In the realm of advanced flight technology, particularly within the sophisticated systems that govern drone navigation and operation, understanding fundamental mathematical concepts is paramount. One such concept, seemingly abstract but deeply embedded in the logic of many flight control algorithms, is that of a “constant function.” While not a direct piece of hardware or a sensor, the constant function is an underlying principle that influences how drones interpret and react to their environment and execute commands. It represents a state or value that remains unchanged, regardless of other variables, and its application in flight technology can range from simple threshold settings to the complex calibration of flight parameters.
The Mathematical Foundation of a Constant Function
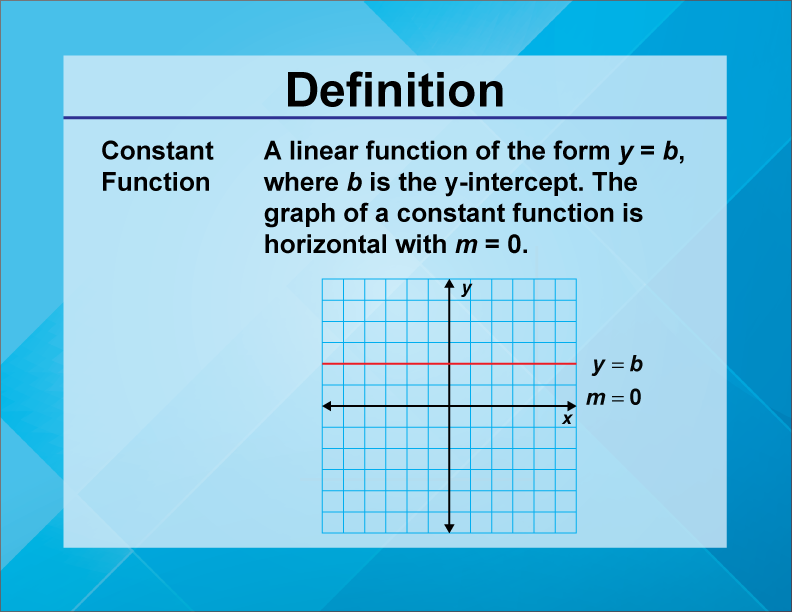
At its core, a function in mathematics describes a relationship between inputs and outputs. A constant function is a special type of function where the output value is the same for every possible input value. Graphically, this is represented by a horizontal line. Mathematically, a constant function is often expressed as $f(x) = c$, where ‘c’ is a specific constant number. This means no matter what value you substitute for ‘x’ (the input), the result ($f(x)$, the output) will always be ‘c’.
For instance, if we consider a function representing the desired altitude of a drone to be $h(t) = 100$ meters, where ‘t’ represents time, this signifies that the drone is programmed to maintain an altitude of exactly 100 meters, irrespective of how time progresses or other external factors that might influence its position. This simplicity is its power. It removes variability from a specific output, allowing other systems to rely on a fixed reference point.
Understanding Input and Output in Flight Systems
In the context of flight technology, the ‘inputs’ to a function can be diverse. They might include sensor readings (like altitude from a barometric sensor or GPS coordinates), commands from a remote controller, environmental conditions (wind speed, temperature), or the drone’s own internal state (battery level, motor speed). The ‘output’ of a function, in turn, could be a control signal to an actuator (adjusting motor thrust, tilting a rotor), a value displayed to the pilot, or a decision made by the autonomous flight system.
When a constant function is employed, it signifies that a particular output is being deliberately held steady, independent of the fluctuating inputs it might receive. This is crucial for establishing stable baselines and ensuring predictable behavior in systems that are inherently dynamic.
Applications of Constant Functions in Drone Flight Technology
The principle of a constant function, though mathematically defined, manifests in numerous practical applications within drone flight technology. These applications are essential for maintaining stability, ensuring safety, and achieving precise control.
Altitude Hold and Waypoint Navigation
One of the most intuitive applications of a constant function is in maintaining a specific altitude. When a drone is instructed to hold its position, the flight controller essentially activates a constant function for altitude. The target altitude is set to a constant value (e.g., 50 meters). The onboard sensors continuously measure the actual altitude, and the flight controller compares this to the desired constant altitude. Any deviation triggers corrective actions – increasing or decreasing motor thrust – to bring the actual altitude back to the constant target. This simple yet critical function is what allows pilots to focus on horizontal movement or camera work without constantly managing vertical position.
Similarly, in waypoint navigation, while the drone’s horizontal position changes, the altitude at each waypoint might be pre-programmed to remain constant. The flight plan specifies a series of points with associated altitudes, and for each point, the target altitude becomes a constant value that the drone strives to maintain until it reaches the next waypoint with a potentially different, but still constant, altitude target for that segment.
