The familiar Cartesian coordinate system, with its perpendicular x and y axes, is the bedrock of much of our mathematical and scientific understanding. However, for certain applications, particularly those involving rotation, circular motion, or navigation around a central point, an alternative system offers a more intuitive and efficient representation: the polar coordinate system. Understanding the polar coordinate system is crucial for anyone delving into advanced flight control, navigation algorithms, or sensor data interpretation within the realm of modern flight technology.
The Fundamentals of Polar Coordinates
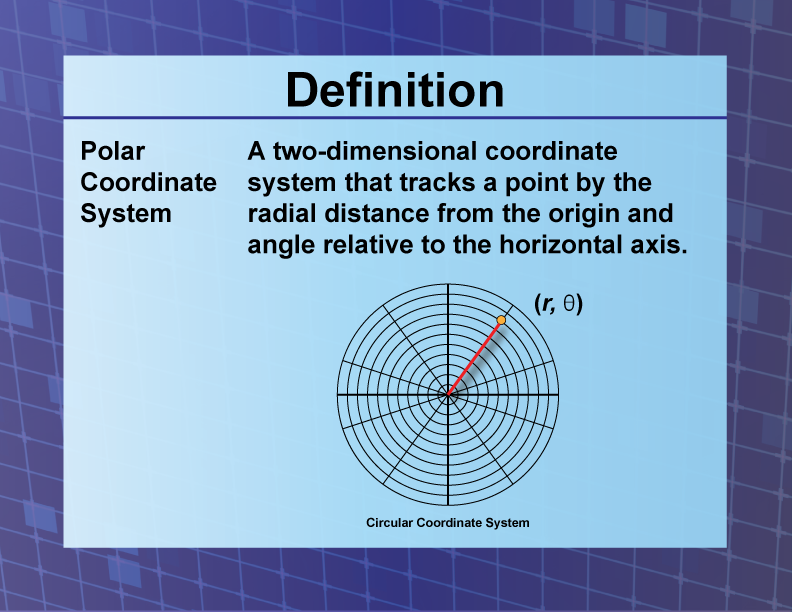
At its core, the polar coordinate system describes the position of a point in a two-dimensional plane using two values: a distance from a central point and an angle relative to a fixed direction.
The Pole and the Polar Axis
The central point in the polar coordinate system is called the pole. This is analogous to the origin (0,0) in the Cartesian system. From the pole emanates a ray, known as the polar axis. Typically, the polar axis is aligned with the positive x-axis of a corresponding Cartesian system, pointing horizontally to the right.
Radial Distance (r)
The first polar coordinate is the radial distance, denoted by the symbol r. This value represents the straight-line distance from the pole to the point in question. In the context of flight technology, r could represent the range to a target, the distance from a waypoint, or the extent of a sensor’s detection radius. For any given point, r is a non-negative value. If r = 0, the point is located at the pole itself, regardless of the angle.
Angular Coordinate ($theta$)
The second polar coordinate is the angular coordinate, denoted by the symbol $theta$. This value represents the angle measured counterclockwise from the polar axis to the line segment connecting the pole to the point. The angle $theta$ can be expressed in degrees or, more commonly in mathematical and engineering contexts, in radians. A full circle represents $2pi$ radians or 360 degrees. Unlike the radial distance, the angular coordinate can be positive or negative, and it can also exceed $2pi$ (or 360 degrees), indicating multiple rotations. This can lead to multiple polar coordinate pairs representing the same geometric point, a concept that requires careful handling in algorithms.
