In the dynamic realm of Tech & Innovation, particularly concerning advanced drone capabilities, understanding fundamental programming constructs is paramount. At the heart of nearly every sophisticated algorithm, from autonomous flight path planning to real-time AI object detection, lies the concept of a “loop.” A loop in programming is a control flow statement that allows code to be executed repeatedly based on a condition or a predefined number of times. It is the very essence of automation, enabling drones to perform complex, repetitive tasks without constant human intervention, thereby defining the frontier of their operational intelligence.

The Core Concept: Automation Through Repetition
Imagine a drone tasked with mapping a large agricultural field. Instead of writing individual commands for each grid segment or data point, a programmer uses a loop. This single programming construct instructs the drone’s onboard computer to repeat a specific set of actions – fly to a coordinate, capture an image, move to the next coordinate – until the entire field has been covered. Without loops, the complexity and sheer volume of code required for even basic autonomous functions would be astronomical, rendering advanced features like AI follow mode or sophisticated remote sensing impractical, if not impossible.
Loops provide an elegant solution for repetitive execution, embodying the efficiency and scalability demanded by modern drone technology. They enable algorithms to process vast streams of sensor data, execute precise flight maneuvers, and adapt to changing environmental conditions by continually re-evaluating parameters. This fundamental ability to repeat operations lies at the foundation of robust, intelligent, and autonomous systems.
Why Loops are Indispensable in Drone Tech
The operational demands of drones necessitate constant, iterative processing. Consider the continuous stream of data from a drone’s GPS, IMU (Inertial Measurement Unit), altimeter, and various environmental sensors. An autopilot system must continuously ingest, process, and act upon this telemetry to maintain stable flight, execute navigation commands, and avoid obstacles. This is where loops shine.
- Real-time Control: Loops ensure that flight control algorithms are executed hundreds, if not thousands, of times per second, guaranteeing the responsiveness required for stable flight and precise maneuverability.
- Data Acquisition and Processing: Whether it’s scanning lidar data for obstacle avoidance or processing high-resolution imagery for mapping, loops facilitate the iterative collection and analysis of vast datasets.
- Autonomous Decision-Making: AI algorithms, particularly those involved in autonomous flight and object recognition, rely on loops to cycle through learning iterations, compare predicted outcomes with actual sensor inputs, and refine their decision-making models.
- System Monitoring: Loops are constantly checking battery levels, motor temperatures, signal strength, and other critical system parameters, triggering alerts or initiating safety protocols when thresholds are breached.
In essence, loops transform static code into dynamic, reactive systems, allowing drones to perceive, process, and respond to their environment with unprecedented sophistication.
Types of Loops and Their Applications in Flight
Different types of loops serve distinct purposes, each suited to specific challenges within drone programming. Understanding their nuances is crucial for developing efficient and reliable drone software. The three most common types are ‘for’ loops, ‘while’ loops, and ‘do-while’ loops.
The ‘For’ Loop: Iterating Through Structured Tasks
A ‘for’ loop is ideal when the number of iterations is known in advance or when iterating over a collection of items. It executes a block of code a specific number of times, making it perfect for structured, sequential tasks.
Syntax (Conceptual):
for (initialization; condition; increment/decrement) {
// code to be executed
}
Drone Applications:
- Waypoint Navigation: A drone’s flight controller might use a ‘for’ loop to systematically navigate through a predetermined list of GPS waypoints.
for (each waypoint in flight_plan) {
navigate_to(waypoint.latitude, waypoint.longitude, waypoint.altitude);
check_arrival_status();
if (waypoint.has_action) {
execute_waypoint_action(waypoint.action_type); // e.g., capture photo, loiter
}
}
- Sensor Data Array Processing: When processing a burst of data from a sensor array (e.g., an array of proximity sensors for local obstacle detection), a ‘for’ loop can efficiently iterate through each sensor’s reading.
for (int i = 0; i < NUM_PROXIMITY_SENSORS; i++) {
distance = read_sensor(proximity_sensors[i]);
if (distance < OBSTACLE_THRESHOLD) {
initiate_avoidance_maneuver();
break; // Exit loop if obstacle found
}
}
- Image Processing Batches: In remote sensing, a drone might capture a series of images that need pre-processing. A ‘for’ loop can iterate through each image file, applying filters or preparing them for stitching.
