Thigmotropism, a term that might sound esoteric at first, is a fundamental biological phenomenon that describes the response of a plant or organism to touch or physical contact. While often discussed in the context of botany, its principles and manifestations have profound implications that resonate even within the realm of advanced technology, particularly in areas like autonomous navigation, sensor integration, and the very design of systems that interact with their environment. Understanding thigmotropism isn’t just about observing how a vine coils around a support; it’s about grasping a core principle of adaptive environmental interaction that informs how we engineer systems to perceive and react to physical stimuli.

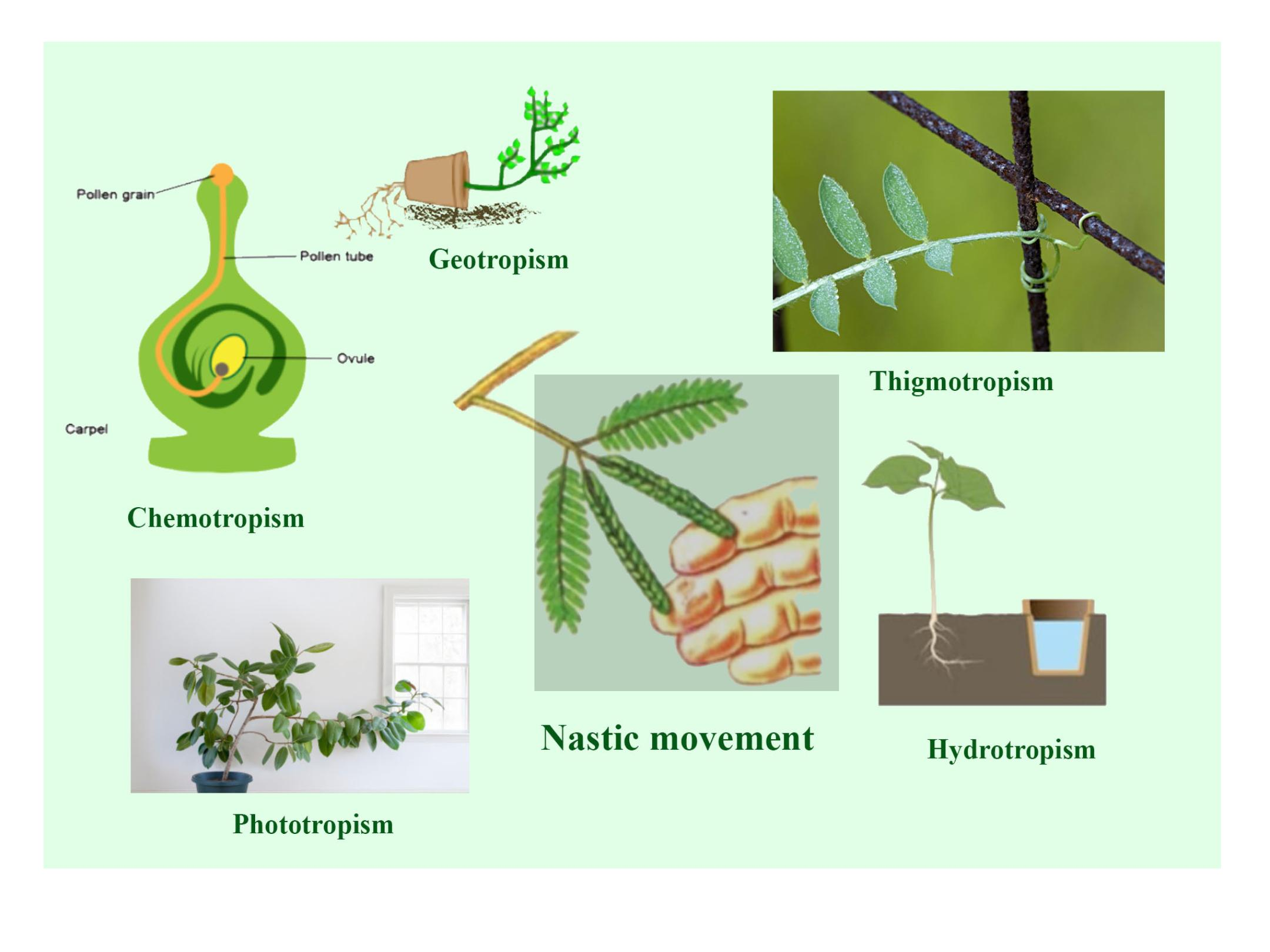
In essence, thigmotropism is a form of tropism, a directional growth or movement of a plant in response to an external stimulus. Unlike phototropism (response to light) or gravitropism (response to gravity), thigmotropism specifically concerns the tactile sense. This responsiveness to touch allows organisms to navigate complex environments, find support, or even defend themselves. For plants, this can mean increased stability through wrapping tendrils, or in some cases, a mechanism for closing around prey, as seen in the Venus flytrap. The underlying biological mechanisms involve specialized touch-sensitive cells and signaling pathways that translate mechanical pressure into biochemical responses, ultimately influencing cellular growth and movement.