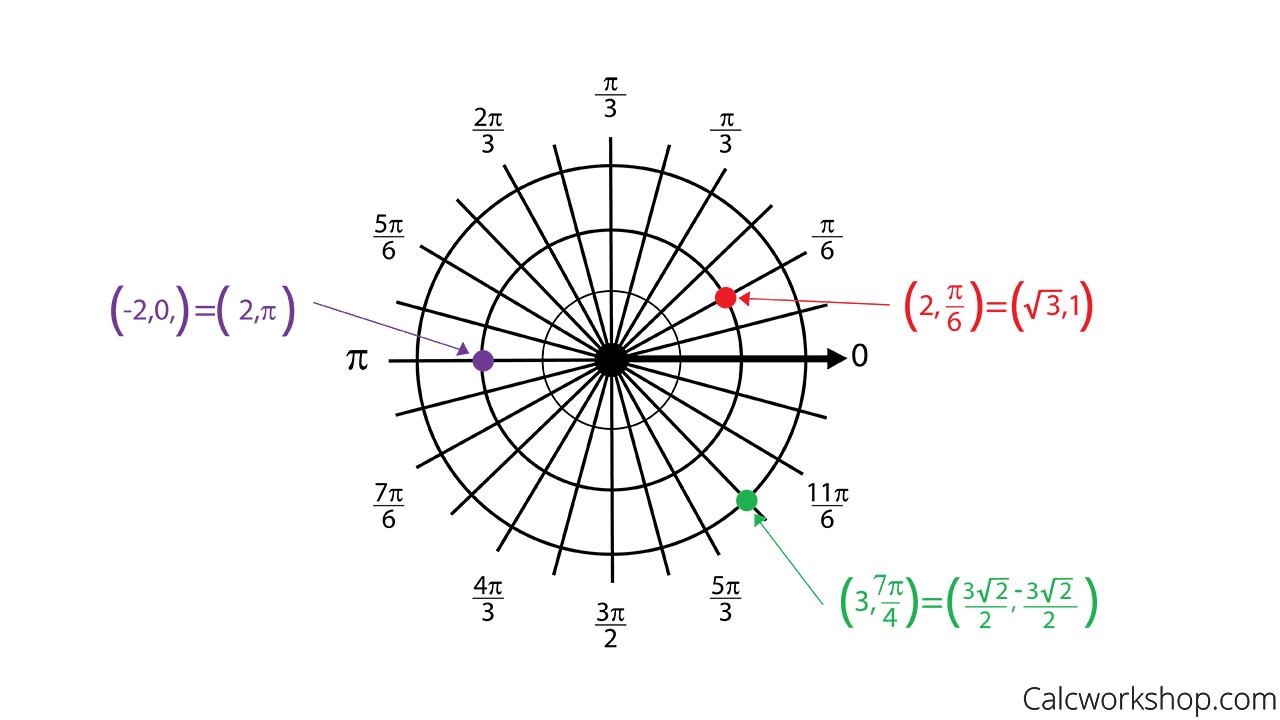
For example, a point located at a radial distance of 5 units and an angle of $pi/4$ radians (45 degrees) would be represented as (5, $pi/4$). A point at the same location could also be represented as (5, $pi/4$ + 2$pi$), (5, $pi/4$ – 2$pi$), and so on. This cyclical nature of angles is a key characteristic of polar coordinates.
Representing Points
A point P in the polar coordinate system is uniquely identified by an ordered pair $(r, theta)$. The interpretation of this pair is: move r units away from the pole along the ray that makes an angle of $theta$ with the polar axis.
Converting Between Coordinate Systems
While the polar system excels at describing circular phenomena, it is often necessary to convert between polar and Cartesian coordinates to leverage the strengths of both systems within complex flight control and navigation algorithms.
Polar to Cartesian Conversion
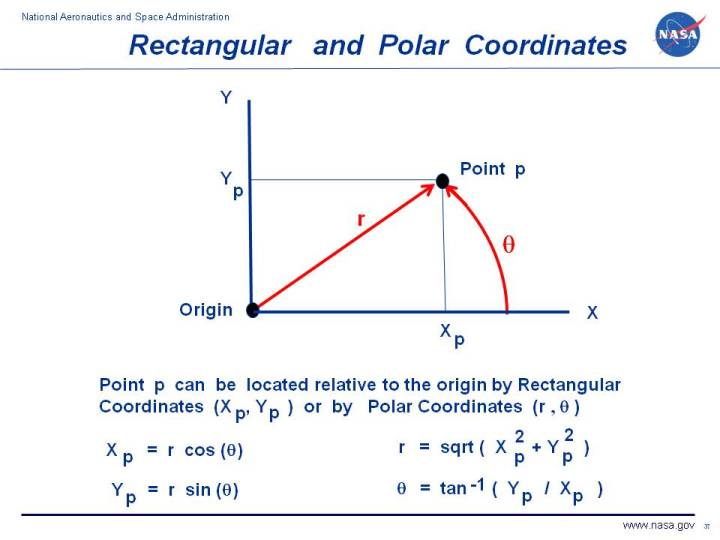
To convert from polar coordinates $(r, theta)$ to Cartesian coordinates $(x, y)$, we use basic trigonometry:
- x = r * cos($theta$)
- y = r * sin($theta$)
Here, x represents the horizontal displacement from the origin, and y represents the vertical displacement. This conversion is fundamental when translating desired polar movements (e.g., “move 10 meters at a bearing of 30 degrees”) into commands for actuators in a flight vehicle, which typically operate based on linear displacements along orthogonal axes.