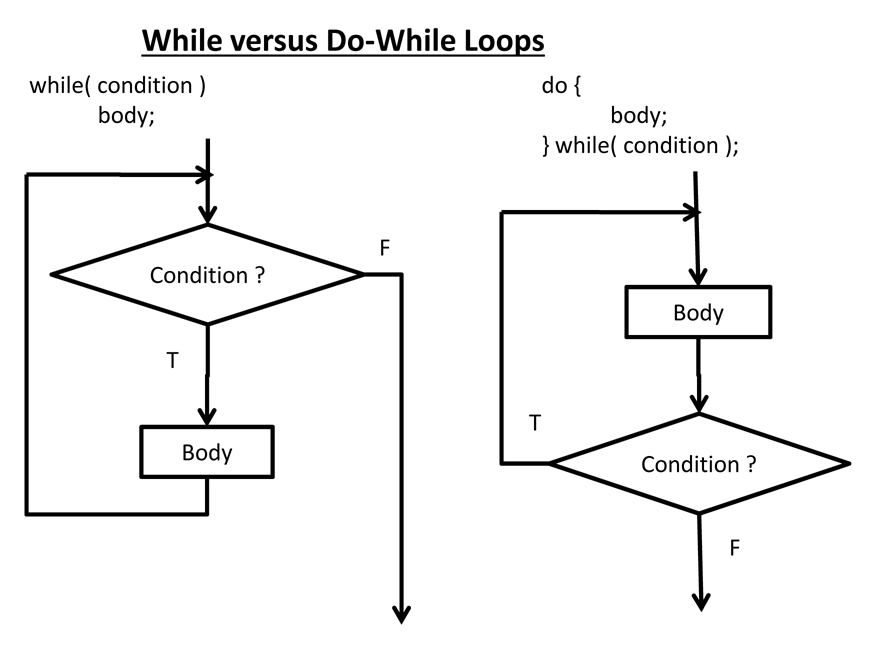
The ‘While’ Loop: Conditional and Continuous Operations
A ‘while’ loop executes a block of code as long as a specified condition remains true. It’s best suited for scenarios where the number of iterations is unknown and depends on runtime conditions.
Syntax (Conceptual):
while (condition_is_true) {
// code to be executed
}
Drone Applications:
- Maintaining Altitude/Position: A drone might continuously adjust its thrust and attitude ‘while’ its current altitude is not equal to its target altitude, or ‘while’ it’s within a specific geofence.
while (drone_is_airborne && battery_level > CRITICAL_THRESHOLD) {
read_imu_data();
calculate_attitude_error(target_pitch, target_roll);
adjust_motor_speeds();
monitor_environment_for_obstacles();
if (collision_imminent) {
initiate_emergency_landing();
break; // Exit loop
}
}
- Obstacle Avoidance: A ‘while’ loop can constantly check sensor data for obstacles.
while (obstacle_not_detected) {
perform_routine_scan();
check_lidar_readings();
check_ultrasonic_data();
}
// Once obstacle_detected becomes true, loop terminates and avoidance strategy begins
- Loiter Mode: A drone could loiter (hover in place) ‘while’ awaiting new commands from the ground station or ‘while’ a specific event occurs (e.g., target acquisition for AI follow mode).
The ‘Do-While’ Loop: Ensuring Initial Execution
The ‘do-while’ loop is similar to the ‘while’ loop, but it guarantees that the code block is executed at least once before the condition is evaluated.
Syntax (Conceptual):
do {
// code to be executed
} while (condition_is_true);
Drone Applications:
- System Initialization Checks: When a drone powers on, it might need to perform a series of self-checks (IMU calibration, GPS lock, battery health) at least once before determining if it’s ready for flight.
do {
perform_preflight_check();
get_gps_lock_status();
check_imu_calibration();
log_system_status();
if (!is_system_ready) {
delay_and_retry(); // Wait a moment and try again
}
} while (!is_system_ready && retries_left > 0);
- Data Logging Initiation: A data logger might initiate a log file and write initial headers before continuously logging data based on a condition.
