In the dynamic realm of drone technology, particularly within the cutting-edge domain of Tech & Innovation, the concept of “iterative” is not merely a technical term but a fundamental philosophy underpinning the development and operation of intelligent, autonomous systems. An iterative process, at its core, involves the repetition of a sequence of operations or calculations, with each successive repetition bringing the system closer to a desired state or refined outcome. It is a cyclical approach to problem-solving, design, and control, where results from one step inform and improve the next. For drones engaged in AI follow mode, autonomous flight, sophisticated mapping, and remote sensing, iteration is the engine of learning, adaptation, and precision. It allows complex systems to evolve, correct errors, and continuously optimize their performance in unpredictable environments, transforming raw data into actionable intelligence and rudimentary commands into graceful, intelligent maneuvers.
The Core of Iteration in Advanced Drone Systems
The significance of iterative processes in advanced drone technology cannot be overstated. Unlike simpler, pre-programmed machines, modern drones, especially those leveraging AI and advanced sensing, operate in highly complex and variable environments. They need to adapt, learn, and respond in real-time, which necessitates a framework that allows for continuous refinement. An iterative approach provides this framework, enabling systems to make incremental improvements, correct deviations, and converge towards optimal solutions.
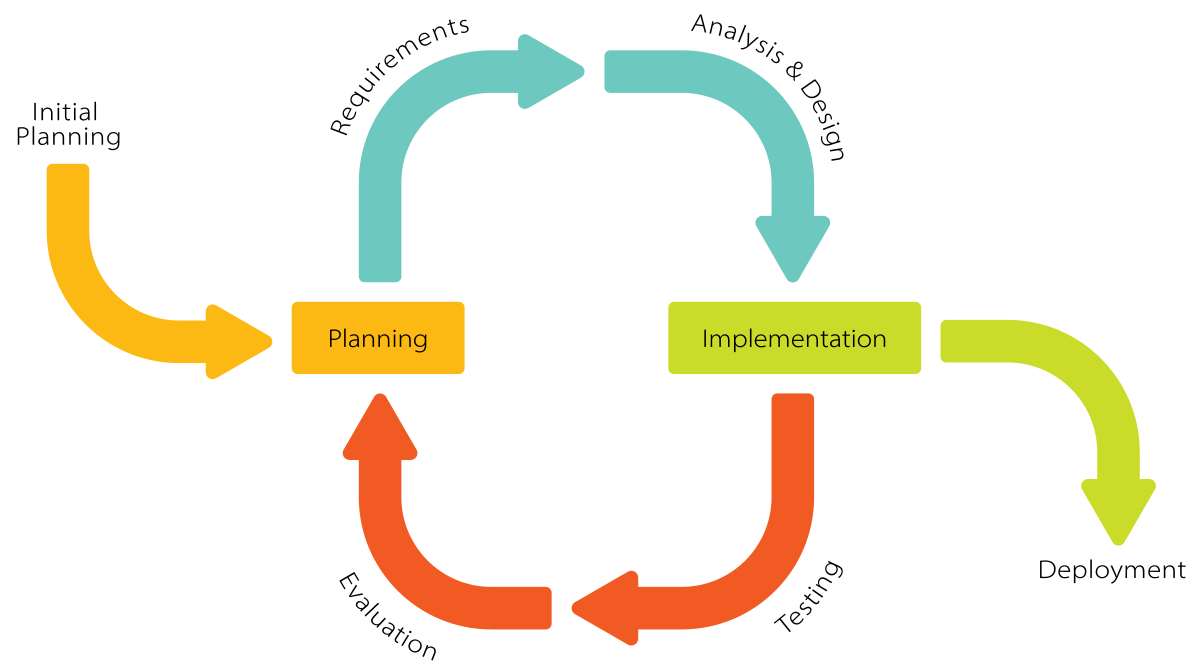
Consider the development of an autonomous drone. From its initial design to its deployment, every stage involves iteration. Engineers might design a control algorithm, test it in simulation, identify areas for improvement, modify the algorithm, and then repeat the cycle. This applies not just to the development phase but also to the operational phase where the drone constantly takes in data, processes it, makes decisions, executes actions, and then uses the feedback from those actions to refine its subsequent decisions. This feedback loop is the heart of iteration, allowing systems to learn from experience and adjust their behavior. Without iteration, the sophisticated capabilities we see in drones today—such as navigating complex terrains, precisely following moving targets, or generating highly accurate 3D maps—would be impossible to achieve with the required level of robustness and intelligence.
Iterative Processes in AI-Powered Autonomy
Artificial intelligence is intrinsically iterative, and nowhere is this more apparent than in its application to drone autonomy, particularly in features like AI follow mode and intelligent object recognition. The ability of a drone to identify, track, and predict the movement of a subject, or to make complex decisions without human intervention, stems directly from iterative learning and refinement.
Machine Learning Training Loops
The foundation of AI in drones lies in machine learning models, which are trained through extensive, iterative processes. A drone’s ability to distinguish between a human, a vehicle, or an animal for AI follow mode, for example, is developed by feeding it vast datasets of images and videos. In each training iteration, the model makes a prediction, compares it to the ground truth, calculates an error, and then adjusts its internal parameters (weights and biases) to minimize that error. This cycle of prediction, error assessment, and parameter adjustment is repeated thousands, sometimes millions, of times, gradually refining the model until it achieves high accuracy in recognizing and categorizing objects in real-world scenarios. Each iteration brings the model closer to a state where it can reliably perceive and interpret its environment, making autonomous functions more robust and intelligent.
