In the rapidly evolving world of drone technology, innovation often hinges on the efficiency and robustness of underlying computational processes. From autonomous navigation systems to sophisticated remote sensing applications, the ability to manage and retrieve vast amounts of data quickly and reliably is paramount. This is where foundational computer science concepts, such as the AVL tree, play an unsung yet critical role. An AVL tree, standing for Adelson-Velsky and Landis tree, is a self-balancing binary search tree – a data structure renowned for its consistent performance guarantees and its ability to maintain order even under dynamic conditions. While not a piece of hardware or a specific drone feature, understanding the AVL tree illuminates a key aspect of the “Tech & Innovation” that empowers the next generation of unmanned aerial vehicles (UAVs).
Understanding the Core: Binary Search Trees and Balancing
To fully grasp the significance of an AVL tree, it’s essential to first understand its ancestor: the binary search tree (BST). A binary search tree is a node-based data structure where each node has at most two children, referred to as the left child and the right child. The defining property of a BST is that for any given node, all values in its left subtree are less than the node’s value, and all values in its right subtree are greater than the node’s value. This structural organization allows for efficient searching, insertion, and deletion operations, typically in logarithmic time complexity (O(log n)), where ‘n’ is the number of nodes in the tree. This efficiency stems from the ability to eliminate half of the remaining data with each comparison, akin to how one might find a word in a dictionary.
The Need for Balance: Why Simple BSTs Fall Short
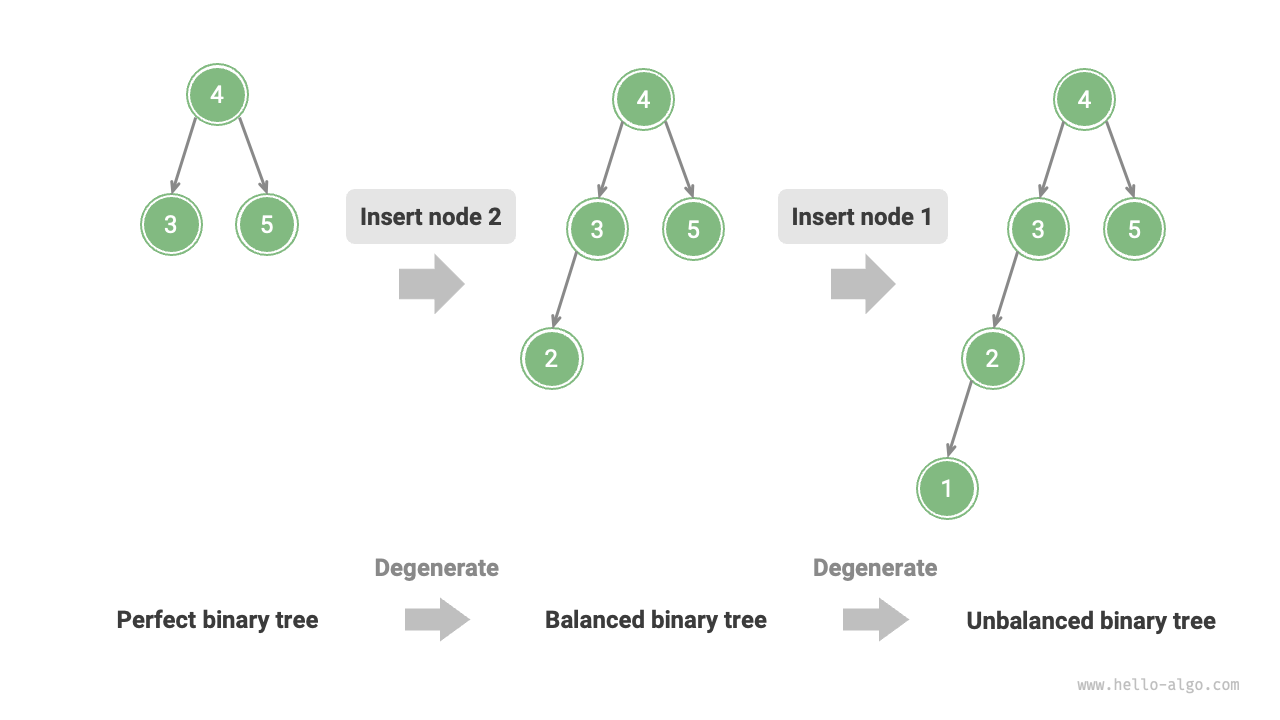
While elegant in principle, a fundamental flaw exists in a plain binary search tree: its performance is heavily dependent on the order in which data is inserted. In the worst-case scenario, if data is inserted in strictly ascending or descending order, a BST can degenerate into a structure resembling a linked list. In such a “skewed” or “degenerate” tree, operations that should take O(log n) time instead degrade to O(n) time, effectively losing all the benefits of the tree structure. For a drone managing hundreds of data points per second for real-time navigation or environmental mapping, this unpredictable performance can lead to critical delays, system instability, or even mission failure. This inherent vulnerability to worst-case input sequences highlights the critical need for a mechanism to maintain the tree’s balance.
