In the sophisticated world of drone technology, where innovation drives capabilities from autonomous flight to AI-powered remote sensing, understanding fundamental programming concepts is crucial. At the heart of configuring, controlling, and customizing drone behavior lies the concept of a “parameter” in programming. Far from an abstract term, parameters are the dials, switches, and rule-sets that dictate how a drone’s software functions, how its algorithms adapt, and ultimately, how it performs complex tasks in the real world. They are the essential inputs that allow a generalized piece of code to execute specific actions or produce tailored outputs, making drones adaptable, intelligent, and immensely versatile machines. Without the precise definition and manipulation of parameters, advanced drone functionalities like AI follow mode, intricate mapping missions, or detailed environmental remote sensing would be impossible, locking drones into rigid, unchangeable behaviors.
The Core Concept: Defining and Directing Drone Intelligence
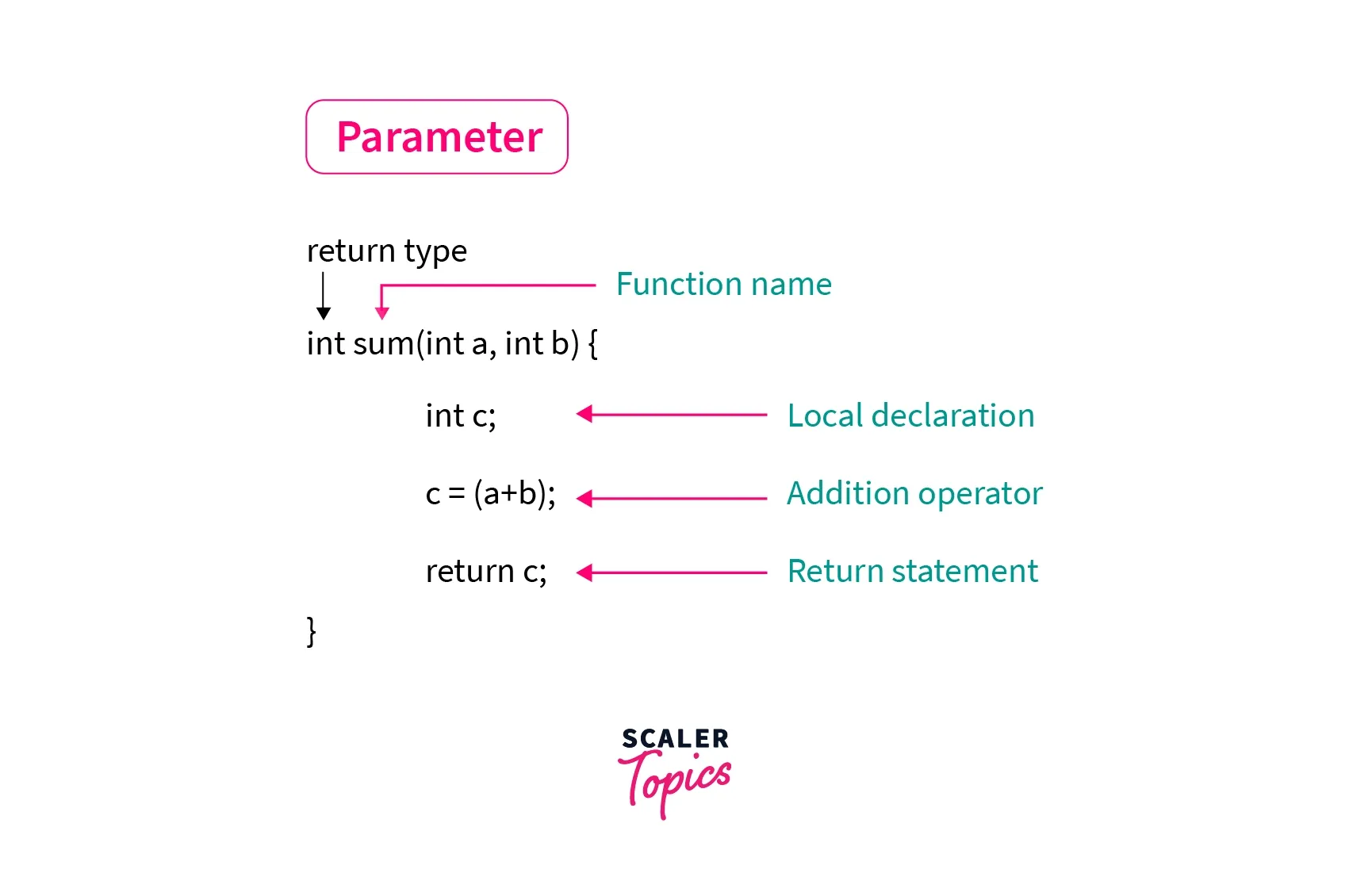
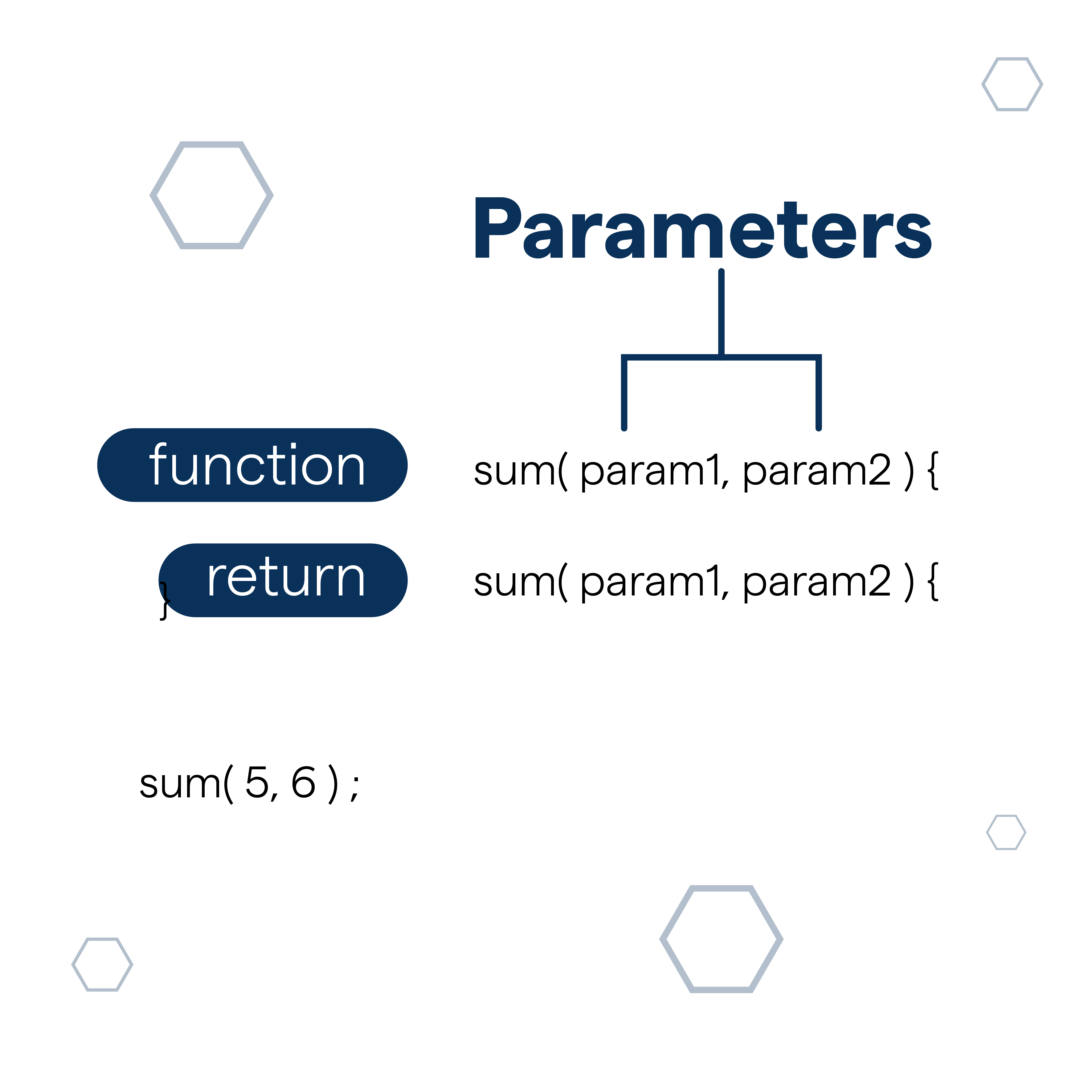
A parameter, at its most basic level, is a special kind of variable used in a function, method, or subroutine to pass information into it. When a developer writes a piece of code designed to perform a specific task—say, calculate a flight path or identify an object—they often don’t know the exact values the code will need to operate on every single time it’s run. Parameters serve as placeholders for these values. When the function is called, specific values, known as “arguments,” are provided for each parameter. This mechanism allows for highly reusable code that can be adapted to various scenarios without needing to be rewritten from scratch.
