In the intricate world of flight technology, precision, efficiency, and safety are paramount. Behind every stable hover, every precisely executed maneuver, and every intelligent navigation decision lies a complex interplay of mathematical principles. Among these, the concept of “extrema” stands as a cornerstone, fundamental to understanding how drones operate, optimize their performance, and interact with their environment. Far from being a mere abstract mathematical term, extrema — referring to maximum or minimum values of a function — are the very essence of optimization problems that flight engineers and software architects solve daily to push the boundaries of aerial capabilities.
The Mathematical Foundation of Optimal Flight
At its core, flight technology is an engineering discipline deeply rooted in mathematics. Whether designing aerodynamic structures, programming sophisticated control systems, or developing advanced navigation algorithms, engineers are constantly seeking optimal solutions. This quest for the “best” possible outcome is where the concept of extrema becomes indispensable.
Defining Extrema: Maxima and Minima
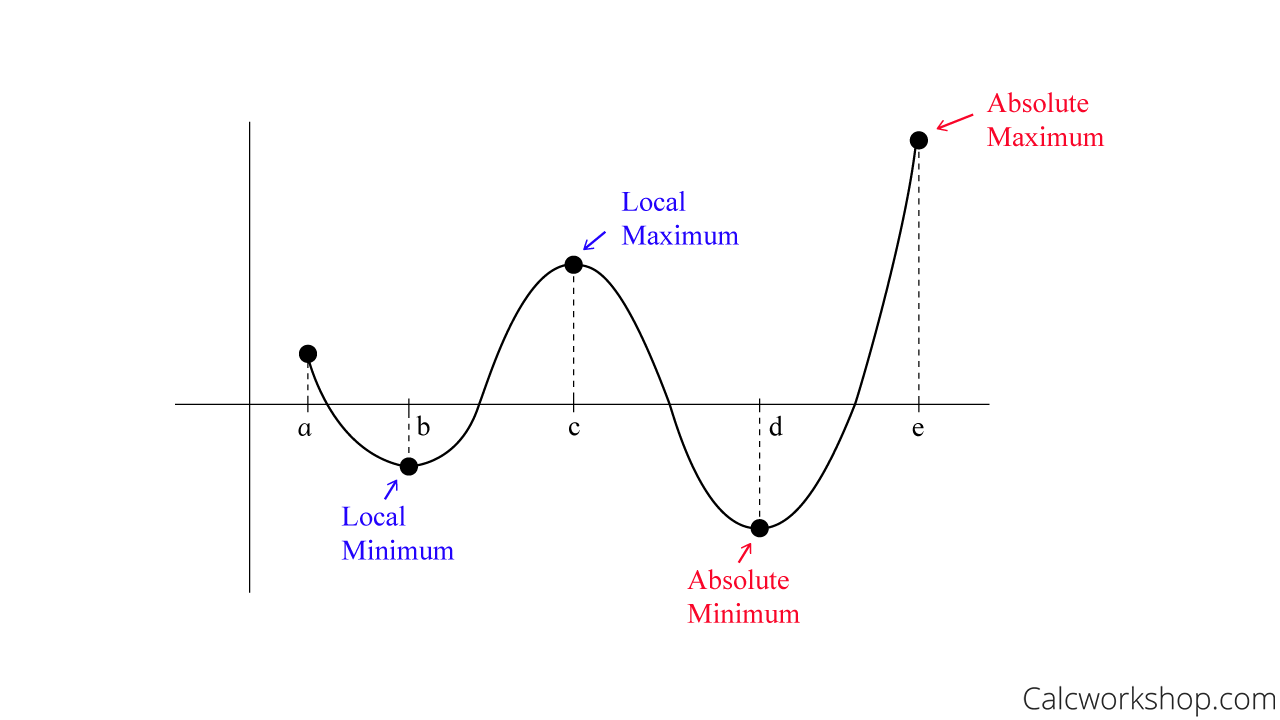
An extrema (plural: extremum) refers to either a maximum or a minimum value of a function within a given domain. Imagine plotting a drone’s altitude over time on a graph. The highest point reached would be a maximum, and the lowest point a minimum. In a more complex scenario, consider the function that describes the drone’s fuel consumption relative to its speed and altitude. An engineer might seek the minimum of this function to identify the most fuel-efficient flight parameters, or perhaps the maximum permissible speed before structural integrity is compromised.
