In the dynamic world of drone technology and innovation, the underlying mathematical principles that govern autonomous flight, precise navigation, and sophisticated data analysis are often complex yet fundamental. Among these, the concept of a cubic function emerges as a surprisingly versatile tool, far removed from mere academic exercise. While seemingly abstract, cubic functions play a critical role in shaping the sophisticated algorithms that enable everything from smooth cinematic flight paths to intelligent mapping and predictive analytics in unmanned aerial systems (UAS). Understanding what a cubic function is and, more importantly, how it’s applied within drone technology, provides deeper insight into the engineering marvels that power modern aerial innovation.

The Mathematical Foundation for Advanced Drone Operations
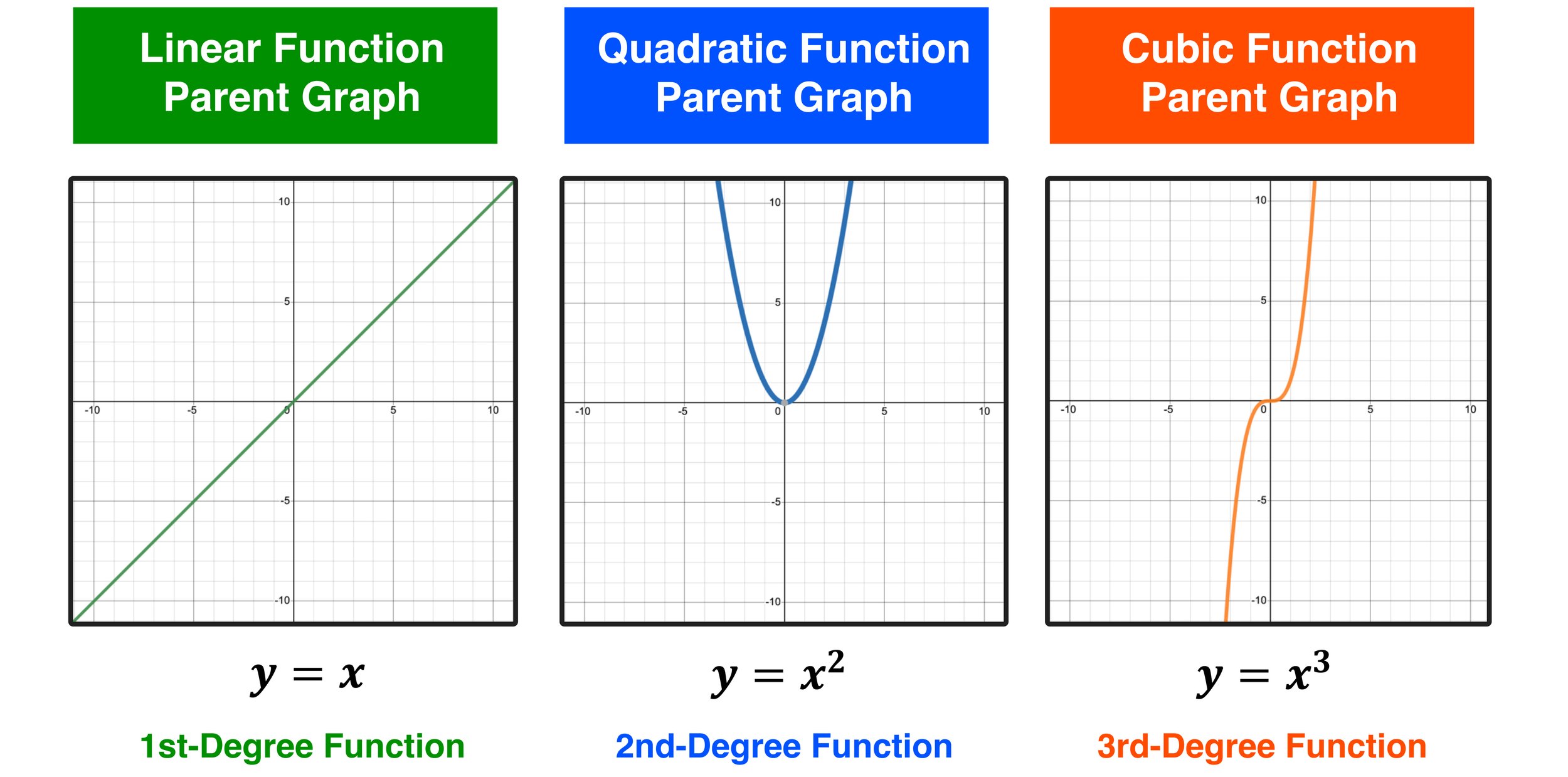
At its core, a cubic function is a polynomial function of degree three. This means the highest exponent of the variable in the function is three. Mathematically, it’s expressed in the general form:
$f(x) = ax^3 + bx^2 + cx + d$
Where ‘a’, ‘b’, ‘c’, and ‘d’ are coefficients, and ‘a’ cannot be zero (otherwise it would be a quadratic or linear function). The variable ‘x’ typically represents an independent variable, and $f(x)$ or ‘y’ represents the dependent variable. Unlike simpler linear or quadratic functions, cubic functions possess a unique set of characteristics that make them particularly useful for modeling complex, non-linear behaviors and smooth transitions – qualities highly desirable in drone control and data processing.