Consider a drone’s flight control system. A function might be written to calculate_waypoint_trajectory(start_latitude, start_longitude, end_latitude, end_longitude, altitude, speed). Here, start_latitude, start_longitude, end_latitude, end_longitude, altitude, and speed are all parameters. Each time this function is called for a new mission, different arguments (e.g., 40.7128, -74.0060, 34.0522, -118.2437, 100, 15) would be passed, allowing the same underlying code to generate countless unique flight paths. This modularity is foundational to building complex drone systems.
Parameters vs. Arguments
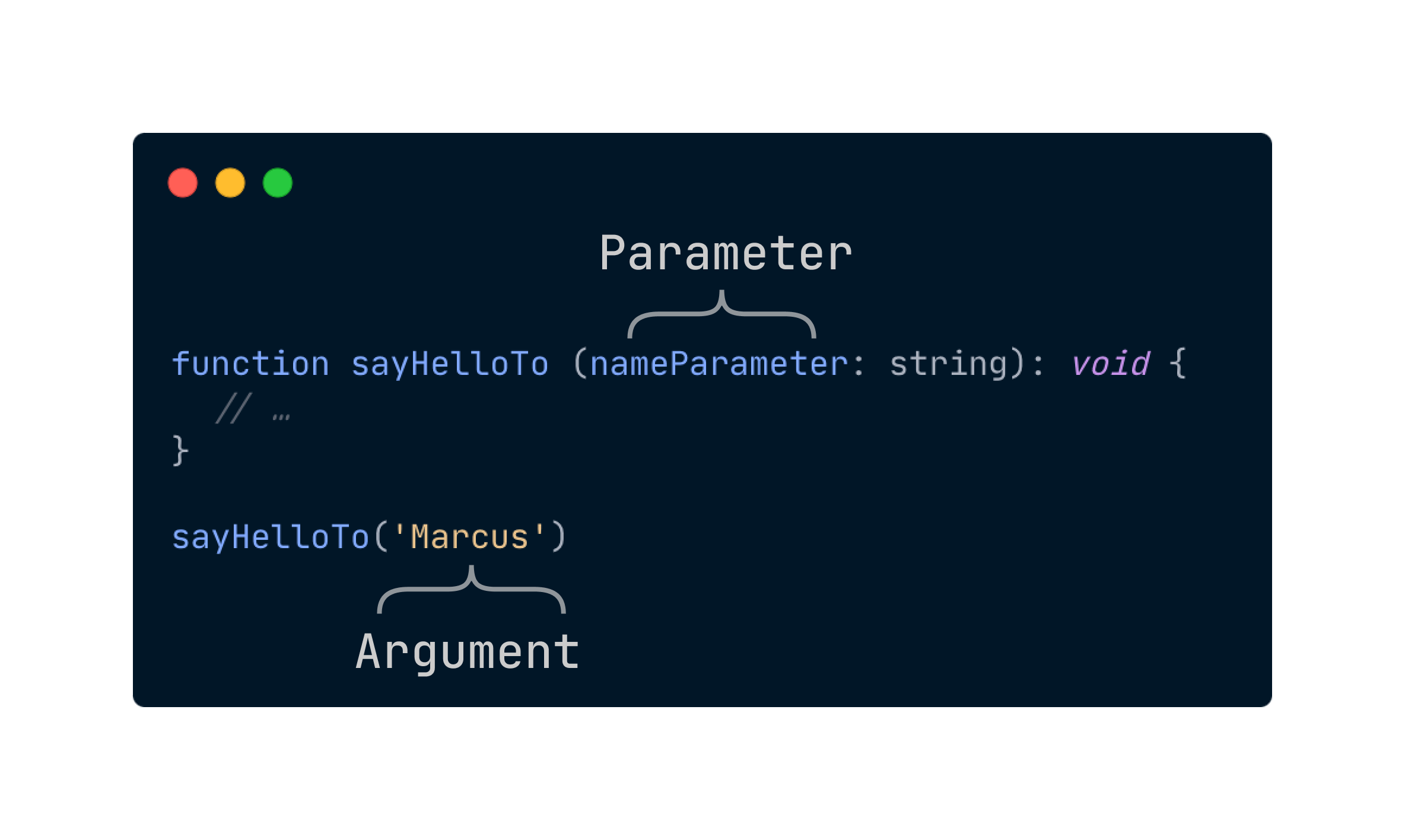
While often used interchangeably in casual conversation, the distinction between parameters and arguments is important for clarity, especially in the context of rigorous drone software development. A parameter is the named variable listed in the function definition (the placeholder). An argument is the actual value passed to the function when it is called (the concrete data).
For example, in a function definition like def set_camera_exposure(iso_value, shutter_speed, aperture):, iso_value, shutter_speed, and aperture are the parameters. When the function is invoked as set_camera_exposure(400, 1/250, 2.8), the values 400, 1/250, and 2.8 are the arguments. This distinction highlights how parameters define the kind of input expected, while arguments provide the specific instances of that input, giving drone operators and autonomous systems the flexibility to fine-tune camera settings on the fly for various lighting conditions in aerial filmmaking or remote sensing missions.
Configuration and Personalization
Beyond direct function inputs, parameters also extend to system-wide configurations that define a drone’s inherent characteristics and operational limits. These might include maximum ascent rate, geofence boundaries, battery warning thresholds, or even the sensitivity of IMU sensors. These configuration parameters are often stored in dedicated files or databases and loaded at system startup, allowing for easy updates and personalization without recompiling the entire