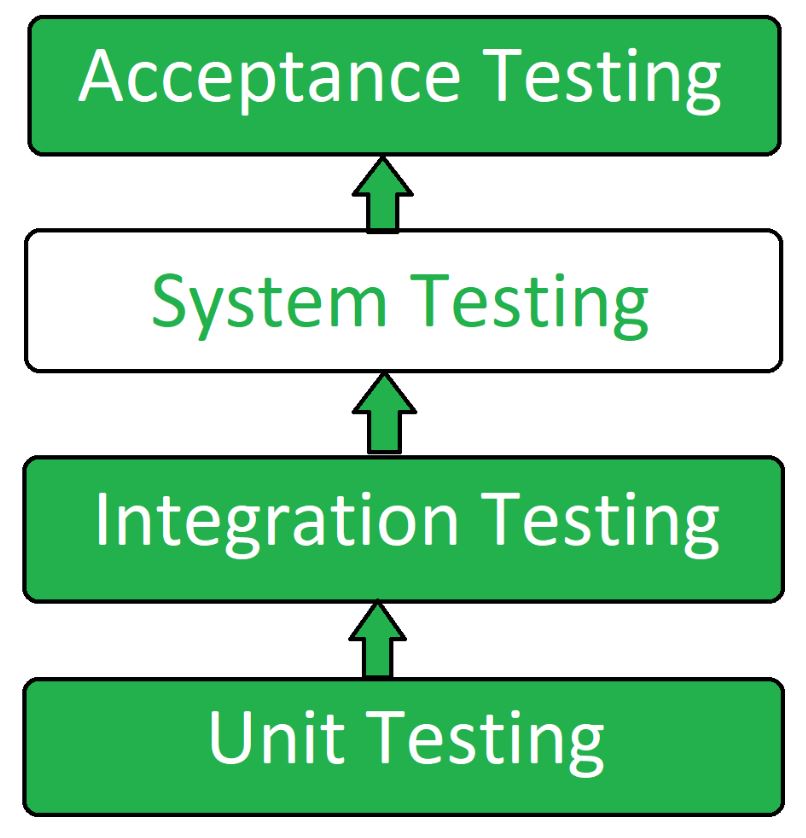
System testing is a critical phase in the software development lifecycle, particularly relevant to the complex ecosystems that power modern drones and flight technology. It moves beyond unit and integration testing to evaluate the complete, integrated system against its specified requirements. In the context of aerial vehicles, this means ensuring that all hardware components, software modules, sensors, and communication protocols work harmoniously to deliver the intended functionality, safety, and performance.
Understanding the Scope of System Testing in Flight Technology
At its core, system testing verifies that the entire system, as a unified entity, meets its functional and non-functional requirements. For drones and their associated flight technology, this encompasses a vast array of interconnected elements. The flight controller, GPS module, inertial measurement unit (IMU), barometers, accelerometers, gyroscopes, and communication systems (radio links, Wi-Fi, Bluetooth) all contribute to the drone’s ability to fly, navigate, and respond to commands. Software layers, including flight control algorithms, navigation logic, obstacle avoidance systems, and user interface applications, are also integral to the system.
System testing aims to uncover defects in the interaction between these components and subsystems. It simulates real-world operating conditions and user scenarios to expose issues that might not be apparent during earlier testing stages. This includes evaluating how the system behaves under stress, in various environmental conditions, and when encountering unexpected events. The goal is to confirm that the system functions as intended from end-to-end, providing a reliable and safe platform for aerial operations.
Functional Verification
This aspect of system testing focuses on validating that the system performs all its intended functions correctly. For flight technology, this would include:
Basic Flight Operations
- Takeoff and Landing: Verifying smooth, controlled ascent and descent, including automatic takeoff and landing sequences.
- Hovering: Ensuring stable hovering at a designated altitude and position, with minimal drift.
- Maneuverability: Testing the system’s ability to execute various flight commands such as forward, backward, left, right, up, and down movements, as well as rotations (yaw, pitch, roll).
- Return-to-Home (RTH): Confirming that the RTH function reliably brings the drone back to its designated home point, considering factors like GPS signal strength and battery level.
Navigation and Waypoint Following
- GPS Accuracy: Evaluating the precision of the GPS module in determining the drone’s position and its ability to maintain a course along a programmed path.
- Waypoint Execution: Testing the drone’s ability to accurately fly between predefined waypoints, maintaining correct altitude, speed, and heading.
- Geofencing: Verifying that the system enforces predefined geographical boundaries, preventing the drone from entering restricted areas.
Sensor Integration and Calibration
- IMU Performance: Ensuring the IMU accurately reports acceleration and rotational rates, crucial for stabilization.
- Barometer Readings: Validating altitude readings from the barometer, especially during ascent and descent.
- Compass Calibration and Performance: Testing the compass’s accuracy and its ability to maintain a heading, even in environments with magnetic interference.
Communication and Control Systems
- Radio Link Stability: Assessing the robustness and range of the radio control link, ensuring uninterrupted command transmission.