Defining the Core Equation
The four coefficients (a, b, c, d) are crucial as they dictate the shape and position of the cubic curve. A positive ‘a’ coefficient generally means the function starts low and ends high, while a negative ‘a’ coefficient means it starts high and ends low. The other coefficients fine-tune the turning points and overall curvature. For drone applications, these coefficients are not arbitrary numbers but are often derived from real-world constraints, desired trajectories, or collected sensor data. They represent parameters that can be tuned to achieve specific flight characteristics or to accurately model environmental factors.
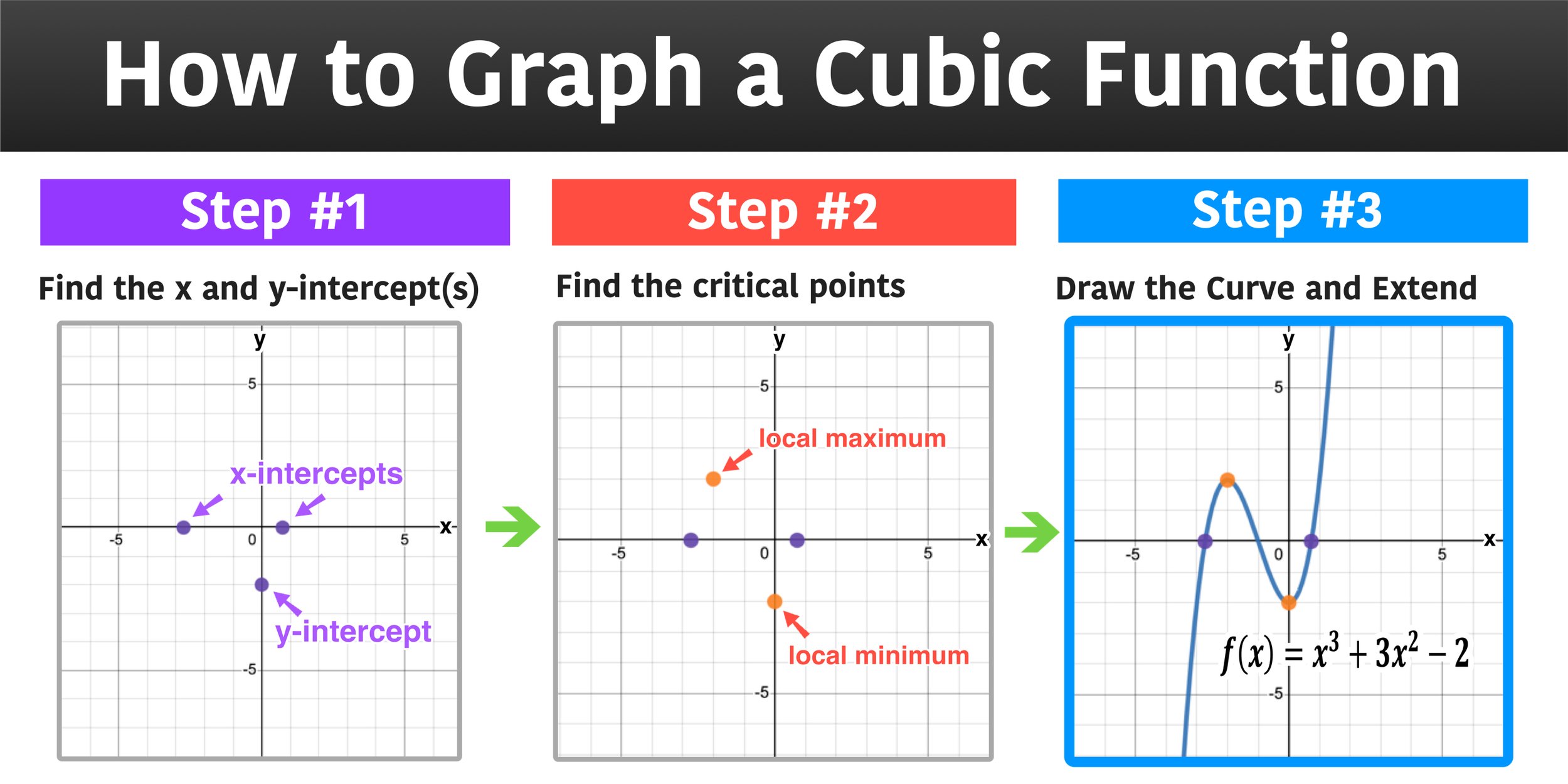
Characteristics and Graphical Representation
The graph of a cubic function is characterized by its distinct ‘S’ or ‘N’ shape, or sometimes a shape resembling a stretched parabola with a bend. Crucially, a cubic function can have up to two turning points (local maxima or minima) and one inflection point where the curve changes concavity. This inherent ability to represent curves with multiple bends and smooth transitions is precisely why cubic functions are invaluable in drone technology. Imagine a drone needing to execute a graceful turn, ascend, level off, and then descend while maintaining precise control; such a complex, smooth path is difficult to describe with simple linear or parabolic equations but is naturally accommodated by a cubic function. The smooth, continuous nature of cubic polynomials ensures that derivative properties like velocity and acceleration remain well-behaved, preventing abrupt changes in control inputs that could destabilize a drone.
Cubic Functions in Drone Trajectory Planning and Autonomous Flight
One of the most significant applications of cubic functions in drone technology lies in the realm of trajectory generation and autonomous flight control. For drones to perform complex missions, whether it’s inspecting infrastructure, delivering packages, or capturing cinematic footage, they require meticulously planned and executed flight paths that are both efficient and stable.
Smooth Path Generation