How AVL Trees Achieve Balance: Rotation Mechanisms
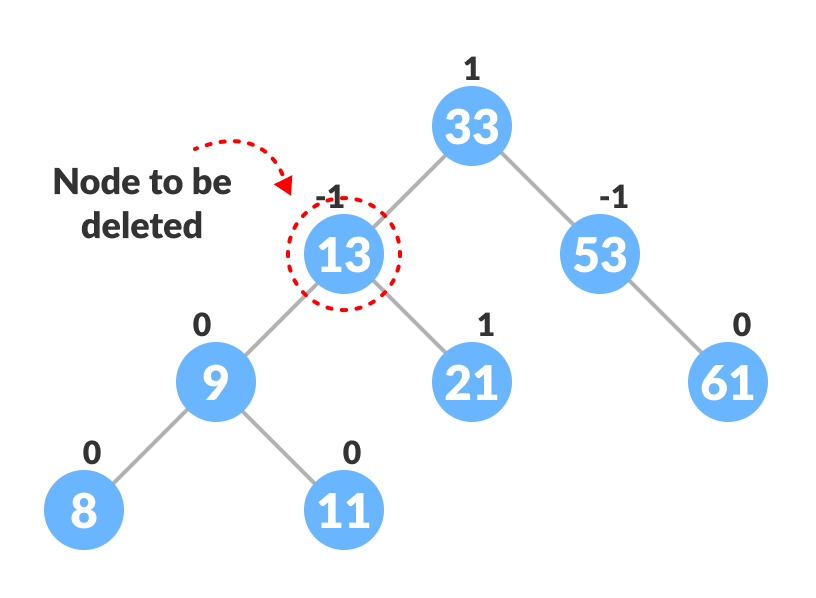
This is precisely where the AVL tree shines. An AVL tree is a self-balancing BST that ensures the height difference between the left and right subtrees of any node is never more than one. This strict balance factor (difference in heights) of -1, 0, or 1 is maintained after every insertion or deletion operation. If an operation causes the tree to become unbalanced, the AVL tree automatically performs a series of rotations to restore balance. These rotations are local transformations that rearrange nodes within the tree without violating the BST property.
There are primarily four types of rotations:
- Left Rotation: Used when a node’s right child is heavy, and an insertion occurred in the right child’s right subtree.
- Right Rotation: Used when a node’s left child is heavy, and an insertion occurred in the left child’s left subtree.
- Left-Right Rotation: A combination of a left rotation on the left child, followed by a right rotation on the parent. This addresses situations where a node’s left child is heavy, and an insertion occurred in the left child’s right subtree.
- Right-Left Rotation: A combination of a right rotation on the right child, followed by a left rotation on the parent. This handles cases where a node’s right child is heavy, and an insertion occurred in the right child’s left subtree.