The significance of this biological principle extends far beyond the natural world. As we develop increasingly sophisticated autonomous systems, the ability to accurately sense and react to physical contact becomes paramount. This is particularly relevant in the field of drone technology and flight systems, where robust obstacle avoidance, precise maneuvering, and safe interaction with the physical environment are critical. Examining thigmotropism offers a biological blueprint for designing systems that possess a heightened awareness of their physical surroundings, mirroring nature’s elegant solutions for navigating and interacting with the world.
Thigmotropism in Nature: A Biological Foundation
The study of thigmotropism in its natural context provides the essential understanding of the phenomenon. This biological drive is crucial for the survival and propagation of many plant species, dictating their physical interactions with their environment and with other organisms.
Positive and Negative Thigmotropism
Plants exhibit two primary forms of thigmotropism: positive and negative.
Positive Thigmotropism: The Grasping Tendrils
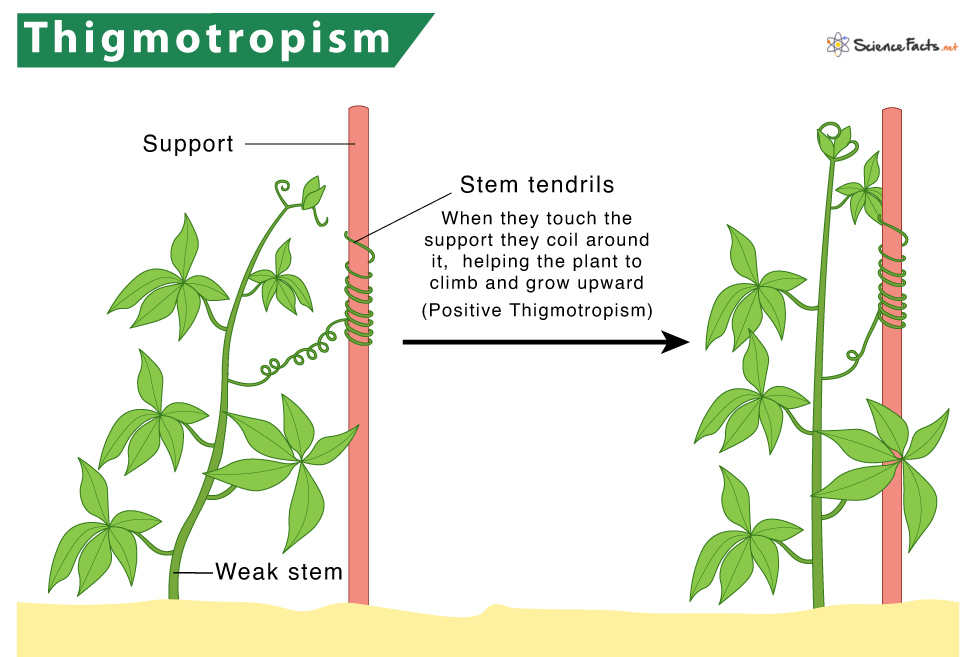
Positive thigmotropism is the tendency for a plant part to grow towards or around a solid object upon contact. The most iconic examples are the tendrils of climbing plants such as peas, cucumbers, and grapes. When a tendril encounters a surface, it initiates a complex series of cellular changes. Initially, the cells on the side of the tendril away from the contact point elongate more rapidly than those on the side in contact. This differential growth causes the tendril to curl and wrap around the supporting structure.
