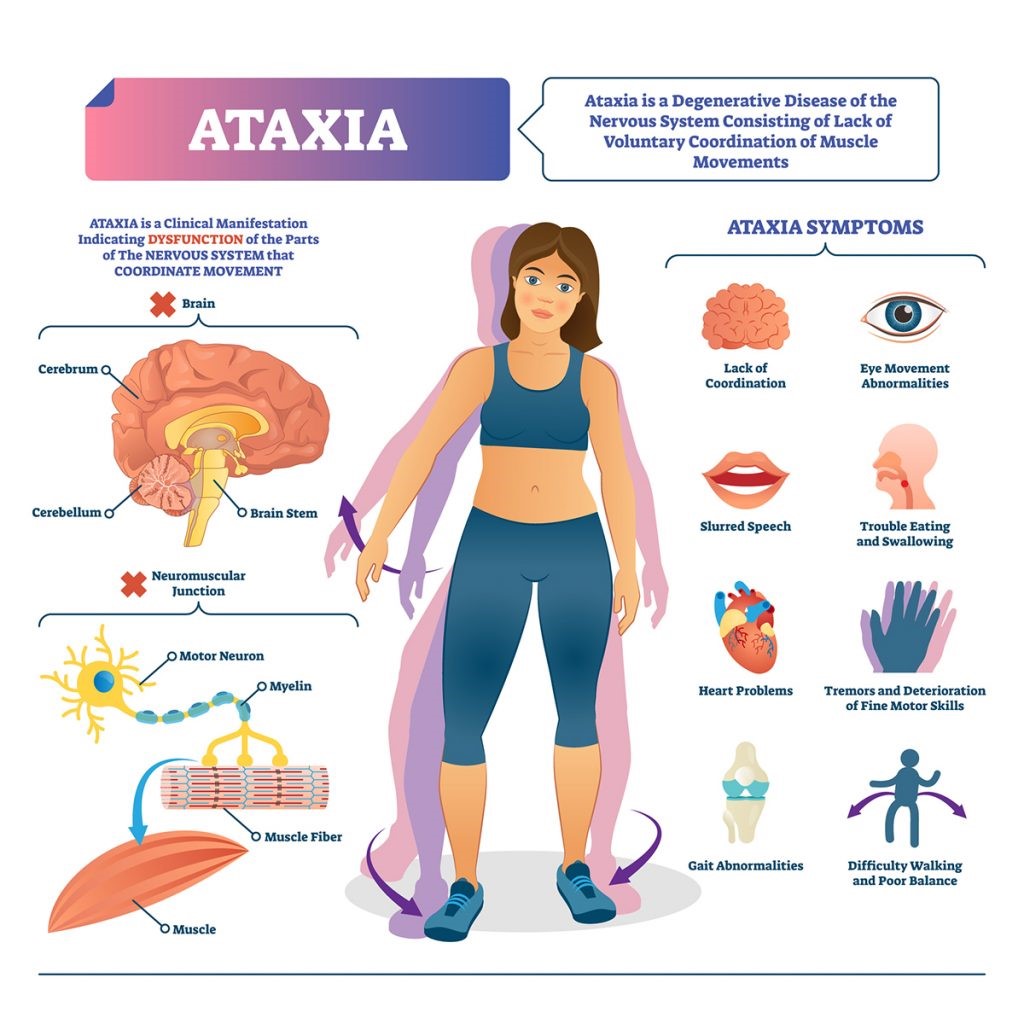
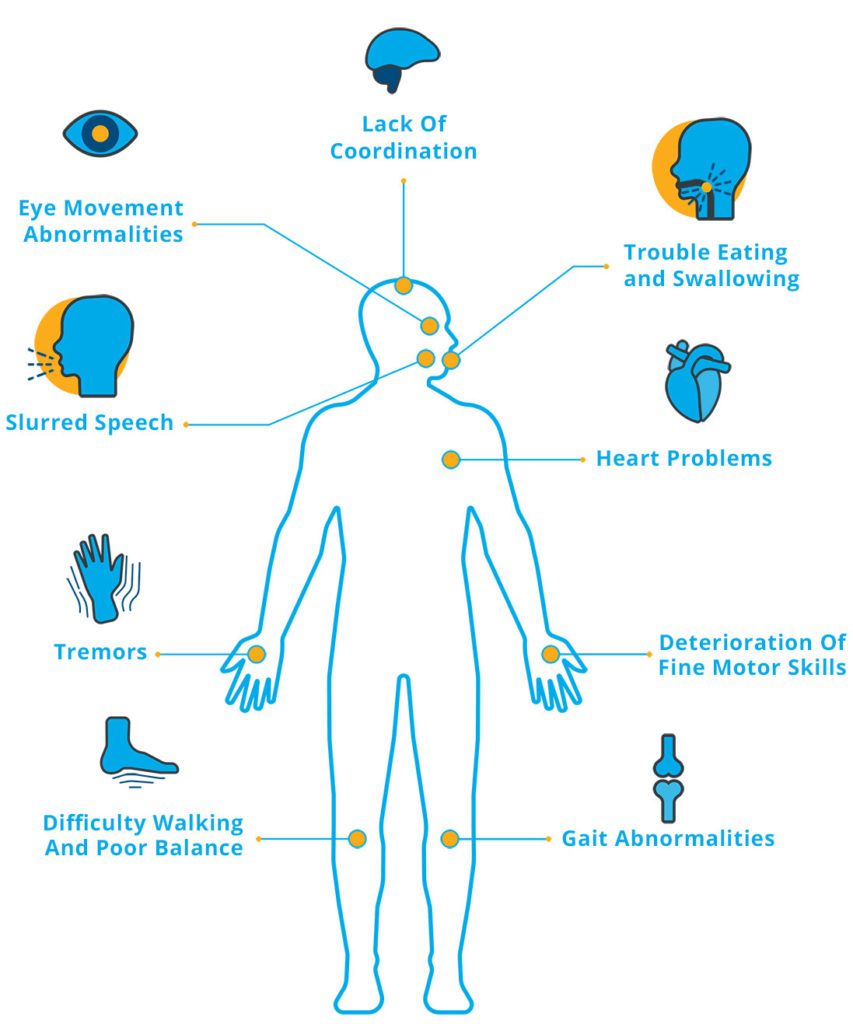
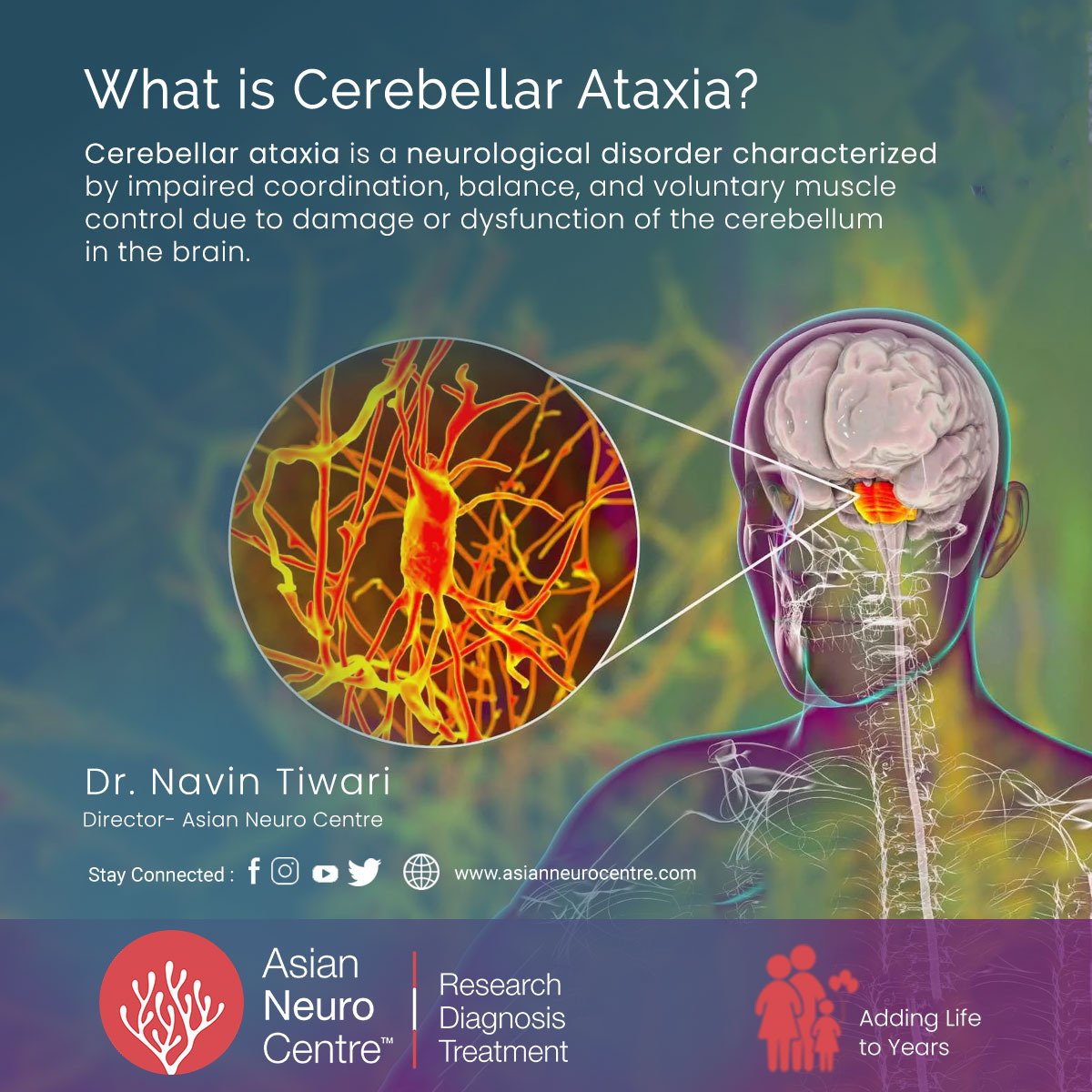
In the world of advanced robotics and unmanned aerial vehicles (UAVs), the quest for perfect equilibrium is relentless. When we discuss “ataxia cerebellar” within the context of flight technology, we are not looking at a medical diagnosis in the traditional sense, but rather a sophisticated engineering challenge and a bio-inspired solution. In humans, the cerebellum is the region of the brain responsible for coordinating voluntary movements, posture, and balance. When it malfunctions, the result is ataxia—a lack of muscle coordination. In the realm of drone flight technology, “cerebellar ataxia” refers to the catastrophic failure of stabilization systems or, more interestingly, the development of “Cerebellar Model Articulation Controllers” (CMAC) designed to prevent such instability.
To understand what ataxia cerebellar means for modern flight technology, one must look at how drones mimic biological systems to achieve precision. This intersection of neuroscience and aerospace engineering has led to the development of flight controllers that function as synthetic cerebellums, processing sensory input to ensure that every tilt of a rotor and every adjustment of a motor is executed with fluid, organic precision.
