The term “TTY” (teletypewriter) might seem archaic in the age of graphical interfaces and touchscreens, but understanding its origins and function is crucial for appreciating the evolution of human-computer interaction, especially within the context of systems that rely on precise command-line control and logging. While not directly a drone component in the modern sense, the principles behind TTYs—namely, direct input/output and a standardized communication channel—underpin many advanced functionalities in drone technology, particularly in areas like autonomous flight programming, diagnostic reporting, and remote system management. To truly grasp how advanced drone operations are orchestrated, one must delve into the foundational concepts of terminal interfaces.
The Genesis of TTY: From Mechanical to Digital
The teletypewriter was a electromechanical device used for sending and receiving typed messages over a telegraphic circuit. Imagine a typewriter connected via wires to another typewriter, allowing two individuals to communicate through written text. In the early days of computing, before monitors and keyboards became ubiquitous, TTYs served as the primary interface for interacting with mainframe computers. Operators would literally type commands into the TTY, and the computer’s responses would be printed out. This represented a fundamental shift: a direct, textual communication channel between a human and a machine.
Early Computing Interfaces
In the pre-graphical era, computers were complex beasts requiring meticulous instruction. The TTY provided a tangible, albeit slow, method of control. Users would type specific commands, and the TTY would dutifully transmit them to the computer’s central processing unit. The output, also printed text, served as feedback, indicating the success or failure of an operation, or presenting data. This direct, character-by-character interaction established the groundwork for what we now recognize as the command-line interface (CLI).
The Evolution to Terminals
As computing advanced, the mechanical TTY was replaced by electronic “terminals.” These still provided a text-based interface, but instead of a physical printer, they used a cathode ray tube (CRT) display. This significantly increased the speed of interaction, as output was no longer bound by the mechanical limitations of printing. However, the fundamental principle remained the same: a standardized way to send commands and receive textual information. This is where the “tty” concept truly solidified within the digital realm, becoming synonymous with terminal emulation.
TTY in Modern Computing and Its Relevance to Drones
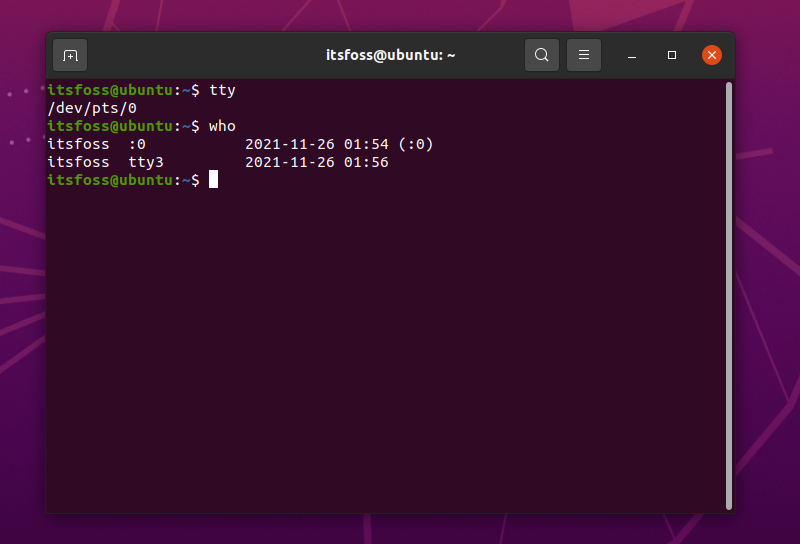
While dedicated physical TTYs are rare today, the concept lives on in the form of terminal emulators found on virtually every operating system. These software applications simulate the behavior of an old-school TTY, allowing users to interact with the system using text-based commands. For drone technology, especially in advanced applications, this underlying principle of direct textual communication and logging is surprisingly pertinent.
Command-Line Interfaces (CLIs) and Drone Control
Modern drones, particularly those used for professional applications like aerial surveying, industrial inspection, and advanced research, often have sophisticated ground control software. While graphical user interfaces (GUIs) are common for basic operations, many advanced configurations, diagnostics, and programming tasks are still best handled through a CLI. This is where the legacy of TTY becomes relevant.

Drone developers and operators might use command-line tools to:
- Configure flight parameters: Adjusting sensor sensitivity, setting specific flight modes, or defining geofence boundaries can sometimes be more efficiently achieved through text commands than navigating complex menus.
- Execute custom scripts: For autonomous missions or repetitive tasks, scripts written in languages like Python can be executed via a CLI, offering unparalleled flexibility.
- Access diagnostic information: When troubleshooting, direct access to system logs and diagnostic outputs via a terminal can provide granular details about the drone’s internal state, sensor readings, and error messages.
System Logging and Telemetry
The “tty” concept also extends to how systems log information. Every action, every sensor reading, every status update can be recorded. In the context of drones, this logging capability is paramount for several reasons:
- Flight Data Recorder (FDR): Similar to aircraft, drones generate extensive logs of flight data. These logs, often accessible through a terminal interface or its underlying system, are critical for post-flight analysis, incident investigation, and performance optimization.
- Telemetry Streams: Real-time telemetry, which includes data on battery voltage, GPS coordinates, altitude, and motor speeds, can be streamed and interpreted via command-line tools. This allows for sophisticated monitoring and automated responses.
- Debugging and Error Reporting: When something goes wrong, detailed logs are invaluable. A TTY-like output stream can provide the raw, unadulterated error messages that help engineers pinpoint the source of a problem.
TTY and Autonomous Flight Systems
The most profound connection between the TTY concept and advanced drone capabilities lies in autonomous flight. True autonomy requires precise control over complex systems, and this control often relies on programmatic instructions and detailed feedback.
Programming Autonomous Missions
Autonomous missions are not just about setting a waypoint; they involve intricate sequences of actions, conditional logic, and sensor-based decision-making. Developers often program these behaviors using scripting languages or dedicated mission planning software that, at their core, interact with the drone’s flight controller through a command-line or API interface that draws from the TTY paradigm. The TTY’s role here is as the conduit for these instructions and the channel for the drone to report its progress, any encountered issues, or its current state.
Sensor Data Interpretation and Decision Making
Modern drones are equipped with an array of sensors, from GPS and IMUs to cameras and lidar. For autonomous systems, this data needs to be processed in real-time to make critical flight decisions. While the raw sensor data might be processed by specialized hardware or software, the commands that direct this processing, and the resulting decisions or status updates, can often be communicated through a text-based interface. This is where the TTY’s historical role in direct, sequential input/output becomes relevant to the intricate dance of autonomous flight. The drone’s “brain” communicates its intentions and observations, and the system interprets them, potentially adjusting the flight path or mission parameters, all traceable back to the fundamental idea of a terminal as an intermediary for control and feedback.

Remote System Management and Diagnostics
For fleets of drones, managing and diagnosing issues remotely is essential. Command-line tools, which are direct descendants of TTY interfaces, are indispensable for this. Administrators can connect to drones (or their ground control stations) remotely via SSH (Secure Shell), a protocol that emulates a TTY session, to:
- Update firmware: Deploying software updates across multiple drones efficiently.
- Run diagnostics: Checking the health of individual components.
- Retrieve logs: Collecting flight data or error logs for analysis without physically retrieving the drone.
- Reconfigure settings: Making on-the-fly adjustments to operational parameters.
The underlying principle of a direct, textual communication channel for command and control, pioneered by the TTY, remains a vital, albeit often unseen, component in the sophisticated operation and maintenance of advanced drone systems. It represents the robust, low-level interface that underpins the complex, often visual, experiences we associate with modern drone technology.