- Communication Handshake: Establishing communication with a ground station or a payload could use a do-while loop to attempt a connection at least once before entering a continuous monitoring state, or retrying if initial connection fails.
Loops in Advanced Drone Innovation
The utility of loops extends far beyond basic control, forming the bedrock of cutting-edge drone innovation, from advanced AI to sophisticated mapping algorithms.
Autonomous Navigation and Path Planning
Autonomous drones rely heavily on loops for their complex navigation capabilities. A drone following a dynamically generated optimal path uses loops to continuously update its position, compare it to the planned trajectory, and issue correctional commands. For AI-powered obstacle avoidance, a loop constantly processes sensor inputs (lidar, radar, vision cameras), constructing a real-time 3D model of the environment. Within this loop, path planning algorithms might iteratively search for the safest immediate trajectory, avoiding detected obstacles without deviating too far from the overall mission goal. This iterative approach allows for flexible, adaptive navigation in unpredictable environments.
Furthermore, in swarm robotics or multi-drone operations, loops enable each drone to communicate, share data, and adjust its behavior in real-time, coordinating complex tasks such as synchronized aerial displays or large-scale surveillance missions. Each drone’s firmware runs a main control loop that incorporates inputs from its peers, informing its own path decisions.
Real-time Data Processing for AI and Computer Vision
The capabilities of AI follow mode, autonomous inspection, and intelligent object recognition are built upon rapid, iterative data processing. Consider a drone using computer vision to track a moving target. A core processing loop continuously:
- Captures new video frames.
- Applies image processing algorithms to detect and identify the target.
- Calculates the target’s position and velocity relative to the drone.
- Updates the drone’s flight controls to maintain tracking.
This loop executes many times per second, allowing the drone to react fluidly to the target’s movements. Similarly, for autonomous inspection of infrastructure, AI models running within loops can analyze images for cracks, corrosion, or anomalies, providing instant feedback and pinpointing areas of concern without manual review. Machine learning algorithms, which underpin much of AI, are inherently iterative; training models involves loops that cycle through datasets, adjust parameters, and evaluate performance until an optimal solution is reached. These trained models are then deployed on drones, operating within real-time inference loops.
Optimizing Remote Sensing and Mapping Workflows
Remote sensing and 3D mapping involve collecting vast amounts of geospatial data. Loops are critical for managing these immense datasets efficiently. For instance, when a drone captures thousands of overlapping images for photogrammetry, a post-processing workflow might use loops to:
- Iterate through each image file.
- Extract metadata (GPS coordinates, camera orientation).
- Perform initial geometric corrections.
- Feed the processed images into stitching software.
In mapping missions, loops can automate the process of generating orthomosaics or 3D models. A drone’s mission planning software could generate a grid of flight paths, and a ‘for’ loop ensures that each segment of the grid is covered, triggering data capture at precise intervals. For environmental monitoring, a drone might fly a transect, collecting multispectral data. A loop ensures that the sensor is activated and data is logged at predefined spatial intervals, building a comprehensive dataset for analysis of crop health, forest density, or water quality.

The Future: Smarter Loops for Smarter Drones
As drone technology continues to evolve, the complexity and sophistication of the loops embedded in their software will only increase. Future innovations will see loops that are more adaptive, more predictive, and more efficient. Imagine self-optimizing loops that dynamically adjust their iteration frequency based on processing load or environmental conditions, ensuring maximum performance under varying circumstances. AI-powered meta-loops could even learn to rewrite or optimize other loops within the drone’s operational firmware, pushing the boundaries of autonomous intelligence.
The integration of quantum computing principles or neuromorphic computing into drone AI might lead to entirely new paradigms for iterative processing, allowing for instantaneous decision-making and unprecedented levels of autonomy. From ensuring a drone maintains a stable hover to enabling complex multi-agent cooperation and advanced real-time environmental analysis, loops remain an indispensable, foundational element powering the next generation of intelligent flight technology and innovation.