The mechanism involves mechanosensitive ion channels in the cell membranes. When the tendril touches an object, these channels open, allowing ions like calcium to flow into the cell. This influx triggers a cascade of biochemical signals, including changes in hormone levels (particularly auxins) and the activation of genes responsible for cell wall modification and elongation. The precise coordination of these cellular processes allows the tendril to exert enough force to securely anchor the plant, providing access to sunlight and protection from ground-level threats.
Negative Thigmotropism: Avoiding Undesirable Contact
Conversely, negative thigmotropism is the tendency for a plant part to grow away from a solid object. While less commonly discussed than its positive counterpart, it plays a vital role in plant development. For instance, some root systems might exhibit negative thigmotropism when encountering dense soil or obstacles, guiding them to find less resistant paths for growth and nutrient acquisition. In other instances, certain aerial plant parts might recoil from touch, perhaps as a defense mechanism against herbivores or to avoid entanglement that could impede essential functions like photosynthesis.
The Role of Specialized Structures
Thigmotropism is often facilitated by specialized plant structures. Tendrils are the most obvious example, but other adaptations exist. Some plants have sensitive hairs (trichomes) that can trigger a response upon contact. The sensitive plant, Mimosa pudica, is famous for its rapid leaf folding in response to touch, a rapid nastic movement (a non-directional response) that is often discussed alongside thigmotropism due to its tactile nature. This response is mediated by changes in turgor pressure within specialized cells called pulvini, located at the base of the leaves.
Evolutionary Advantages
The evolutionary advantages conferred by thigmotropism are clear. For climbing plants, it’s a critical strategy for achieving height and competing for light in dense environments. For other plants, it can be a means of protection, stability, or even predation. These biological adaptations represent highly efficient, low-energy solutions for interacting with a dynamic physical world.
Thigmotropism in Flight Technology: An Analogous Approach
The principles of thigmotropism, though originating in biology, offer compelling analogies and design inspirations for the development of advanced flight technology, particularly in the context of drones and Unmanned Aerial Vehicles (UAVs). The imperative for UAVs to navigate complex, unpredictable environments without direct human control necessitates sophisticated methods for sensing and responding to physical contact and proximity.
Obstacle Avoidance Systems: The Digital Tendril
Modern drones are equipped with increasingly advanced sensor suites that enable them to detect and avoid obstacles. These systems act as the technological equivalent of a plant’s tendril, allowing the drone to “feel” its environment and adjust its trajectory accordingly.
Sonar and Ultrasonic Sensors
Many drones utilize ultrasonic sensors, which emit sound waves and measure the time it takes for them to return after bouncing off an object. This provides a relatively low-resolution but effective method for detecting nearby solid objects. Similar to how a tendril senses the presence of a surface, these sensors create a “proximity map” around the drone. The drone’s flight controller then processes this information to initiate evasive maneuvers, preventing collisions. This direct, responsive reaction to detected physical boundaries is a clear parallel to positive thigmotropism, where the organism seeks to engage with and navigate around an encountered object.
LiDAR and Infrared Sensors
More advanced systems employ LiDAR (Light Detection and Ranging) or infrared sensors. LiDAR uses laser pulses to create detailed 3D maps of the surroundings, providing much higher precision than ultrasonic sensors. Infrared sensors can detect objects based on their heat signatures or by emitting and detecting infrared light. These technologies allow drones to perceive their environment with greater detail and accuracy, enabling more nuanced reactions to physical stimuli, akin to a plant not just sensing contact but potentially differentiating between textures or surfaces.
Tactile Sensing in Robotic Arms and Landing Gear
Beyond general navigation, specific components of flight technology can benefit from thigmotropic principles. Robotic arms used for manipulation by drones, for example, can employ tactile sensors on their grippers. These sensors allow the arm to detect the texture, shape, and pressure of an object, crucial for delicate tasks like specimen collection or precise placement. The control algorithms for these arms are designed to react to these tactile inputs, mimicking the way a tendril adjusts its grip.
Similarly, landing gear systems are being developed with an increased awareness of the landing surface. Sensors can detect the evenness of the ground, the presence of debris, or the firmness of the terrain. This allows the landing gear to adapt its deployment or cushioning, preventing damage and ensuring a stable touchdown – a direct application of responding to physical contact with the environment.
