GPS unit to correctly interpret these signals and determine its own location, it must effectively reconcile the satellite’s position in space (an inertial frame) with its own position on the Earth’s rotating surface (a terrestrial frame). This conversion involves complex algorithms that incorporate the Earth’s rotation rate and its precise orientation at any given moment, directly referencing the rotational axis. Without this constant synchronization and understanding of the Earth’s axial rotation, the calculated positions would drift significantly, rendering GPS navigation unreliable for flight.

Time Synchronization and Relativistic Effects
Beyond spatial positioning, GPS relies on extraordinary temporal accuracy. Each GPS satellite carries atomic clocks, and these clocks are synchronized to a common GPS time, which is then linked to Universal Coordinated Time (UTC). The concept of time itself, as experienced by the satellites and receivers, is affected by relativistic effects due to the satellites’ high speed and their altitude within Earth’s gravitational field. Einstein’s theories of special and general relativity predict that time will pass slower for the rapidly moving satellites and faster due to their weaker gravitational exposure compared to a receiver on Earth’s surface. These relativistic effects, though tiny, accumulate rapidly and would introduce positioning errors of many kilometers per day if not precisely corrected. The rotation of the Earth, defined by its axis, contributes to the specific reference frame within which these relativistic corrections are calculated. Furthermore, the timing of signal transmission and reception must account for the Earth’s rotation during the signal’s travel time from satellite to receiver. A drone’s GPS receiver, therefore, doesn’t just measure signal arrival times; it factors in the time-varying distances, the satellite’s precise orbital velocity, and crucially, the relative motion caused by the Earth’s axial rotation to convert raw signal data into accurate coordinates. This intricate interplay of physics, precise timekeeping, and understanding Earth’s axis allows for the unparalleled accuracy that GPS provides to modern flight technology.
Inertial Navigation Systems (INS) and Earth’s Rotation Compensation
While GPS provides absolute positioning, it can be susceptible to signal loss or jamming. Inertial Navigation Systems (INS) offer a complementary solution by tracking an aircraft’s position and orientation relative to a known starting point without external signals. An INS consists of gyroscopes that measure angular velocity and accelerometers that measure linear acceleration. The performance and accuracy of an INS, particularly for long-duration or high-precision drone flights, are profoundly affected by the Earth’s rotation around its axis.
Gyroscopes and Accelerometers in a Rotating Frame
The core components of an INS—gyroscopes and accelerometers—do not inherently “know” about the Earth’s rotation. They simply measure angular rates and accelerations relative to their own local frame. For these measurements to be useful for global navigation, they must be transformed into a common, Earth-fixed reference frame. This transformation requires precise knowledge of the Earth’s angular velocity vector, which is directed along its rotational axis. Without compensating for the Earth’s rotation, a gyroscope that appears “still” relative to an Earth-fixed coordinate system would actually detect a continuous drift in its measurements, simply due to the platform rotating with the planet. Similarly, accelerometers, especially highly sensitive ones, would register fictitious accelerations if the rotational effects were ignored. Therefore, INS algorithms continuously integrate the Earth’s rotation rate into their calculations. This involves sophisticated mathematical models that account for the changing orientation of the sensor frame relative to the fixed stars and, crucially, relative to the Earth’s own spin, enabling the system to distinguish between genuine aircraft motion and the apparent motion caused by the planet’s rotation.
Coriolis Effect and Apparent Forces
A particularly important phenomenon in the context of an INS on a rotating Earth is the Coriolis effect. This is an apparent force that acts on moving objects within a rotating reference frame, deflecting their path. While often discussed in the context of large-scale weather patterns, it also subtly but significantly affects the measurements within an INS. For a drone flying at speed, the Coriolis force will act perpendicular to both the drone’s velocity and the Earth’s rotational axis. Although small for typical drone speeds and altitudes, for systems requiring high precision and long endurance, the Coriolis effect must be meticulously calculated and compensated for. Failure to do so would lead to accumulating errors in estimated velocity and position, progressively drifting the drone off course. Modern INS units, often combined with GPS (forming a tightly coupled GNSS/INS system), employ complex Kalman filters and sophisticated algorithms that continuously predict and correct for the Coriolis acceleration, integrating the Earth’s precise rotational vector into their state estimation. This allows the INS to output accurate velocity and position data in an Earth-fixed frame, providing robust navigation even in environments where GPS signals are intermittent or unavailable.
Stabilization and Control: Counteracting Terrestrial Dynamics
Beyond navigation, the Earth’s rotational axis plays a subtle yet critical role in the stabilization and control systems of drones. Maintaining a stable platform, especially for aerial photography, surveying, or precise cargo delivery, requires an understanding of how the drone interacts with its environment, including the dynamic nature of the planet it flies over.
Gimbal Systems and Horizon Referencing
Gimbal systems are ubiquitous in aerial imaging, providing smooth, level footage regardless of the drone’s orientation. These systems rely on gyroscopes and accelerometers to sense the gimbal’s angular position and velocity relative to the local vertical and horizontal. The concept of “level” or “horizon” is directly derived from the Earth’s gravitational field, which points towards the Earth’s center—a point implicitly defined by the Earth’s mass distribution and its rotational axis. While a gimbal’s IMU (Inertial Measurement Unit) primarily works in a local reference frame, for persistent stabilization over long durations or across significant distances, the system must consider the curvature of the Earth and the changing direction of “down.” More advanced gimbal systems, often integrated with the drone’s flight controller, will incorporate GPS data to understand the drone’s global position and attitude, allowing them to account for the Earth’s true horizon, rather than just a locally perceived one, particularly when operating near the poles where magnetic compasses become unreliable and the rotational axis becomes more pronounced in local measurements. The Earth’s rotation also influences subtle shifts in the apparent horizon over time, which sophisticated stabilization algorithms must indirectly factor in to maintain perfect camera orientation.
Advanced Autopilots and Geodetic Models
Modern drone autopilots are incredibly complex systems that integrate data from a multitude of sensors—GPS, IMU, barometers, magnetometers, and sometimes optical flow sensors or lidar. The overarching goal of these systems is to maintain desired flight parameters (altitude, heading, speed) and execute predefined flight paths with precision. All these operations are ultimately referenced to the Earth’s surface and its orientation in space. The Earth’s rotational axis is embedded within the geodetic models used by these autopilots. These models define the shape of the Earth (an oblate spheroid, flattened at the poles due to rotation) and provide the framework for converting sensor readings into meaningful geographic coordinates and motion vectors. For instance, when a drone flies a precisely planned mapping mission, the autopilot must compensate for the Earth’s curvature and its rotation to ensure that the sensor data is accurately georeferenced. In high-precision agricultural spraying or inspection tasks, even minute errors due to unaccounted-for rotational effects can lead to significant discrepancies over large areas. Therefore, the algorithms governing advanced autopilots contain parameters derived directly from the Earth’s axial rotation, allowing them to perform complex maneuvers, maintain rock-solid stability, and execute autonomous missions with unprecedented accuracy, all while implicitly navigating and stabilizing within the dynamic framework provided by our spinning planet. The continuous effort to refine these models and integrate real-time Earth orientation parameters is a testament to the critical role the Earth’s axis plays in advancing flight technology.