- Telemetry Data Transmission: Verifying the reliable flow of telemetry data (battery voltage, GPS coordinates, altitude, etc.) from the drone to the ground station or controller.
- FPV (First Person View) Feed Quality: For systems with FPV capabilities, testing the clarity, latency, and stability of the video feed.
Non-Functional Verification
Beyond just performing functions, system testing also assesses how well the system performs these functions and its overall quality attributes.
Performance Testing
- Flight Endurance: Measuring the actual flight time under various conditions (payload, wind, flight mode) against expected values.
- Speed and Acceleration: Evaluating the maximum achievable speeds and acceleration in different axes.
- Responsiveness: Quantifying the time it takes for the system to respond to pilot commands or changes in environmental conditions.
- Payload Capacity: Testing the drone’s stability and flight characteristics when carrying different payload weights.
Reliability and Stability
- Long-Duration Flights: Conducting extended flight tests to identify any degradation in performance or system failures over time.
- Environmental Resilience: Testing the system’s performance in a range of environmental conditions, including different temperatures, humidity levels, and wind speeds, within the designed operational envelope.
- Stress Testing: Pushing the system to its limits by simulating extreme maneuvers, rapid throttle changes, or near-stall conditions to observe its behavior and recovery mechanisms.
Usability and User Experience
- Controller Interface Intuition: Evaluating the ease of use and clarity of the remote controller’s interface and button layout.
- Companion App Functionality: Testing the usability, responsiveness, and feature completeness of any associated mobile or desktop applications used for mission planning, flight monitoring, and parameter configuration.
- Information Display: Ensuring that critical flight information is presented clearly and legibly to the operator.
Methodologies and Approaches in System Testing
System testing employs a variety of methodologies and approaches tailored to the specific complexities of flight technology systems. These methods are designed to systematically uncover defects and validate the system’s compliance with requirements.
Black-Box Testing
This is a primary approach in system testing where the internal structure or design of the system is not known to the tester. The focus is entirely on the inputs and outputs, verifying that the system behaves as expected based on its specifications. For example, a pilot might issue a command to ascend, and the tester would observe if the drone actually ascends by the specified amount without any other unintended movements. This is crucial for verifying user-facing functionalities and the overall flight experience.
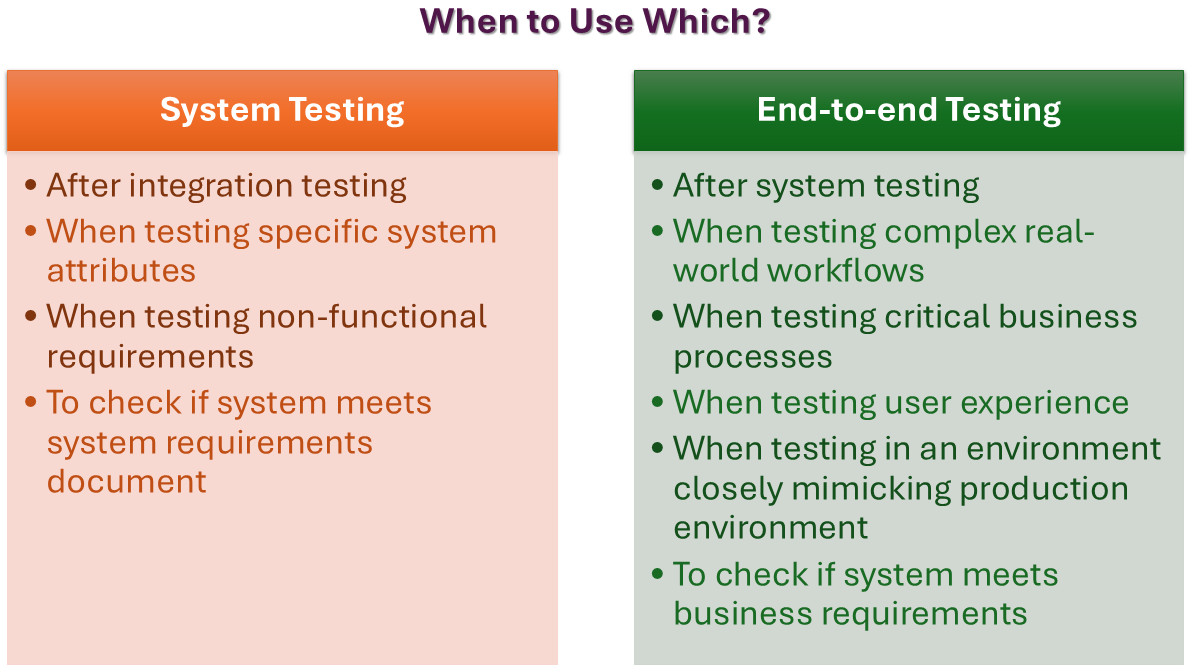
End-to-End Testing
End-to-end testing simulates real-world user scenarios from beginning to end. In the context of drones, this could involve planning a complex aerial survey mission via a ground control station app, executing the mission autonomously, and then analyzing the collected data. It ensures that all integrated components and software layers work together seamlessly throughout the entire operational flow. This includes testing the interaction between the flight controller, GPS, camera, data storage, and the ground station software.