By meticulously applying these rotations, AVL trees guarantee that their height remains logarithmic (O(log n)) even in the worst-case scenario, thus ensuring consistent and predictable performance for all fundamental operations.
The Practical Advantages of AVL Trees in Tech
The self-balancing nature of AVL trees translates into significant practical advantages for any system dealing with dynamic, high-volume data, making them an excellent choice for the demanding environment of modern technology.
Performance Guarantees: Time Complexity
The most compelling advantage of AVL trees is their unwavering commitment to logarithmic time complexity for search, insertion, and deletion operations. Unlike a vanilla BST, which can degrade to linear time, an AVL tree guarantees O(log n) for these operations, irrespective of the input data order. This consistency is invaluable in real-time systems where unpredictable delays are unacceptable. For example, if a drone’s navigation system needs to query a database of known obstacles or map features, an AVL tree ensures that the lookup time remains fast and predictable, even if new obstacles or map updates are constantly being added to the system. This deterministic performance is a cornerstone for building reliable and safe autonomous systems.
Real-World Scenarios: Where Predictability Matters
In high-stakes technical applications, “average case” performance often isn’t enough; systems must perform reliably even in the worst-case. Consider an autonomous drone tasked with inspecting infrastructure or delivering packages. It continuously receives sensor data (Lidar, camera, GPS), builds a local map, identifies objects, and adjusts its flight path. Each of these sub-tasks involves storing, updating, and querying data. A system built on data structures with inconsistent performance could lead to:
- Navigation Errors: Slow processing of new obstacle data could result in collisions.
- Delayed Responses: Inability to quickly retrieve command information could make the drone unresponsive.
- Resource Inefficiency: Higher processing loads due to linear time operations would drain battery faster and require more powerful, heavier hardware.
AVL trees, by providing guaranteed O(log n) performance, contribute to the overall stability, responsiveness, and safety of such complex systems. They ensure that the computational backbone can handle the dynamic nature of real-world operational environments without bottlenecks.

AVL Trees and Drone Technology: Strategic Applications
While an AVL tree isn’t something you’d find physically bolted onto a drone, its principles are deeply embedded in the software and algorithms that power sophisticated drone functionalities under the “Tech & Innovation” umbrella.
Managing Dynamic Data for Autonomous Navigation
Autonomous drones require intricate navigation systems capable of processing vast amounts of spatial data in real-time. This includes storing and updating information about known waypoints, no-fly zones, dynamic obstacles, and environmental features. An AVL tree can be used to:
- Store and Query Map Data: Efficiently manage a database of geographical points, features, or even segments of a 3D environment. As the drone explores or receives updates, new map data can be inserted, and existing data can be quickly queried for path planning or localization.
- Obstacle Database Management: For obstacle avoidance, drones maintain a dynamic list of detected obstacles. An AVL tree can store these obstacles (perhaps indexed by coordinates or proximity), allowing the drone to rapidly search for potential collisions and update its understanding of the environment as new obstacles are detected or old ones move out of range.
- Flight Path Optimization: While path planning itself involves graph algorithms, managing intermediate waypoints or segments of a planned route, especially when routes need frequent recalculation due to new information, can benefit from AVL-like structures to ensure quick access and modification.
Optimizing Sensor Data Processing for Remote Sensing and Mapping
Drones equipped with advanced sensors (Lidar, multispectral cameras, thermal imagers) generate enormous datasets for applications like 3D mapping, agricultural analysis, and environmental monitoring.
- Point Cloud Management: Lidar sensors generate dense point clouds. Efficiently storing, querying, and updating subsets of this data, especially for real-time visualization or feature extraction, can leverage AVL trees to index spatial data points, ensuring fast access based on coordinates or other attributes.
- Data Fusion and Indexing: When combining data from multiple sensors, an AVL tree can help in indexing fused datasets. For instance, creating an efficient lookup structure for identifying specific regions of interest based on combined sensor readings (e.g., finding all areas with a certain thermal signature and specific vegetation index).