Cubic splines, which are piecewise cubic polynomials, are extensively used to create smooth and continuous flight paths. Instead of connecting a series of waypoints with straight lines (which would result in jerky motion and inefficient energy consumption), a drone’s flight control system can use cubic splines to generate a smooth curve that passes through or near these waypoints. This ensures that the drone’s velocity and acceleration change gradually, reducing wear and tear on motors, improving energy efficiency, and enhancing the stability of the flight. For aerial cinematography, this translates directly into fluid, professional-looking camera movements, allowing the drone to arc around subjects or navigate complex environments with unparalleled grace. In autonomous delivery systems, smooth paths minimize jostling of cargo and enable safer, more predictable operations.
Predicting Drone Dynamics and Control
Beyond static path planning, cubic functions can be integrated into the dynamic models of drones themselves. The forces acting on a drone, such as drag, lift, and thrust, can exhibit non-linear relationships with factors like speed and angle of attack. Cubic functions can be used to approximate these complex aerodynamic characteristics within the drone’s flight control algorithms. By having a more accurate mathematical model of how the drone will respond to control inputs and environmental disturbances, engineers can design more robust and precise control systems (like Model Predictive Control, MPC) that predict the drone’s future state and adjust commands accordingly. This predictive capability, often leveraging polynomial approximations including cubic terms, is vital for maintaining stability in gusty winds or executing precise maneuvers.
Obstacle Avoidance and Evasion Paths
In environments with dynamic obstacles or complex layouts, drones need to quickly and smoothly deviate from their planned path to avoid collisions. When a sensor detects an impending obstacle, the drone’s autonomous navigation system can rapidly compute an evasion trajectory. Cubic functions can be employed here to generate a smooth, collision-free curve that takes the drone around the obstacle and then seamlessly guides it back to its original path or a new target. The ability of cubic functions to represent curves with inflection points makes them ideal for designing evasive maneuvers that are both effective in avoiding obstacles and gentle enough not to destabilize the aircraft.
Data Modeling and Remote Sensing Applications
The analytical power of cubic functions extends significantly into the data processing domain, particularly in remote sensing and mapping performed by drones. Large datasets collected by various onboard sensors often require sophisticated mathematical tools for interpretation, interpolation, and visualization.
