The relentless march of technological progress in the drone industry continues to redefine what is possible in aerial operations. From sophisticated sensor arrays to advanced stabilization systems, every component plays a role in enhancing performance. However, beneath the visible hardware and flight dynamics lies a realm of computational intelligence, where complex algorithms dictate efficiency and capability. One such fundamental concept, borrowed from the field of graph theory, is the Hamiltonian path. Understanding this concept is crucial for grasping how autonomous drones navigate, map, and execute intricate missions with unparalleled precision, driving innovation in areas like AI-driven flight and remote sensing.

The Core Concept in Graph Theory
At its heart, a Hamiltonian path is a concept derived from graph theory, a branch of mathematics concerned with the study of graphs – mathematical structures used to model pairwise relations between objects. A graph typically consists of a set of “vertices” (or nodes) and a set of “edges” (or links) that connect pairs of vertices.
Paths, Cycles, and Vertices
Imagine a network of locations, perhaps a series of landmarks a drone needs to visit, or critical inspection points on a large structure. Each location can be represented as a vertex, and a possible flight segment between two locations can be represented as an edge. A “path” in this context is a sequence of distinct vertices connected by edges.
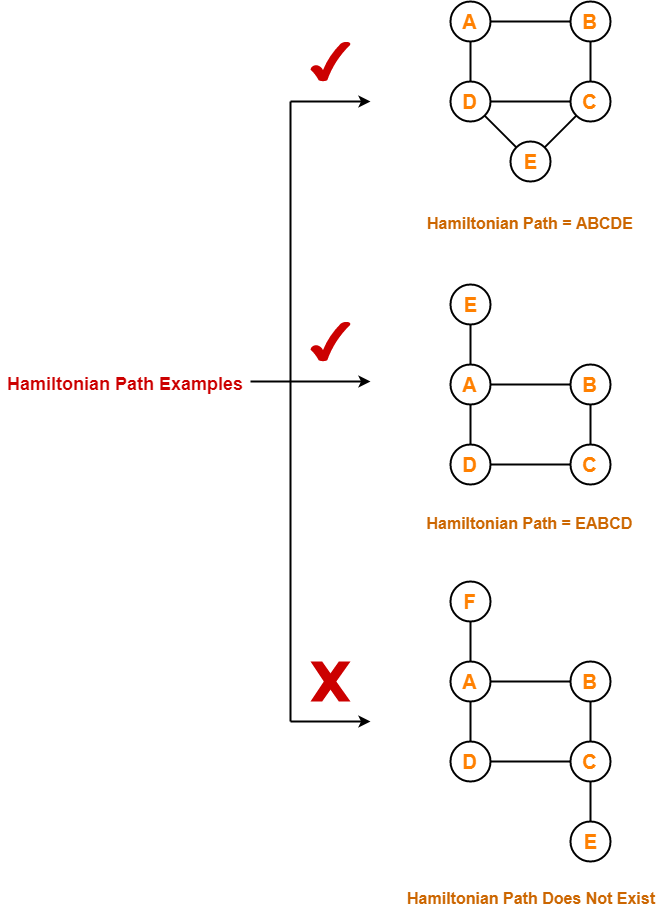
A Hamiltonian path is a specific type of path that visits each vertex in the graph exactly once. It starts at one vertex and ends at another, traversing every single designated point without repetition. If, in addition to visiting every vertex once, the path also returns to its starting vertex, it is then called a Hamiltonian cycle.
Consider a drone tasked with inspecting five specific towers in a wind farm. A Hamiltonian path would represent a flight route that visits each of those five towers once and only once, ensuring no tower is missed and no unnecessary revisits occur, thus optimizing flight time and battery life. The challenge lies not just in finding a path, but often in finding the most efficient Hamiltonian path, which adds another layer of complexity to the problem.
The Challenge of Efficiency
While the definition of a Hamiltonian path seems straightforward, finding one in a complex graph (one with many vertices and edges) is far from trivial. The problem of determining whether a Hamiltonian path exists in a given graph, and finding it if it does, is known as an NP-complete problem. This means that as the number of vertices increases, the computational time required to find a solution grows exponentially. For real-world applications with dozens or even hundreds of waypoints, brute-force methods (checking every possible combination) quickly become infeasible.
This inherent computational complexity necessitates the development of sophisticated algorithms and heuristic approaches. These algorithms don’t always guarantee the absolute optimal solution in polynomial time, but they can provide very good, near-optimal solutions within practical timeframes. This is particularly relevant for drone technology, where rapid path planning is often essential for dynamic operations and autonomous decision-making. The quest for efficient Hamiltonian path algorithms directly contributes to the advancement of autonomous flight systems, allowing drones to tackle increasingly complex tasks with greater independence.
Hamiltonian Paths in Autonomous Drone Flight
The theoretical framework of Hamiltonian paths finds immense practical utility in the realm of autonomous drone flight. For drones designed to perform complex, multi-point missions without constant human intervention, the ability to plan an optimal route is paramount. This directly impacts mission efficiency, battery endurance, and data acquisition quality, making it a cornerstone of modern drone innovation.
Optimizing Survey and Mapping Missions
One of the most significant applications of Hamiltonian paths in drone technology is in optimizing survey and mapping missions. Consider a drone tasked with capturing high-resolution imagery or LiDAR data over a large agricultural field, an urban development, or a construction site. Such missions often involve covering a specific area or visiting a series of predefined waypoints to ensure comprehensive data collection for photogrammetry, 3D modeling, or environmental monitoring.