Exploratory Testing
While less structured, exploratory testing is highly valuable. Testers actively explore the system’s functionality and features without predefined test cases, relying on their knowledge, experience, and intuition to discover defects. This can uncover edge cases and unexpected behaviors that might be missed by scripted testing. For example, a tester might intentionally try unusual flight paths or sensor configurations to see how the system reacts.
Regression Testing
After any bug fix or feature enhancement, regression testing is performed to ensure that the changes have not introduced new defects or negatively impacted existing functionality. For a complex system like a drone, this is particularly important. A small software update to the navigation algorithm, for instance, would necessitate regression testing of all basic flight maneuvers, RTH functionality, and waypoint navigation to ensure these core features remain unaffected.
Performance Testing Under Load
This involves testing the system’s behavior under high demand. For flight technology, this could mean testing how the system performs with multiple concurrent tasks running, such as flying a complex mission while streaming high-resolution video and processing obstacle avoidance data simultaneously. It helps identify bottlenecks and assess the system’s ability to handle demanding scenarios.
Automated Testing
Given the repetitive nature of many system tests, automation plays a significant role. Test scripts can be developed to automatically execute a sequence of commands, simulate sensor inputs, and verify the system’s responses. This significantly increases the efficiency and repeatability of testing, especially for regression testing and performance benchmarks. For example, automated tests can repeatedly execute takeoffs and landings to check for consistency.
Key Areas of Focus in System Testing for Flight Technology
The system testing of flight technology requires a deep dive into specific areas to ensure comprehensive validation. These areas are designed to catch a wide spectrum of potential issues before the drone or flight system is deployed.
Safety and Failsafe Mechanisms
Safety is paramount in aerial operations. System testing rigorously evaluates all safety features and failsafe mechanisms.
Failsafe Procedures
- Loss of Control Link: Verifying that the drone correctly executes its predefined failsafe actions (e.g., RTH, land, or hover) when the control link is lost. This includes testing with varying durations of signal loss.
- Low Battery Protection: Ensuring that the system accurately monitors battery levels and initiates appropriate warnings and failsafe actions (e.g., RTH or forced landing) as the battery depletes.
- GPS Signal Loss: Testing the system’s behavior when GPS signals are lost or degraded, ensuring it can maintain stable flight using alternative sensors or execute a safe landing.
- Sensor Failure Detection: Validating that the system can detect critical sensor failures (e.g., IMU, barometer) and respond appropriately, such as alerting the pilot and initiating a safe landing.
Obstacle Avoidance and Collision Prevention
- Sensor Performance: Testing the accuracy and range of obstacle detection sensors (e.g., ultrasonic, vision-based, lidar) under various lighting and environmental conditions.
- Avoidance Maneuvers: Evaluating the effectiveness and responsiveness of the obstacle avoidance system in detecting and maneuvering around detected obstacles without causing flight instability.
- False Positives/Negatives: Identifying scenarios where the system incorrectly identifies an obstacle or fails to detect a real one.
Navigation Accuracy and Precision
Precise navigation is fundamental for autonomous flight, mapping, and aerial surveying.
Geolocation Accuracy
- Positional Drift: Measuring any drift in the drone’s position over time or during prolonged flights, especially in environments with weak GPS signals.
- Waypoint Precision: Quantifying how closely the drone adheres to the programmed path and the accuracy of its arrival at each waypoint.
- Altitude Hold Stability: Evaluating the consistency of altitude hold, especially in windy conditions or when accelerating/decelerating.
Autonomous Flight Modes
- Mission Planning Integration: Testing the seamless integration of mission plans generated by ground control software with the flight controller’s execution.
- Dynamic Re-routing: If supported, testing the system’s ability to dynamically re-route the flight path in response to new information or changing conditions.
Environmental Tolerance and Robustness
Drones often operate in challenging environments, and system testing must account for this.
Extreme Conditions
- Temperature Extremes: Testing the system’s operational limits and performance degradation at high and low temperatures, within the specified operating range.
- Wind Resistance: Evaluating the drone’s ability to maintain stability and control in varying wind speeds and directions.
- Electromagnetic Interference (EMI): Assessing the system’s susceptibility to EMI from external sources and its ability to maintain reliable communication and sensor data.
Vibration and Shock Resistance
- Component Durability: Testing the resilience of critical components to vibrations encountered during flight.
- Landing Impact: Evaluating the system’s ability to withstand minor impacts from less-than-perfect landings.
Data Integrity and Logging
For many applications, accurate data recording and logging are crucial.
Flight Data Logging
- Completeness of Logs: Ensuring that all critical flight parameters are logged accurately and completely, including sensor readings, commands, and system status.
- Log File Integrity: Verifying that log files are not corrupted and can be reliably accessed and analyzed.
- Time Synchronization: Ensuring accurate time stamping of logged data for event correlation.
By focusing on these detailed areas, system testing ensures that complex flight technology systems are not only functional but also safe, reliable, and performant in their intended operational environments. This rigorous validation process is essential for building trust and confidence in aerial systems.