The concept of a “domain” is fundamental to understanding relations, particularly within the mathematical and logical frameworks that underpin many advanced technological systems. While the term might sound abstract, its implications are far-reaching, influencing how data is interpreted, processed, and utilized across various fields, including the sophisticated technological domains of flight and imaging. Understanding the domain of a relation is crucial for appreciating the constraints, possibilities, and inherent logic within complex systems like those found in modern flight technology.
The Mathematical Foundation of Relations
At its core, a relation can be thought of as a set of ordered pairs. Each ordered pair connects an element from one set to an element from another set, or sometimes to an element from the same set. These sets are critical components in defining the scope and meaning of the relation.
Sets and Ordered Pairs
Consider two sets, let’s call them Set A and Set B. A relation R from Set A to Set B is a subset of the Cartesian product of A and B, denoted as A × B. The Cartesian product A × B is the set of all possible ordered pairs (a, b) where ‘a’ is an element of A and ‘b’ is an element of B. A relation R is simply a selection of some of these possible pairs.
For example, if Set A = {1, 2, 3} and Set B = {a, b, c}, then the Cartesian product A × B would include pairs like (1, a), (1, b), (1, c), (2, a), (2, b), (2, c), (3, a), (3, b), and (3, c). A relation R could be {(1, a), (2, b), (3, c)}, or it could be {(1, a), (1, b), (2, c)}.
Defining the Domain and Codomain
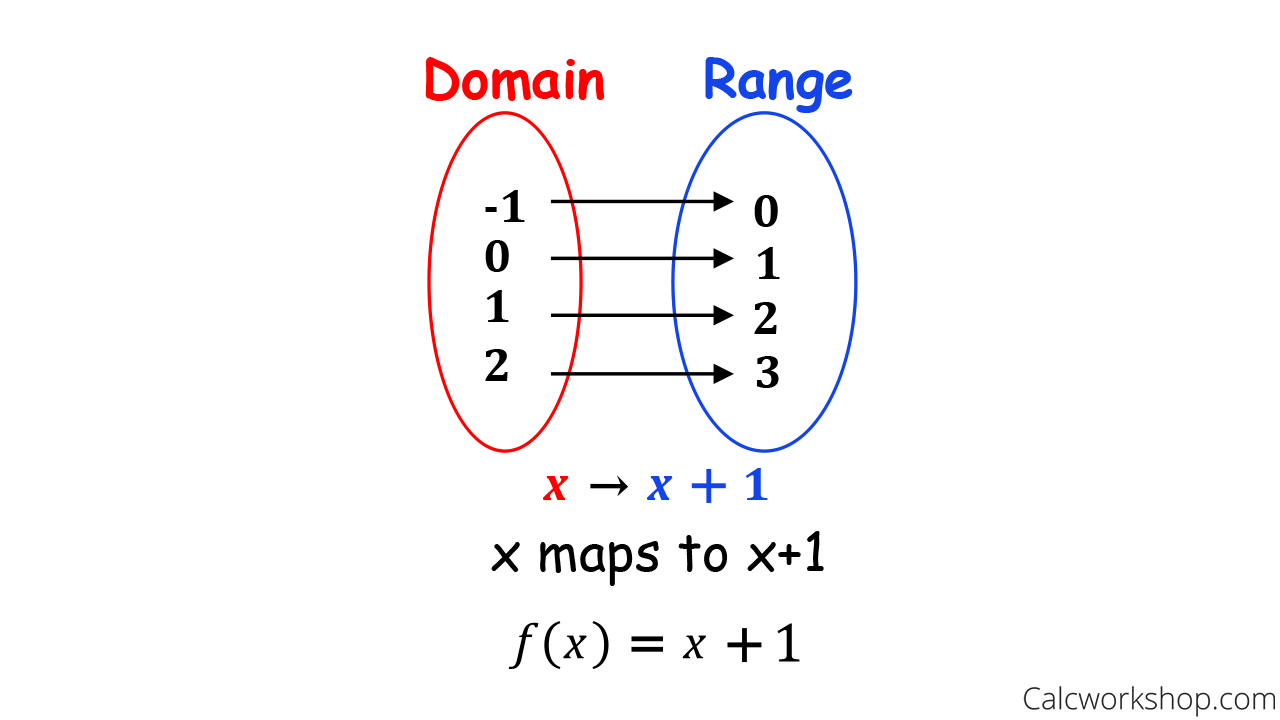
Within this framework of ordered pairs, two crucial concepts emerge: the domain and the codomain (often referred to as the range, though technically distinct).