drone’s firmware. This approach enables manufacturers to release firmware updates that tweak performance characteristics, or allows expert users to fine-tune their drone for specific tasks, like increasing stability for cinematic shots or boosting agility for racing. The ability to modify these parameters is what gives modern drones their incredible adaptability, allowing a single drone platform to serve vastly different purposes simply by adjusting its programmed behavior.
Parameters in Autonomous Flight and AI Follow Mode
The advanced capabilities of modern drones, particularly in autonomous flight and AI-driven features like follow mode, are heavily reliant on meticulously defined and managed parameters. These parameters govern everything from navigational precision to the responsiveness of intelligent tracking algorithms. Without them, autonomous systems would be rigid, unable to adapt to dynamic environments or user preferences.
Mission Planning and Waypoint Parameters
Autonomous flight missions are essentially sequences of commands and waypoints, each defined by a set of parameters. When planning a mapping mission, for instance, users input parameters such as latitude, longitude, and altitude for each waypoint. But it goes deeper: additional parameters for each waypoint might include desired heading, gimbal pitch, camera trigger events, and even the speed at which the drone should approach or depart that specific point.
For complex surveying tasks, parameters for grid patterns, overlap percentages for image capture, and flight line spacing are critical. These ensure consistent data collection for creating accurate 3D models or orthomosaics. The drone’s flight controller interprets these parameters, translating them into precise motor commands and navigation instructions, effectively executing a predefined script of aerial movements. The flexibility afforded by these parameters allows operators to design highly specialized missions, optimizing data collection for various applications, from agricultural analysis to infrastructure inspection, all with minimal direct pilot intervention during execution.