Speed Limits and Geofencing Parameters
Constant functions also play a role in setting operational boundaries. For instance, a geofencing system might define a maximum altitude or a maximum horizontal speed that the drone is permitted to reach. These limits are effectively constant values. If the drone’s velocity calculations approach the maximum speed constant, the flight controller will actively limit further acceleration. Likewise, if the drone attempts to ascend beyond a predefined altitude constant, the system will intervene to prevent it. These constants act as safety nets, preventing the drone from venturing into restricted airspace or exceeding its operational capabilities.
Calibration and Reference Points
In more complex scenarios, constant functions are used in calibration routines and for establishing reference points. For example, when calibrating an Inertial Measurement Unit (IMU), the drone might be placed on a perfectly stable, level surface. During this calibration phase, the expected output from the gyroscopes and accelerometers should ideally be zero, representing no motion or acceleration. This “zero” value acts as a constant reference. Any deviation from this constant during the calibration process indicates an error or a need for adjustment.
Furthermore, in advanced stabilization systems, the desired angular rates or acceleration values for maintaining stability might be derived from constant parameters. These parameters are tuned during development and represent ideal conditions for stability, serving as constant targets that the active stabilization algorithms work to achieve and maintain.
The Role of Constants in Autonomous Systems
The emergence of increasingly sophisticated autonomous flight capabilities has further amplified the importance of constant functions, often in conjunction with more dynamic algorithms. Autonomous systems rely on precise, unwavering parameters to make decisions and execute complex maneuvers.
Thresholds for Decision-Making
Autonomous drones often use constant functions as thresholds for triggering specific actions. For example, a drone programmed for autonomous landing might have a constant value representing the minimum safe altitude. Once the drone’s altitude falls below this constant threshold, the landing sequence is initiated. Similarly, a drone performing autonomous inspection might have a constant threshold for detecting a specific anomaly (e.g., a thermal signature exceeding a certain degree Celsius). Once this constant is breached, the drone logs the event and potentially alters its flight path.
Reference Frames and Coordinate Systems
In navigation, the concept of a reference frame is crucial. While the drone’s position and orientation are constantly changing, the underlying coordinate systems often rely on fixed, constant origins and axes. For instance, a global positioning system (GPS) operates within a geodetic coordinate system that is defined by constants. The drone’s position is then calculated relative to this fixed, constant reference frame. Similarly, the definition of “north” or “level” in an inertial navigation system relies on fundamental, constant physical directions.
Error Correction and Compensation
Constant functions are also employed in algorithms designed to compensate for known systematic errors. For instance, if a particular sensor is known to have a consistent bias (e.g., it always reads 0.5 degrees higher than the actual angle), this bias can be modeled as a constant offset. The flight control software then subtracts this constant value from the sensor’s raw readings to obtain a more accurate measurement. This constant compensation ensures that the drone’s behavior is not unduly influenced by predictable sensor inaccuracies.
Advanced Considerations and Dynamic Constants
While the concept of a constant function implies unwavering stability, in real-world flight technology, the “constants” are often not truly static but are dynamically set or are piecewise constant. This distinction is vital for robust system design.
Piecewise Constant Functions
In many applications, the desired output changes but remains constant for defined periods. For example, a drone performing a surveillance mission might ascend to a constant altitude of 100 meters for ten minutes, then ascend to a constant altitude of 150 meters for another five minutes. The altitude function is then piecewise constant, changing its constant value at specific time intervals or when certain conditions are met. This approach allows for more complex mission profiles while still leveraging the stability of constant values for specific phases of operation.
Control Loops and Setpoints
The setpoint in a feedback control loop is a prime example of a value that is often treated as a constant for the duration of a specific control task. For example, the target speed for cruise control in a drone is a setpoint. While the actual speed might fluctuate slightly due to wind or terrain, the control system’s objective is to keep the actual speed as close as possible to this constant setpoint. When the pilot changes the desired speed, a new constant setpoint is established.
Adaptive Systems and Tuneable Constants
In highly advanced systems, some constants might be adaptive, meaning they can be adjusted over time based on learned behavior or changing environmental conditions. While the function itself might still be constant at any given moment, the value of the constant ‘c’ might be updated by a higher-level learning algorithm. For example, a drone’s optimal stabilization parameters might be adjusted in real-time to account for varying payloads or atmospheric conditions. In this scenario, the parameter is a “tuneable constant” that is held constant until the adaptive system deems a change necessary.

Conclusion
The constant function, a fundamental concept in mathematics, serves as a crucial underlying principle in the intricate world of drone flight technology. From maintaining stable altitudes and speeds to defining operational boundaries and enabling precise navigation, the application of fixed, unchanging values provides the bedrock of reliability and control. Whether it’s the straightforward stability of an altitude hold or the more nuanced role in autonomous decision-making and error compensation, understanding and implementing constant functions are indispensable for the safe, efficient, and effective operation of modern unmanned aerial vehicles. The ability to define and maintain these unwavering parameters, even within dynamic and complex systems, is a testament to the power of fundamental mathematical principles in shaping cutting-edge technology.