The Biological Blueprint: How the Cerebellum Inspires UAV Flight Control
The human cerebellum is a masterpiece of real-time data processing. It receives information from the sensory systems, the spinal cord, and other parts of the brain to regulate motor movements. It is the reason a person can walk on uneven ground without falling. For a drone, the “ground” is the turbulent air, and the “sensory systems” are its arrays of GPS, gyroscopes, and accelerometers.
Translating Biology into Flight Algorithms
Flight controllers have traditionally relied on Proportional-Integral-Derivative (PID) loops. While effective, PID loops are often rigid. They react to errors rather than anticipating them. Bio-inspired flight technology seeks to move beyond this by implementing neural networks modeled after the cerebellum. These systems allow a drone to “learn” its own dynamics. If a drone suffers from mechanical “ataxia”—perhaps due to a chipped propeller or a shifting payload—a cerebellar-inspired controller can adapt in real-time, compensating for the lack of coordination and restoring stable flight.
The Role of Feedforward Control
In biological systems, the cerebellum provides “feedforward” control. This means it predicts the sensory consequences of an action before the action is even completed. In flight technology, this translates to predictive modeling. Instead of waiting for a gust of wind to tilt the drone and then correcting it (feedback), a cerebellar-modeled system senses the initial pressure change and adjusts the motor RPMs instantaneously to cancel out the movement. This prevents the “jitter” or “oscillation” that characterizes robotic ataxia.
Overcoming Mechanical Ataxia: Advanced Stabilization Systems in Modern Drones
When a drone experiences flight ataxia, it exhibits erratic behavior: drifting, wobbling, or failing to maintain a steady altitude. To combat this, flight technology has evolved to include an “inner ear” far more sensitive than those found in nature. This is the Inertial Measurement Unit (IMU), the heart of drone stabilization.
The IMU and the Vestibular System
The IMU is the technological equivalent of the vestibular system located in the human inner ear. It consists of accelerometers that measure linear acceleration and gyroscopes that measure angular velocity. High-end flight technology often utilizes redundant IMUs—multiple sensors working in tandem to cross-reference data. If one sensor begins to provide “ataxic” data (noise or drift), the cerebellar flight controller identifies the outlier and relies on the healthy sensors to maintain equilibrium.