If the mission requires the drone to gather data from distinct, critical points within the area – perhaps specific crop samples, structural anomalies, or geological markers – a Hamiltonian path algorithm can be employed. Each critical point becomes a vertex in a graph, and the edges represent potential flight segments between them. The algorithm then computes a path that visits every designated point exactly once. This ensures that no crucial data point is missed and that the drone avoids redundant travel, conserving precious battery life and minimizing mission time. For large-scale projects, this optimization can translate into substantial cost savings and improved operational timelines, pushing the boundaries of what remote sensing can achieve.
Inspection Routes and Multi-Point Coverage
Beyond broad area mapping, autonomous drones are increasingly deployed for detailed inspections of infrastructure, such as power lines, pipelines, bridges, wind turbines, and industrial facilities. These inspections often require the drone to meticulously examine numerous specific points or segments to identify defects, wear, or damage.
For example, inspecting a large bridge might involve examining dozens of structural joints, cable anchor points, and deck sections. Each of these inspection points can be modeled as a vertex. A Hamiltonian path algorithm can then generate an optimized flight plan that guides the drone through every required inspection point in an efficient sequence. This not only guarantees complete coverage but also streamlines the inspection process, reducing the risk of human error in navigation and allowing operators to focus on data analysis rather than complex flight control. In scenarios involving multiple drones or swarm intelligence, finding Hamiltonian paths or cycles becomes even more critical for coordinating tasks and ensuring collaborative, non-overlapping coverage across a vast array of inspection targets.
Enhancing AI and Remote Sensing Applications
The integration of Hamiltonian path algorithms with artificial intelligence (AI) and advanced remote sensing capabilities represents a significant leap forward in drone technology. These algorithms empower drones to move beyond simple waypoint navigation, enabling more intelligent and adaptive mission execution.
Intelligent Route Generation for Data Collection
AI-powered drones are designed to make autonomous decisions, adapting to environmental changes and optimizing their actions in real-time. When it comes to data collection for remote sensing, such as multispectral imaging for precision agriculture or thermal scanning for infrastructure monitoring, intelligent route generation is key. Instead of following a rigid pre-programmed grid, an AI system can analyze incoming sensor data or pre-existing geographical information to identify points of interest or areas requiring more detailed scrutiny.
If these points are dynamic or emerge during the mission, the AI can then dynamically re-calculate a Hamiltonian path or a series of paths to efficiently visit these newly identified targets. For instance, in an agricultural survey, if the drone’s AI detects signs of disease in a specific cluster of plants via multispectral analysis, it can adjust its ongoing mission to prioritize and revisit those areas for more detailed inspection, integrating these new points into an optimized Hamiltonian sub-path. This level of adaptive intelligence, rooted in efficient pathfinding algorithms, drastically improves the quality and relevance of collected data, pushing the envelope of remote sensing capabilities.
Overcoming Computational Complexity
The aforementioned NP-complete nature of finding Hamiltonian paths poses a significant challenge, especially for AI systems that need to generate paths quickly in dynamic environments. To overcome this, innovative approaches are being developed, including:
- Heuristic Algorithms: These algorithms, such as genetic algorithms, simulated annealing, or ant colony optimization, don’t guarantee the absolute optimal solution but provide excellent approximations in a reasonable timeframe. AI systems can leverage these heuristics to quickly generate viable Hamiltonian paths even for large sets of waypoints.
- Machine Learning (ML) for Path Prediction: ML models can be trained on vast datasets of successful drone missions and environmental conditions. These models can learn patterns and predict optimal or near-optimal Hamiltonian path strategies for new scenarios, reducing the computational burden of real-time path calculation.
- Graph Simplification and Partitioning: For extremely large graphs (many vertices), the problem can be broken down into smaller, manageable sub-problems. An AI system might partition a large survey area into smaller segments, solve the Hamiltonian path problem for each segment, and then integrate these solutions into a cohesive overall mission plan. This modular approach allows for scalable and efficient autonomous operations.
By integrating these advanced computational techniques, drones can handle increasingly complex missions autonomously, allowing for real-time decision-making, adaptive navigation, and robust data collection strategies, thereby continually enhancing their role in tech and innovation.

Future Implications for Drone Innovation
The continuous advancement in solving the Hamiltonian path problem, particularly through AI and optimized algorithms, will profoundly impact future drone innovation. As drones become more autonomous and capable of operating in increasingly complex and dynamic environments, the need for sophisticated path planning will only grow.
Imagine fleets of drones collaborating to map disaster zones, each drone covering a distinct set of critical areas identified by a central AI, all working within an overarching Hamiltonian cycle to ensure no area is missed and communication lines are maintained. Or consider urban air mobility, where package delivery drones navigate intricate cityscapes, their routes optimized as Hamiltonian paths to maximize efficiency and minimize delivery times across multiple drop-off points.
Further research into quantum computing and specialized hardware accelerators could potentially tackle the NP-complete challenge of Hamiltonian paths with unprecedented speed, unlocking even more complex and dynamic autonomous mission capabilities. This synergy between theoretical computer science, advanced AI, and cutting-edge hardware development positions Hamiltonian path algorithms as a cornerstone for the next generation of intelligent, autonomous drone systems, cementing their role at the forefront of tech and innovation.