Terrain Modeling and Elevation Mapping
Drones equipped with LiDAR (Light Detection and Ranging) or photogrammetry payloads collect vast amounts of point cloud data representing the terrain below. To create continuous, high-resolution 3D models of landscapes, buildings, or infrastructure, this discrete point data needs to be interpolated and approximated. Cubic spline interpolation is a common technique used to generate smooth, continuous surfaces from sparse elevation data. By fitting cubic functions between known data points, algorithms can accurately estimate the elevation at unmeasured locations, resulting in highly detailed and visually coherent digital elevation models (DEMs) or digital surface models (DSMs). This is crucial for applications ranging from precision agriculture and geological surveys to construction site monitoring and urban planning.
Sensor Data Interpolation and Approximation
Beyond terrain mapping, many other types of sensor data collected by drones—such as temperature gradients, air quality readings, or magnetic field variations—can benefit from cubic function-based analysis. If a drone collects data at discrete points, cubic interpolation can provide estimations for areas between these points, creating continuous maps of these parameters. This allows for a more comprehensive understanding of the environmental conditions being monitored. For instance, in monitoring large industrial facilities for anomalies, a drone might take gas readings at specific intervals. Cubic interpolation could then be used to model the gas concentration across the entire area, highlighting potential leak sources with greater precision than simple linear interpolation.
AI and Machine Learning for Advanced Drone Operations
The synergy between cubic functions and artificial intelligence (AI) or machine learning (ML) paradigms unlocks even more sophisticated capabilities for drones, driving towards truly autonomous and intelligent systems.
Predictive Analytics for Flight Optimization
In AI-driven autonomous systems, cubic functions can contribute to predictive analytics models. For example, machine learning algorithms trained on past flight data can use polynomial regression (which often includes cubic terms if the relationship is non-linear) to predict future drone states, energy consumption, or component wear. By understanding these predicted outcomes, the drone’s AI can make real-time decisions to optimize its flight path for maximum efficiency, extend mission duration, or pre-emptively signal maintenance needs. This proactive optimization is a cornerstone of smart drone fleet management and highly complex missions.
Reinforcement Learning and Trajectory Optimization
Reinforcement learning (RL), a powerful AI paradigm where an agent learns through trial and error, can implicitly leverage the principles behind cubic functions for trajectory optimization. When an RL agent (the drone’s AI) is tasked with learning the optimal way to navigate a complex environment or perform a maneuver, it might converge on control policies that inherently generate smooth, cubic-like trajectories. While the RL algorithm doesn’t explicitly ‘know’ about cubic functions, the optimal actions it learns often result in movements that are mathematically well-described by smooth polynomial curves, including cubic ones, due to the inherent penalty for jerky or inefficient movements. The smooth, continuous nature of cubic functions often mirrors the ‘optimal’ physical motion for minimizing energy and maximizing stability.
Real-time Decision Making and Adaptive Control
For drones operating in highly dynamic and unpredictable environments, real-time decision-making and adaptive control are paramount. AI systems on board can continuously re-evaluate mission parameters, environmental conditions, and drone status. If a new constraint arises (e.g., unexpected wind shear, a moving target, or an urgent change in mission objective), the AI can rapidly generate new trajectories. Cubic functions, embedded within the underlying mathematical frameworks of these AI control systems, provide the flexibility and smoothness needed to compute these adaptive paths on the fly, ensuring the drone responds effectively and safely without losing stability. This capability is vital for future applications like urban air mobility (UAM) and complex search and rescue operations where adaptability is key.
Challenges and Future Directions
While cubic functions offer immense utility, their application is not without challenges. Accurately determining the coefficients in real-time, especially for dynamic environments, requires robust sensor data fusion and powerful onboard processing. Overfitting data with high-degree polynomials can also lead to undesirable oscillations if not handled carefully.
Looking ahead, as drone technology continues to advance, the integration of cubic functions with more sophisticated machine learning techniques and quantum computing promises even greater precision and autonomy. Research into adaptive cubic splines that can dynamically adjust their shape based on real-time feedback, or the use of higher-order polynomials for even more intricate maneuvers, will push the boundaries of what drones can achieve. Ultimately, the elegant mathematical properties of cubic functions will continue to be a cornerstone in the ongoing innovation of autonomous aerial systems, enabling safer, more efficient, and more intelligent flight.