Cartesian to Polar Conversion
Conversely, to convert from Cartesian coordinates $(x, y)$ to polar coordinates $(r, theta)$, we use the Pythagorean theorem and the arctangent function:
- r = $sqrt{x^2 + y^2}$
- $theta$ = atan2(y, x)
The radial distance r is simply the Euclidean distance from the origin to the point $(x, y)$. The angular coordinate $theta$ is calculated using the atan2(y, x) function, which is a variation of the arctangent function. atan2(y, x) is preferred over the standard atan(y/x) because it correctly determines the quadrant of the angle, returning a value between $-pi$ and $pi$ (or -180 and 180 degrees), thus avoiding ambiguity. This conversion is vital for processing sensor data that might be presented in Cartesian frames and needs to be interpreted in a polar context for navigation or target tracking.
Applications in Flight Technology
The polar coordinate system finds extensive and critical applications in various aspects of flight technology, from basic navigation to complex guidance systems.
Navigation and Waypoint Following
In autonomous flight systems, waypoints are often defined in a polar manner relative to the current position or a reference point. A flight plan might specify a series of waypoints described by their distance and bearing from the current location. For instance, “proceed 50 meters at a heading of 90 degrees” is a direct polar instruction. The flight control system then uses polar-to-Cartesian conversion to calculate the necessary directional commands for the aircraft’s actuators.
Similarly, when a drone needs to navigate around an obstacle or follow a curved path, polar coordinates can simplify the representation of these trajectories. A circular path, for example, is trivially represented in polar coordinates as a constant r value while $theta$ varies linearly.
Sensor Data Interpretation
Many sensors used in flight technology, such as radar, lidar, and sonar, inherently operate on the principle of measuring distance and angle.
-
Radar and Lidar: These systems emit signals and measure the time it takes for them to return after reflecting off an object. This time directly translates to a radial distance (r). The direction from which the signal returns is the angle ($theta$). Therefore, the raw output of these sensors is naturally in polar coordinates, providing a direct spatial map of the environment around the vehicle. This data is fundamental for obstacle detection and avoidance.
-
Sonar: Similar to radar and lidar, sonar systems use sound waves to detect objects. The measured distance to the object and the direction of the sonar beam form polar coordinates.
Processing this raw polar data often involves converting it to Cartesian coordinates to integrate with other navigation systems or to perform geometric calculations for path planning.
Guidance and Control Systems
Target tracking algorithms frequently employ polar coordinates. If a drone is tasked with maintaining a specific distance and relative angle from a moving target, this describes a desired polar relationship. The control system can then calculate the required adjustments to the drone’s position and velocity to maintain this polar lock.
For example, in aerial cinematography, a drone might be programmed to orbit a subject. This orbit is most naturally described by a constant radial distance and a continuously changing angular position, making polar coordinates the ideal framework for defining and executing such flight paths.
Stabilization Systems
While the primary output of stabilization systems is often in terms of angular rates and attitude adjustments (which can be seen as related to Cartesian rotations), understanding the desired position relative to external points or targets can involve polar reasoning. If a stabilization system needs to maintain a drone at a fixed distance from a hovering point, this distance is a radial component.
Advantages and Considerations
The polar coordinate system offers distinct advantages in specific contexts within flight technology, but it also presents unique challenges.
Advantages
- Simplicity for Circular and Rotational Motion: Describing circular paths, orbits, or movements around a central point is significantly more straightforward and computationally efficient using polar coordinates. A circle centered at the pole is simply $r = text{constant}$.
- Intuitive for Sensor Data: Many sensors that interact with the environment directly provide data in polar form (range and bearing), making the initial interpretation seamless.
- Efficient Representation of Certain Trajectories: Spiral paths, arcs, and radial sweeps are elegantly defined using polar equations.
Considerations and Challenges
- Redundancy of Representation: As mentioned, a single point can have multiple polar coordinate representations $(r, theta + 2pi k)$ for any integer k. Algorithms must be designed to handle this potential ambiguity, often by constraining $theta$ to a specific range (e.g., $[0, 2pi)$ or $(-pi, pi]$).
- Singularity at the Pole: When $r = 0$, the angle $theta$ becomes undefined. However, for practical purposes in flight technology, this usually means the vehicle is at the reference point, and the specific angle is irrelevant.
- Conversion Overhead: While conversions are straightforward, they introduce computational overhead. In real-time, high-frequency control loops, the efficiency of these calculations can be a factor.
- Integration with Cartesian Systems: Most physical actuators and control surfaces of an aircraft operate based on linear movements and forces in Cartesian space. Therefore, a robust system must seamlessly integrate polar representations with underlying Cartesian control mechanisms.
In conclusion, the polar coordinate system is an indispensable tool in the arsenal of flight technology. Its ability to intuitively represent circular motion, angular relationships, and direct sensor measurements makes it fundamental for navigation, guidance, control, and environmental perception. Understanding its principles and its relationship with the Cartesian system is essential for designing and implementing advanced autonomous flight capabilities.