Biomimicry in Drone Design
The concept of thigmotropism also influences the broader design philosophy of drones. The inherent efficiency and adaptability of biological solutions inspire engineers to create drones that are more resilient and responsive.
Flexible and Compliant Structures
Researchers are exploring the use of flexible and compliant materials in drone construction. These materials can absorb impact, reducing the risk of damage upon accidental contact with obstacles. This is analogous to how plant structures might bend or yield to touch rather than break. The ability of a drone’s frame or rotors to flex upon impact, rather than rigidly resisting, embodies a form of mechanical “give” inspired by biological resilience.
Adaptive Flight Controls
The flight control systems are increasingly designed to be adaptive, learning from interactions with the environment. While not directly a physical touch response, the underlying principle of adjusting behavior based on perceived external conditions shares a conceptual kinship with thigmotropism. If a drone consistently encounters turbulence or unexpected air currents from a particular direction, its control system can adapt its flight parameters, much like a plant might adjust its growth pattern in response to consistent environmental pressures.
The application of thigmotropic principles in flight technology underscores a fundamental engineering goal: creating intelligent systems that can interact safely and effectively with the physical world, drawing valuable lessons from nature’s time-tested strategies.
Thigmotropism and the Future of Autonomous Interaction
The biological phenomenon of thigmotropism offers a rich vein of inspiration for the future of autonomous systems, extending beyond basic navigation and obstacle avoidance. As technology advances, the ability for machines to “feel” and react to physical contact in nuanced ways will unlock new capabilities and redefine human-machine interaction.
Enhanced Perception and Environmental Understanding
Thigmotropism highlights the importance of detailed physical perception. Future autonomous systems will likely incorporate more sophisticated tactile sensing technologies. This could include arrays of micro-sensors capable of discerning surface textures, temperatures, and pressures with a sensitivity approaching biological organisms. Such enhanced perception will allow drones and other autonomous agents to not only avoid hazards but also to actively explore and understand their environment through physical interaction. Imagine a drone mapping an unknown cave system not just with visual or LiDAR data, but also by “touching” its walls to understand their composition and stability.
Dexterous Manipulation and Interaction
The direct analogy between plant tendrils and robotic manipulators is particularly strong. As robotic arms on drones become more dexterous, their ability to interact physically with objects will be enhanced by advanced tactile feedback. This will move beyond simple grasping to tasks requiring delicate manipulation, such as assembling complex structures in remote locations, performing intricate repairs, or even providing care in hazardous environments. The control systems will need to interpret tactile signals in real-time to adjust grip force, orientation, and movement, mirroring the way a plant’s tendril precisely coils.
Human-Machine Collaboration
Thigmotropism also has implications for how humans and autonomous systems will collaborate. As drones and robots become more capable of sensing and reacting to physical contact, they can operate more safely and intuitively alongside humans. For instance, a drone assisting in search and rescue might be programmed to gently nudge debris aside or to recoil from a human rescuer if too close, preventing accidental harm. This subtle responsiveness to physical presence can foster a more seamless and trusting partnership.
Adaptive Material Science and Soft Robotics
The study of thigmotropism also fuels innovation in material science and soft robotics. The development of compliant, self-healing, or shape-changing materials is directly inspired by the responsive and resilient nature of biological tissues. Soft robotic grippers, for example, can conform to irregular shapes and exert gentle pressure, making them ideal for handling delicate objects or for navigating confined spaces. These materials and robotic designs are essentially embodying a form of mechanical thigmotropism, allowing machines to interact with the world in a more organic and less rigid manner.
The Ethical Dimensions of “Touch”
As autonomous systems become more adept at physical interaction, ethical considerations will come to the forefront. Understanding how these systems perceive and respond to contact – how they “feel” the world – will be crucial for ensuring safety, accountability, and responsible deployment. The development of robust safety protocols and clear operational guidelines will be essential as we integrate these “tactile” technologies into more aspects of our lives.
Ultimately, the exploration of thigmotropism serves as a powerful reminder that nature often holds the most elegant and efficient solutions to complex engineering challenges. By studying and adapting these biological principles, we can continue to push the boundaries of what autonomous systems are capable of, creating a future where technology interacts with the physical world in ways that are both intelligent and intuitively responsive.