The domain of a relation R from Set A to Set B is the set of all first elements (the ‘a’ in the pair (a, b)) of the ordered pairs in R. In simpler terms, it’s the set of all possible inputs or starting points for the relation.
The codomain of a relation R from Set A to Set B is the set B itself. It represents the set of all possible outputs.
The range of a relation R is the set of all second elements (the ‘b’ in the pair (a, b)) of the ordered pairs in R. The range is always a subset of the codomain.
Let’s revisit our example: If R = {(1, a), (2, b), (3, c)}, then:
- The domain of R is {1, 2, 3}.
- The codomain of R is {a, b, c}.
- The range of R is {a, b, c}.
If R = {(1, a), (1, b), (2, c)}, then:
- The domain of R is {1, 2}. Notice that ‘3’ is not included because there are no pairs in R starting with ‘3’.
- The codomain of R is {a, b, c}.
- The range of R is {a, b, c}.
This distinction is vital. The domain defines what inputs the relation can accept or process, while the codomain defines the universe of possible outputs. The range, on the other hand, specifies the actual outputs produced by the relation for the given inputs within its domain.
The Domain in the Context of Flight Technology
Now, let’s translate these mathematical concepts into the practical world of flight technology. In this domain, “relations” often represent the connection between different states, measurements, commands, or environmental factors. Understanding the “domain of a relation” helps us grasp the operational boundaries and logical constraints of various flight systems.
Navigation Systems and Sensor Data
Consider a relation describing the connection between GPS satellite signals and the drone’s calculated position. The domain of this relation would be the set of all valid GPS signal strengths and characteristic data received by the drone’s receiver. This includes factors like signal-to-noise ratio, Doppler shift, and pseudorange measurements. The codomain could be the set of all possible 3D coordinates in space. The range would be the actual set of 3D coordinates the drone calculates based on the received signals.
If the GPS receiver cannot acquire a sufficient number of satellite signals, or if the signals are too weak or corrupted, the input data falls outside the domain of a reliable position-calculating relation. Consequently, the system cannot produce an accurate output (a valid position within the expected range). This highlights why robust sensor inputs are crucial – they must fall within the defined domain of the algorithms that process them.
GPS Accuracy and Signal Acquisition
The domain of GPS signal reception is influenced by environmental factors like atmospheric conditions, signal obstruction (e.g., buildings, dense foliage), and the number of visible satellites. When these factors degrade the signal quality below a certain threshold, the data becomes unreliable and may effectively be outside the “valid” domain for accurate position calculation. Flight controllers are designed to recognize when input data is outside its expected domain and may trigger safety protocols, such as holding position or initiating a return-to-home sequence.
Stabilization Systems and Sensor Fusion

Stabilization systems, like those using Inertial Measurement Units (IMUs) – accelerometers and gyroscopes – rely on relations to maintain the drone’s attitude. The IMU provides raw sensor data, which is then processed by complex algorithms to derive orientation and angular velocity.
The domain of the relation for an accelerometer might be the range of accelerations it can accurately measure (e.g., ±16g). If the drone experiences an acceleration outside this range (e.g., during a severe impact), the sensor’s output would be unreliable or saturate, effectively exiting the operational domain of the stabilization algorithm.
Similarly, gyroscopes have a domain defined by their measurable angular rates. If the drone spins too fast, exceeding the gyroscope’s range, the data becomes less meaningful for precise stabilization.
Sensor Fusion and Data Validity
Sensor fusion involves combining data from multiple sensors (e.g., IMU, barometer, GPS) to achieve a more accurate and robust understanding of the drone’s state. The relation here connects raw sensor readings to a fused state estimate (e.g., pitch, roll, yaw). The domain of this fused relation is the set of all possible valid combinations of readings from the individual sensors. If one sensor provides anomalous data (e.g., a barometer reading indicating a sudden, impossible altitude change due to temporary interference), this data point might be considered outside the expected domain of “normal” atmospheric pressure fluctuations. The fusion algorithm is designed to identify such outliers and either discard them or assign them a lower weight, preventing them from corrupting the overall state estimate.