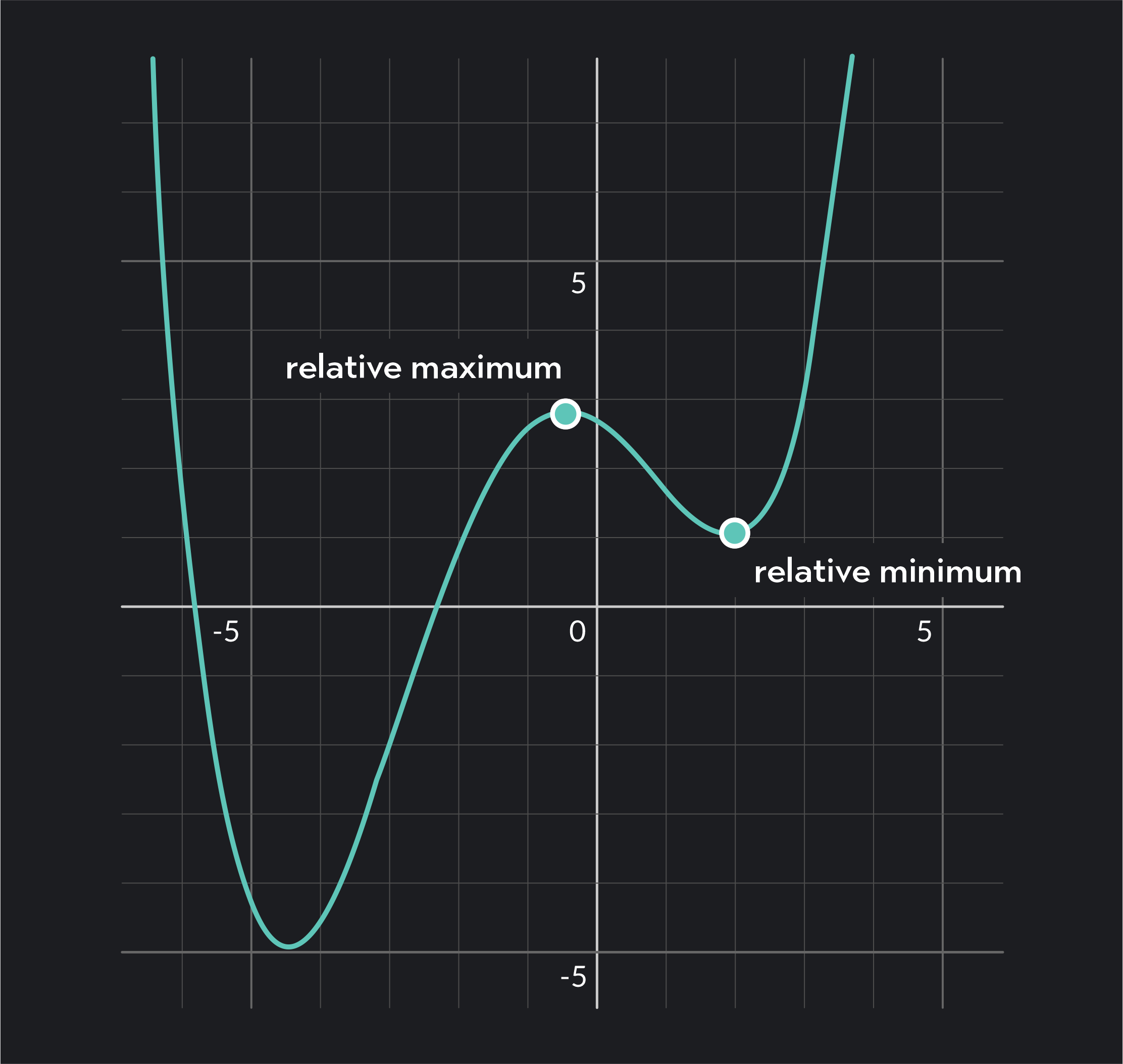
These extrema can be “local” or “global.” A local maximum is the highest point within a specific neighborhood of the function, while a global maximum is the highest point across the entire domain of the function. The same applies to minima. In drone flight, distinguishing between local and global extrema is crucial. For instance, an autonomous system might find a local minimum in a cost function representing collision risk, but a more comprehensive analysis might reveal a safer, globally optimal path. The methods for finding these points, often involving calculus (derivatives) or iterative optimization algorithms, are deeply embedded in the software that governs a drone’s every move.