AI Behavior Tuning
AI Follow Mode is a prime example of parameter-driven intelligence. When a drone tracks a moving subject, its AI algorithms are constantly processing visual data to identify, track, and predict the subject’s movement. The responsiveness and accuracy of this tracking are directly influenced by a range of parameters. These might include the sensitivity of object detection thresholds, the prediction horizon for the subject’s future position, smoothing factors for flight path adjustments, and even dynamic parameters that adjust the following distance based on the subject’s speed or terrain.
For example, a tracking_sensitivity parameter might determine how quickly the drone reacts to slight movements of the subject, while a max_follow_distance parameter would set the upper limit for how far the drone can trail. Developers continuously refine these parameters during the AI’s training and deployment phases to optimize performance across diverse scenarios, ensuring the drone can seamlessly follow a mountain biker on a winding trail or a boat across open water. This fine-tuning through parameters makes AI systems robust and adaptable rather than brittle and easily confused.
Dynamic Obstacle Avoidance Settings
Autonomous navigation in complex environments often requires sophisticated obstacle avoidance. This system, too, is heavily parameterized. Parameters define the drone’s “safety bubble”—the minimum distance it must maintain from detected obstacles. They also dictate how the drone reacts to an impending collision: should it stop, ascend, descend, or circumnavigate?
Key parameters in obstacle avoidance include:
detection_range: The maximum distance at which sensors (e.g., LiDAR, ultrasonic, vision) can reliably detect obstacles.avoidance_strategy: An enumerated parameter specifying the drone’s response (e.g.,hover,divert_left,divert_right,ascend).reaction_time: How quickly the drone initiates an avoidance maneuver once an obstacle is detected within the warning zone.safe_altitude_buffer: The minimum vertical clearance required when flying over or under obstacles.
These parameters allow manufacturers to tailor avoidance systems to different drone models and intended uses. A professional inspection drone might prioritize cautious hovering, while an agile delivery drone might opt for swift, calculated diversions. Dynamic adjustment of these parameters based on flight mode or environmental conditions (e.g., more cautious in urban areas, less so over open fields) further enhances safety and mission success.
Parameters for Mapping and Remote Sensing
Mapping and remote sensing applications are among the most demanding for drone software, requiring precise control over data acquisition, processing, and interpretation. Parameters are the bedrock upon which these intricate processes are built, enabling high-fidelity data collection and actionable insights.
Data Acquisition and Sensor Calibration
For accurate mapping and remote sensing, the drone’s sensors must be precisely calibrated and configured. Parameters define critical aspects of data acquisition:
- Camera Settings: Parameters like
ISO,shutter_speed,aperture,white_balance, andfocus_modeare crucial for capturing high-quality images under varying light conditions. For thermal imaging, parameters foremissivityandtemperature_rangeare vital. - GPS/RTK Data Logging: Parameters specify the frequency of GPS data logging, the minimum number of satellites required for a fix, and the precision levels for RTK (Real-Time Kinematic) or PPK (Post-Processed Kinematic) corrections.
- LiDAR Scan Patterns: For LiDAR sensors, parameters dictate scan density, scan speed, and vertical/horizontal field of view, directly impacting the resolution and coverage of the generated point cloud.
- Multispectral/Hyperspectral Bands: For agricultural or environmental analysis, parameters specify which specific spectral bands to activate and capture, allowing researchers to target particular plant health indicators or material compositions.
These parameters ensure that the raw data collected is of the highest possible quality and suitable for subsequent analytical processing, minimizing errors and maximizing the utility of the remote sensing mission.
Image Processing and Algorithmic Control
Once data is acquired, parameters continue to play a crucial role in its processing. Photogrammetry software, used to stitch together thousands of drone images into 3D models or orthomosaics, relies heavily on user-defined parameters. These include:
- Image Overlap Percentage: Defines the required forward and side overlap between consecutive images for robust reconstruction.
- Keypoint Detection Thresholds: Parameters controlling the sensitivity of algorithms that identify unique features in images, crucial for aligning them accurately.