Adaptive Control and Reinforcement Learning
Beyond initial training, iterative processes empower drones to adapt their behavior in real-time through techniques like reinforcement learning. In adaptive control, a drone continuously monitors its performance and the environment, iteratively adjusting its control parameters to maintain optimal flight characteristics or achieve specific mission objectives. If wind conditions change, an adaptive controller will iteratively modify motor outputs to counteract the disturbance and maintain a stable position or trajectory.
Reinforcement learning takes this a step further. Here, an AI agent (the drone) learns to make a sequence of decisions by interacting with its environment. It performs an action, receives a “reward” or “penalty” based on the outcome, and iteratively refines its decision-making policy to maximize cumulative rewards over time. For an AI follow mode, the drone might iteratively learn the optimal speed and altitude to maintain a smooth follow, or how to anticipate a subject’s movements, by being rewarded for successful tracking and penalized for losing sight or collisions. This continuous loop of action, feedback, and policy update is a powerful form of iteration that drives true autonomy and intelligence.
Precision and Resilience Through Iterative Flight Control

Autonomous flight demands an exceptional level of precision and resilience, especially when performing complex maneuvers or operating in challenging conditions. Iterative control systems are the backbone of this capability, allowing drones to continuously refine their actions, from maintaining stable flight to executing intricate mission paths and avoiding dynamic obstacles.
Real-time Feedback Loops for Stability
The fundamental stability of any drone relies heavily on iterative control loops, most commonly proportional-integral-derivative (PID) controllers. These systems continuously measure the drone’s current state (e.g., orientation, altitude, position) using sensors like gyroscopes, accelerometers, and GPS. They then compare this measured state to a desired setpoint. The error between the current and desired state is fed into the PID algorithm, which iteratively calculates the necessary corrections to the motor speeds. This process occurs hundreds, if not thousands, of times per second. Each iteration slightly adjusts the motor output, bringing the drone closer to its target orientation or position. This constant, high-frequency iteration ensures that the drone remains stable even in the presence of external disturbances like wind gusts, providing the reliability necessary for any autonomous mission.
Dynamic Path Optimization and Obstacle Avoidance
For truly autonomous flight, drones must not only remain stable but also navigate complex environments, plan optimal paths, and react to unforeseen obstacles. These tasks are inherently iterative. Path planning algorithms often explore various routes, iteratively refining a chosen path based on criteria like energy efficiency, mission constraints, and collision risk. As the drone flies, its sensors (Lidar, sonar, cameras) continuously scan for obstacles. If an obstacle is detected, the drone’s navigation system initiates an iterative replanning process. It rapidly evaluates alternative trajectories, selects the safest and most efficient bypass, and then iteratively updates its flight commands to execute the new path. This dynamic, iterative re-evaluation and adjustment ensures the drone can safely complete its mission even in highly dynamic and unpredictable settings, making autonomous package delivery or infrastructure inspection feasible and secure.
Refining Reality: Iterative Methods in Mapping and Remote Sensing
Drones equipped with advanced cameras and sensors are revolutionizing mapping and remote sensing, transforming how we gather geospatial data and monitor environments. The process of turning raw aerial data into highly accurate 2D maps, 3D models, or actionable insights is heavily dependent on iterative methodologies.
Photogrammetric Reconstruction and Error Correction
Photogrammetry, the science of making measurements from photographs, is a prime example of an iterative process in drone mapping. Drones capture hundreds or thousands of overlapping images of an area. Software then iteratively processes these images to reconstruct a 3D model. In each iteration, the software identifies common features across multiple images, triangulates their positions in 3D space, and then refines the camera positions and orientations. This iterative bundle adjustment process minimizes projection errors, leading to increasingly accurate and dense point clouds and textured 3D models. As more features are matched and more accurate camera parameters are calculated through successive iterations, the overall geometric fidelity and detail of the reconstructed environment improve dramatically, allowing for precise measurements and detailed visualization of terrains, buildings, and infrastructure.
Multi-spectral Analysis and Environmental Modeling
Remote sensing with drones involves collecting data beyond the visible light spectrum, such as near-infrared or thermal imagery, to gain insights into vegetation health, water quality, or heat signatures. Analyzing this data often requires iterative approaches, especially when building predictive models or detecting subtle changes over time. For instance, classifying different crop types or assessing stress levels might involve iterative clustering algorithms that group pixels with similar spectral characteristics. Environmental modeling, such as predicting soil moisture content or crop yields, can use iterative optimization techniques to calibrate models against ground truth data, refining the model’s parameters until its predictions closely match observed values. Furthermore, monitoring environmental changes over time frequently involves iterative comparisons of datasets collected at different periods, allowing scientists to iteratively identify trends, anomalies, and the efficacy of environmental interventions. Each cycle of data collection, processing, analysis, and model refinement contributes to a deeper, more accurate understanding of our planet.
The Future of Iteration in Drone Innovation
The concept of iteration is not just a current technical necessity; it is a driving force for future innovation in drone technology. As drones become more sophisticated, integrating advanced AI, swarming capabilities, and tighter human-machine interfaces, the iterative paradigm will continue to expand in scope and complexity. Future drones will leverage ever more intricate iterative learning models to perform complex tasks collaboratively, learn from human operators in real-time, and adapt to entirely novel situations with minimal pre-programming.
For instance, the development of truly autonomous drone swarms will rely on iterative communication and coordination algorithms, where individual drones continuously adjust their behavior based on the actions and states of their peers, iteratively converging on optimal collective strategies for exploration, surveillance, or rescue. Similarly, advancements in human-drone interaction will feature iterative feedback loops, allowing drones to learn user preferences, anticipate commands, and refine their responses through continuous interaction and adaptation. From developing more energy-efficient flight profiles to predicting maintenance needs and fostering advanced collaborative intelligence, the iterative process will remain at the heart of pushing the boundaries of what drones can achieve, creating systems that are not just smart, but truly intelligent, adaptive, and endlessly capable.