Functions in Flight: Mapping Drone Performance
To apply the concept of extrema, we must first represent aspects of drone flight as mathematical functions. Almost every measurable parameter or objective in drone technology can be formulated as a function.
- Position and Velocity: The drone’s spatial coordinates and speed over time can be expressed as functions, allowing for the calculation of peak speeds (maxima) or moments of complete stillness (minima).
- Energy Consumption: A function can map factors like motor speed, payload weight, and air resistance to the battery drain. Finding the minimum of this function reveals the most energy-efficient flight profile.
- Signal Strength: For FPV systems or data transmission, the wireless signal strength can be modeled as a function of distance and obstacles. Maximizing this function ensures reliable communication.
- Control Error: The deviation of the drone from its desired state (e.g., maintaining a perfectly level hover) can be quantified as an error function. Minimizing this error is the primary goal of stabilization systems.
By transforming real-world physical and operational aspects into mathematical functions, flight technology engineers gain the ability to analyze, predict, and ultimately optimize drone performance through the identification and manipulation of their extrema.
Extrema in Drone Control and Stabilization
One of the most immediate and critical applications of extrema is within a drone’s control and stabilization systems. A drone is inherently unstable without constant active control. Maintaining a stable flight requires continuous adjustments, which are fundamentally driven by minimizing deviations from desired states.
Maintaining Equilibrium: Minimizing Deviation
For a drone to hover steadily, fly along a straight path, or maintain a specific altitude, its onboard flight controller must continuously monitor its orientation (pitch, roll, yaw), altitude, and position. Any deviation from the target value is considered an “error.” The control system’s primary objective is to minimize this error.
Consider a drone attempting to maintain a perfectly level roll angle. If a gust of wind causes it to tilt, the control system calculates the current roll angle, compares it to the desired 0-degree roll, and identifies the difference as an error. This error represents a “peak” or “trough” in the drone’s deviation function from its desired state. The system then computes corrective motor commands designed to bring this error function back to its minimum — ideally zero. This process happens hundreds, if not thousands, of times per second, effectively creating a continuous loop of error detection and minimization.
PID Controllers and the Pursuit of Stability
Proportional-Integral-Derivative (PID) controllers are ubiquitous in drone flight technology for this very purpose. A PID controller works by calculating an “error” value as the difference between a measured process variable (e.g., current roll angle) and a desired setpoint (e.g., 0 degrees roll).
- Proportional (P) term: Responds to the current error. The larger the error, the stronger the corrective action. This helps to reduce immediate deviations.
- Integral (I) term: Accounts for past errors. It sums up the error over time, helping to eliminate steady-state errors (small, persistent deviations that the P term might not fully correct).
- Derivative (D) term: Predicts future errors based on the current rate of change of the error. It helps to dampen oscillations and prevent overshooting the setpoint, essentially minimizing the rate at which the error function approaches or departs from its extremum.
Tuning PID controllers involves finding the optimal balance of these three terms to minimize the overall error function, ensuring rapid response, minimal overshoot, and stable operation. This tuning process itself is an optimization problem, searching for the extrema (specifically, the minimum) of a performance metric that balances stability, responsiveness, and accuracy.

Navigating the Skies: Path Optimization with Extrema
Beyond mere stability, drones are designed to execute complex missions, often requiring intelligent navigation through dynamic environments. Here, the concept of extrema moves from local stabilization to global path planning and obstacle avoidance.
Efficient Trajectories: Minimizing Time and Energy
Autonomous drones conducting surveys, deliveries, or inspections often need to complete their missions as efficiently as possible. This translates into finding flight paths that minimize travel time, energy consumption, or a combination thereof. Such problems are classic examples of optimization, where the “cost” of a path is represented by a function, and the goal is to find the path that corresponds to the minimum value of this cost function.
Factors influencing this cost function can include:
- Distance: Shorter paths generally consume less energy and time.
- Wind Conditions: Flying against strong headwinds increases energy consumption, so algorithms might seek paths that minimize exposure to adverse winds.