- Dynamic Region-of-Interest (ROI) Tracking: For tasks like monitoring specific objects or areas, an AVL tree can efficiently store and update the boundaries or characteristics of multiple ROIs, allowing the drone to quickly locate and focus its sensors on relevant targets.
Enhancing AI and Machine Learning Algorithms in Drones
Artificial intelligence (AI) and machine learning (ML) are at the heart of many advanced drone features, such as AI follow mode, object recognition, and intelligent decision-making.
- Efficient Lookup Tables: AI models often rely on large lookup tables or knowledge bases. AVL trees can provide a fast and reliable mechanism for searching these tables, whether for decision rules, object classifications, or training data parameters.
- Supporting Decision Trees: While not directly an AVL tree, the concept of balanced tree structures is fundamental to optimizing decision-tree-based algorithms (like Random Forests or Gradient Boosting) used in on-board AI for tasks such as identifying crops, detecting anomalies, or classifying objects in real-time. Efficient data access can speed up the traversal and evaluation of these trees.
- Managing Training Data Subsets: For on-device machine learning, where models might be incrementally updated or fine-tuned, an AVL tree could help manage subsets of training data or feature vectors, allowing for quick retrieval of relevant samples.
Supporting Efficient Resource Management
Beyond direct operational tasks, the internal systems of a drone – its flight controller, mission computer, and communication modules – also benefit from efficient data management.
- Task Scheduling: In complex multi-threaded drone software, an AVL tree could be used to implement a priority queue for managing tasks, ensuring that high-priority operations (like emergency maneuvers) are always processed swiftly.
- Log and Event Management: Storing and querying system logs, diagnostic data, or event histories can be made more efficient with AVL trees, allowing engineers or autonomous systems to quickly identify and analyze critical incidents or performance metrics.
- Sensor Data Streams: Managing and buffering various sensor data streams efficiently before processing or transmission.
Implementing and Choosing AVL Trees
While the theoretical benefits are clear, practical implementation involves considerations. Many programming languages offer standard library implementations of balanced trees (often Red-Black trees, a close cousin of AVL trees, which offer similar performance guarantees with slightly less strict balancing rules).
When to Opt for an AVL Tree
AVL trees are an excellent choice when:
- Consistent performance is critical: Applications where O(log n) time complexity is absolutely required for all operations, even in worst-case scenarios.
- Frequent insertions and deletions: Systems that involve constant updates to their data sets.
- Dynamic data: The dataset is not static and changes frequently during operation.
- Memory vs. Speed: While slightly more complex to implement and maintain than a simple BST, the trade-off in memory overhead (due to storing balance factors) is often justified by the significant performance gains and predictability.
Considerations and Alternatives
For many applications, particularly those where strict worst-case guarantees are slightly relaxed, other balanced tree structures like Red-Black Trees might be preferred. Red-Black trees offer similar O(log n) performance but with less strict balancing rules, leading to fewer rotations on average. This can sometimes result in faster insertion/deletion operations in practice, though with a slightly taller maximum height compared to AVL trees. Another alternative, especially for very large datasets stored on disk, are B-trees or B+ trees, which are optimized for disk I/O. The choice depends on the specific requirements of the drone’s system, including memory constraints, frequency of updates, and the criticality of worst-case performance.
Conclusion
The “What is an AVL Tree” question, when viewed through the lens of drone “Tech & Innovation,” reveals a profound connection between fundamental computer science principles and cutting-edge autonomous systems. AVL trees, by guaranteeing efficient and predictable data management, serve as a foundational building block for the complex algorithms that enable autonomous flight, sophisticated remote sensing, and intelligent AI features in modern drones. They embody the unseen but vital technical infrastructure that underpins the reliability, speed, and safety of these remarkable aerial machines, pushing the boundaries of what’s possible in the skies above. As drone technology continues to advance, the importance of robust and efficient data structures like the AVL tree will only grow, cementing their role as a cornerstone of future innovation.