Magnetometers and Barometers: Spatial Awareness
To prevent directional ataxia, drones utilize magnetometers (digital compasses) and barometers (pressure sensors). The magnetometer ensures the drone knows its heading relative to the Earth’s magnetic field, preventing “toilet-bowling”—a specific type of circular instability where the drone loses its sense of direction and begins to spiral. The barometer acts as the fine-tuning mechanism for altitude, allowing the drone to “feel” the air pressure and maintain a precise hover even when GPS signals are weak.
Optical Flow and Visual Odometry
For true precision, especially in environments where GPS is unavailable, flight technology utilizes optical flow sensors. These are downward-facing cameras that track the movement of the ground at high speeds. By processing these images, the drone’s “cerebellum” can detect even the slightest horizontal drift and correct it. This creates a level of stability that mimics a bird hovering in a headwind, a feat of coordination that requires immense processing power.
Algorithms and Adaptive Control: Preventing Flight Instability
The software side of flight technology is where the concept of “ataxia cerebellar” is truly addressed. The most significant advancement in this field is the Cerebellar Model Articulation Controller (CMAC). This is a type of neural network that is specifically designed for the control of robotic systems with complex, non-linear dynamics.
Understanding CMAC in Flight Tech
CMAC functions by mapping input states (like the current tilt and wind speed) to a series of memory locations, which then output the necessary motor commands. Unlike a standard computer program that follows a “if-then” logic, CMAC learns from experience. If a drone is flying in a specific high-altitude environment with thin air, the CMAC adjusts its output to account for the reduced lift. It effectively “trains” the drone to avoid the clumsy, uncoordinated movements associated with traditional flight controllers in extreme conditions.
Error Correction and Latency Reduction
One of the primary causes of ataxia in drones is latency—the delay between a sensor detecting a movement and the motor responding to it. Advanced flight technology uses “Extended Kalman Filters” (EKF) to predict the state of the drone. By blending data from various sensors, the EKF provides the flight controller with a “best guess” of the drone’s position and velocity in real-time. This eliminates the lag that leads to over-correction, which is the mechanical equivalent of the tremors seen in cerebellar disorders.
Gain Scheduling and Dynamic Adaptation
Flight conditions change. A drone might start a flight with a full battery and a heavy camera, but finish it light and with lower voltage. “Gain scheduling” is a technique where the flight controller changes its sensitivity (or “gains”) based on these variables. Without this, a drone might become “hyper-reactive” or “sluggish,” both forms of flight ataxia. Modern autonomous systems use AI to manage these gains dynamically, ensuring that the control feel remains consistent regardless of the physical state of the aircraft.
The Future of Autonomous Precision: From Bio-Mimicry to Perfect Equilibrium
As we look toward the future of flight technology, the goal is to move beyond mere stabilization and into the realm of “perfect coordination.” This involves the integration of even more complex “cerebellar” functions, such as obstacle avoidance and autonomous path planning in chaotic environments.
Obstacle Avoidance and Reflexive Flight
A human with a healthy cerebellum can move through a crowded room without thinking about it. Drones are achieving this through “Sense and Avoid” technology. Using LiDAR, ultrasonic sensors, and binocular vision, drones create a 3D map of their surroundings. The flight controller must process this map and adjust the flight path reflexively. If an object appears suddenly, the drone doesn’t just stop; it maneuvers around it with a fluidity that was previously impossible. This is the antithesis of ataxia—it is high-level coordination.
Swarm Intelligence and Collective Coordination
Perhaps the most ambitious application of cerebellar flight technology is in drone swarming. In a swarm, dozens or even thousands of drones must coordinate their movements to avoid colliding while moving as a single unit. This requires a “collective cerebellum”—a distributed network where each drone shares its spatial data with its neighbors. The result is a mesmerizing display of synchronized flight that looks more like a flock of starlings than a group of machines.
Remote Sensing and Environmental Adaptation
Future innovations will likely see drones that can sense air density, humidity, and electromagnetic interference before they even enter a specific airspace. By integrating remote sensing into the stabilization loop, the flight controller can prepare for atmospheric shifts that would otherwise cause instability. This level of foresight represents the pinnacle of flight technology: a system so well-coordinated that “ataxia” is no longer a risk, but a relic of the past.
In conclusion, “ataxia cerebellar” in the context of flight technology serves as a vital metaphor for the challenges of drone stabilization. By looking to the biological cerebellum for inspiration, engineers have moved away from rigid, reactive systems toward adaptive, predictive controllers. Through the use of advanced IMUs, neural networks like CMAC, and sophisticated filtering algorithms, modern drones have achieved a level of grace and precision that mimics life itself. As these technologies continue to evolve, the line between mechanical flight and biological movement will continue to blur, leading us toward an era of truly autonomous and perfectly coordinated aerial machines.