- Altitude Changes: Climbing and descending consume energy, so smooth, optimized vertical profiles are preferred.
- Payload Weight: Heavier payloads require more energy, further emphasizing the need for efficient paths.
Sophisticated navigation algorithms employ techniques like Dijkstra’s algorithm, A* search, or more advanced methods based on calculus of variations to explore potential flight paths and identify the one that yields the global minimum for the defined cost function. The resulting trajectory is an optimal path, an extremum of the mission’s performance criteria.
Obstacle Avoidance: Maximizing Safety Margins
In environments with obstacles, the navigation problem becomes even more critical. Drones must not only find an efficient path but also ensure collision avoidance. This introduces new objectives into the optimization problem: maximizing the distance from obstacles while minimizing path length or energy.
Obstacle avoidance algorithms create “potential fields” or “cost maps” where obstacles are assigned high cost values, and clear spaces have low costs. The drone’s navigation system then seeks a path that traverses areas of minimum cost, effectively finding a trajectory that maximizes the safety margin from potential collisions. This involves continuously evaluating sensor data (Lidar, radar, cameras) to update the cost map in real-time and recalculate the optimal, collision-free path. The “safest” path is thus another form of extremum — a path that corresponds to the maximum clearance from hazards.
Sensor Data and Decision Making: Identifying Critical Points
Drones are equipped with a suite of sensors that collect vast amounts of data about their environment and internal state. Interpreting this data effectively often involves identifying extrema to extract meaningful insights and inform decision-making processes.
Interpreting Environmental Inputs
Sensors like accelerometers, gyroscopes, magnetometers, barometers, GPS, and vision systems generate continuous streams of data. For instance, in remote sensing applications, a drone might be equipped with a thermal camera. Identifying the hottest or coldest points in a surveyed area involves finding the maxima and minima in the thermal data stream. In object detection, algorithms might look for local maxima in image intensity gradients to identify edges or corners of objects, critical for recognition and tracking. Altimeters provide altitude data, and identifying the lowest point reached during a flight, or the highest peak flown over, involves finding extrema in the altitude readings. These critical points directly inform mission objectives, safety protocols, or analytical reports.
Predictive Analysis and Adaptive Flight
The ability to predict future states or identify anomalies is crucial for adaptive flight. By analyzing trends in sensor data, systems can predict potential issues or optimize future actions. For example, monitoring motor temperature data for sudden increases (local maxima) could indicate impending failure, triggering an emergency landing protocol. Conversely, analyzing GPS signal strength for areas of minimal reception can help plan future flights to avoid signal blackouts. In autonomous flight, algorithms might predict the trajectory of a moving target by finding extrema in its observed position and velocity data, allowing the drone to adjust its own path to maintain tracking or interception. This continuous feedback loop, driven by the analysis of extrema in real-time data, enables drones to exhibit intelligent, adaptive behavior.
The Future of Autonomous Flight: Beyond Simple Extrema
As drone technology advances, the application of extrema becomes even more sophisticated. The goal is to move beyond optimizing single parameters to handling complex, multi-objective optimization problems in highly dynamic and unpredictable environments.
Multi-Objective Optimization
Future autonomous drones will need to balance numerous conflicting objectives simultaneously. For instance, a drone might need to maximize data collection quality, minimize flight time, and minimize energy consumption, all while maximizing safety. This is a multi-objective optimization problem, where finding a single “best” extremum is often impossible. Instead, engineers seek a set of “Pareto optimal” solutions—solutions where no objective can be improved without sacrificing another. Advanced algorithms are being developed to navigate this complex landscape of trade-offs, finding the optimal balance of extrema across multiple performance dimensions.
Real-time Adaptive Control
The ability to adapt in real-time to unforeseen circumstances—such as sudden weather changes, unexpected obstacles, or dynamic mission requirements—is the next frontier. This requires control systems that can re-evaluate and re-optimize flight parameters almost instantaneously. This involves continuously calculating and re-calculating extrema for various cost functions, adapting flight paths, and adjusting control inputs in response to new data. Techniques like reinforcement learning, which implicitly search for optimal policies by maximizing reward functions (a form of extremum seeking), are at the forefront of enabling this level of adaptive, intelligent autonomous flight, pushing the boundaries of what drones can achieve in the skies.