Obstacle Avoidance Systems
Obstacle avoidance systems utilize sensors like lidar, radar, or stereo cameras to detect objects in the drone’s path. The relation here connects the sensor data to a determination of whether an obstacle is present and its proximity.
The domain of the relation for a lidar sensor, for instance, is the range of distances it can accurately measure and the angular resolution at which it can detect objects. If an object is too far, too close, or too small/stealthy to be detected by the lidar’s operating domain, it will not be registered as an obstacle.
Environmental Constraints on Sensor Domains
The effectiveness of obstacle avoidance is also constrained by the environment. A lidar sensor’s domain might be significantly reduced in heavy fog or rain, as the light pulses are scattered or absorbed, leading to unreliable distance measurements. Similarly, a camera-based system’s domain might be limited by poor lighting conditions or reflective surfaces. When sensor inputs fall outside their designed operational domain, the obstacle avoidance system may become inoperative or its reliability severely compromised, requiring the drone’s pilot or autonomous system to exercise caution.
Implications for Autonomous Flight
The principles of domains and relations are paramount in autonomous flight. Every decision an autonomous drone makes is based on complex internal “relations” that interpret sensor data and external conditions.
Path Planning and Decision Making
Consider an autonomous drone tasked with navigating a complex environment. Path planning algorithms create a series of waypoints or a continuous trajectory. This process involves relations that map the drone’s current state (position, velocity, altitude) and environmental data (detected obstacles, terrain information) to a desired next state or command.
The domain of the relation for path planning includes all possible valid states the drone can be in and all possible environmental configurations it might encounter. If the drone’s state deviates unexpectedly, or if it encounters an unmapped obstacle or a sudden environmental change (like a strong gust of wind), these new conditions might lie outside the domain for which the current path was planned. The autonomous system must have robust contingency plans and the ability to redefine relations (e.g., re-plan the path) when faced with inputs outside the expected domain.
AI Follow Mode and Dynamic Environments
In AI follow modes, the drone is programmed to track a subject. The relation here connects the subject’s observed movement and characteristics to the drone’s commanded flight path. The domain of this relation encompasses the range of speeds, directions, and potential erratic movements the subject might exhibit, as well as the environmental conditions that could affect tracking accuracy. If the subject suddenly accelerates beyond the drone’s pursuit capabilities, or if environmental factors (like occlusion by other objects) momentarily remove the subject from the drone’s sensor domain, the follow relation might fail, requiring the system to revert to a safe fallback mode.
Data Processing and Interpretation
Beyond direct flight control, the concept of domain is critical in how data collected by drones is processed and interpreted, particularly for applications like mapping and remote sensing.
Mapping and Remote Sensing Applications
When a drone is used for aerial mapping, its camera and sensors capture data (images, lidar scans, thermal readings). Relations are used to stitch these pieces of data together, georeference them, and extract meaningful information. The domain of the relation for image stitching, for example, would be the set of all possible overlapping image pairs with sufficient visual features for correlation. If images are taken with extreme parallax, poor lighting, or at drastically different altitudes, they might fall outside the domain of successful automatic stitching.
Similarly, in thermal imaging, the relation maps infrared radiation signatures to temperature values. The domain of this relation is defined by the thermal sensitivity of the camera and the range of temperatures it can accurately detect. If the target temperature is significantly outside this range, the readings will be inaccurate. Understanding these domains is essential for ensuring the reliability and accuracy of the data collected.

Conclusion: Precision Through Defined Domains
The “domain of a relation” is not merely an academic mathematical concept; it is a fundamental principle that underpins the design, operation, and reliability of sophisticated flight technology. From the precise calculations of GPS receivers to the complex decision-making of autonomous flight systems and the detailed interpretation of aerial imagery, understanding and respecting the defined domains of the various relations at play is paramount. It dictates what data is meaningful, what operations are possible, and what limitations exist. By carefully defining and adhering to these domains, engineers and developers ensure that drones can navigate, perceive, and interact with their environment with the precision and safety required for advanced applications in flight, imaging, and beyond.