- Geometric Correction Factors: Parameters applied to correct lens distortions or atmospheric aberrations.
- Output Resolution: Specifies the ground sample distance (GSD) of the final map product, directly impacting the level of detail.
In AI-driven object recognition for remote sensing (e.g., counting trees, identifying disease outbreaks, or detecting illegal structures), machine learning models are configured with parameters that define their confidence thresholds for detection, the size and shape of objects to look for, and the sensitivity to false positives. Modifying these parameters allows analysts to fine-tune the detection process for specific scenarios and improve the accuracy of automated surveys.
Environmental Adaptation and Scene Analysis
Drones operating in diverse environments for remote sensing must adapt to changing conditions. Parameters facilitate this adaptation:
- Wind Compensation: Flight control parameters can be adjusted to account for strong winds, maintaining stability and image quality.
- Altitude Adjustment: For terrain-following missions, parameters define the drone’s desired ground clearance, allowing it to maintain a consistent height above varying topography, critical for uniform data capture.
- Atmospheric Correction Models: For scientific remote sensing, parameters can define specific atmospheric models to apply, correcting for haze or cloud cover that might obscure ground features.
- Dynamic Lighting Adjustments: Some advanced systems use parameters to dynamically adjust camera settings based on real-time light meter readings, ensuring consistent exposure across an entire flight path, even when flying from bright sunlight into shadow.
These environmental adaptation parameters enable drones to operate reliably and capture consistent data in challenging conditions, expanding the scope and utility of remote sensing missions across various industries.
Enhancing Drone Performance and Adaptability
The pervasive use of parameters is not just about initial setup; it’s fundamental to the ongoing evolution, performance tuning, and user interaction with drone technology. They provide the mechanism for manufacturers to push new features, for users to customize their experience, and for developers to continually innovate.
Software Updates and Over-the-Air Configuration
Modern drones receive frequent software updates (firmware updates) that introduce new features, improve performance, or fix bugs. Often, these updates primarily involve changing or introducing new parameters. For instance, an update might include new AI models with refined object_recognition_thresholds or path_planning_algorithms for autonomous flight.
Crucially, many parameters can be updated over-the-air (OTA) without requiring a full firmware flash. This allows drone manufacturers to push quick configuration changes or implement A/B testing for new features on a subset of drones. For professional users, this means mission-specific parameters or application-specific configurations can be downloaded and applied to their fleet rapidly, ensuring their drones are always optimized for the task at hand and benefiting from the latest research and development in drone technology and AI.
User Customization and Developer Flexibility
The parameterization of drone software empowers both end-users and developers. For users, it translates into a highly customizable experience. Flight modes can be tailored, control sensitivities adjusted, and safety features configured to match individual preferences or mission requirements. This level of control is essential for professional pilots who need to precisely tune their aircraft for specific aerial cinematography shots or complex industrial inspections.
For developers, parameters provide immense flexibility. They can write generic algorithms and then use parameters to adapt them to different drone platforms, sensor payloads, or operational environments. This abstraction significantly speeds up the development cycle for new drone applications and allows for rapid prototyping and iteration. A single autonomous navigation algorithm, for example, can be adapted to a heavy-lift cargo drone or a nimble FPV racing drone simply by adjusting parameters like max_acceleration, turn_radius, and payload_mass_compensation.
Future of Parameter-Driven Drone Evolution
As drones continue to evolve, becoming more autonomous and intelligent, the role of parameters will only grow. Future advancements in AI, machine learning, and swarm robotics will rely on ever more sophisticated parameter management. Dynamic parameters, which automatically adjust based on real-time environmental data or mission progress, will become standard. AI models will learn to optimize their own parameters through reinforcement learning, allowing drones to adapt and improve their performance in entirely new and unforeseen situations.
The concept of a parameter, seemingly simple, is the invisible hand guiding the complex behaviors of our most advanced drones. It is the language through which we instruct these sophisticated machines to navigate, perceive, learn, and act, unlocking an ever-expanding array of possibilities in tech and innovation, from autonomous delivery networks to ubiquitous remote sensing platforms for planetary health monitoring.