While the phrase “what does the bottom number in blood pressure mean” is universally understood in human physiology, its underlying concept—defining a critical baseline or resting state—holds profound, albeit metaphorical, significance when applied to the complex operational health of advanced flight systems, particularly in modern drones. In the realm of flight technology, this “bottom number” translates into the essential, minimal thresholds and stable parameters that dictate a drone’s systemic integrity, performance, and reliability during its most fundamental operations. It represents the diagnostic indicators of a drone’s “resting pulse,” its inherent stability when not under peak stress, and its foundational capacity to maintain controlled flight. Understanding these baseline metrics is paramount for ensuring safety, optimizing performance, and enabling the sophisticated autonomous capabilities that define contemporary aerial platforms.
The Diastolic Equivalent in Drone Flight Systems: Baseline Stability
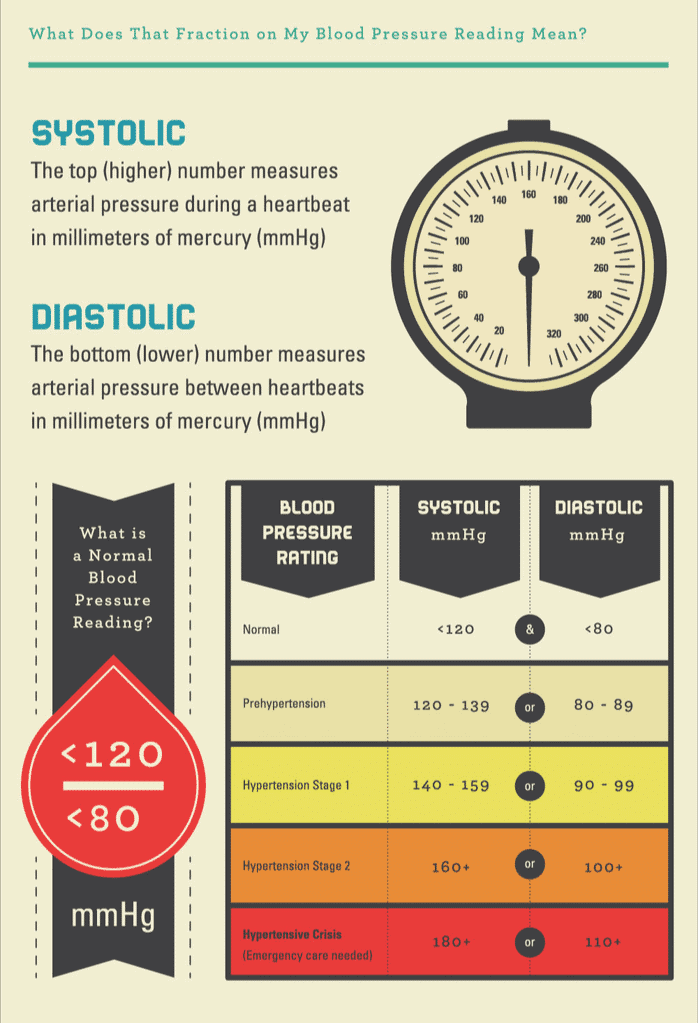
In human health, the “bottom number” or diastolic pressure reflects the pressure in the arteries when the heart rests between beats, signifying a crucial baseline for cardiovascular health. Similarly, in drone flight technology, this concept can be mapped to the minimum stable operating parameters and quiescent states of various subsystems. These aren’t just arbitrary numbers; they are the fundamental conditions that must be consistently maintained for the drone to operate safely and effectively, especially when hovering, holding position, or performing low-stress maneuvers. Just as a healthy diastolic pressure indicates a robust circulatory system at rest, a drone’s “diastolic equivalent” signifies the intrinsic stability and health of its flight controller, navigation systems, and propulsion components. It speaks to the system’s ability to maintain equilibrium with minimal input, reflecting its foundational design integrity and calibration.
Inertial Measurement Units (IMUs) and Sensor Noise
The Inertial Measurement Unit (IMU), comprising accelerometers and gyroscopes, is the cornerstone of a drone’s perception of its own motion and orientation. The “bottom number” for an IMU isn’t a single value but rather a set of baseline characteristics related to its noise floor and bias stability. When a drone is nominally stable, perhaps hovering in still air or resting on the ground, its IMU should report minimal acceleration and rotational rates, with any deviations primarily attributable to sensor noise. This noise floor represents the lowest discernible signal level—the intrinsic interference that the flight controller must constantly filter out. A healthy “bottom number” for IMU noise implies a consistently low and predictable level of random error, indicating robust sensor hardware and effective calibration. If this “bottom number” increases significantly—manifesting as excessive jitter or drift even when the drone is stationary—it signals a potential systemic issue, such as electromagnetic interference, vibration, or sensor degradation, analogous to an elevated resting heart rate. The flight controller’s ability to consistently operate above this minimal noise threshold, extracting accurate motion data, is crucial for stable flight and precise control.
GPS Signal Integrity and Positional Drift
For drones relying on Global Positioning System (GPS) for navigation and waypoint following, the “bottom number” relates to the minimum acceptable level of positional accuracy and the maximum tolerable drift during a resting or stationary state. While a drone is attempting to hold a fixed position, its GPS receiver is continuously calculating its coordinates. Due to atmospheric conditions, satellite geometry, and receiver limitations, there’s always a degree of error. The “bottom number” here encompasses metrics like Horizontal Dilution of Precision (HDOP) or velocity error when the drone is nominally stable. A healthy system exhibits a consistently low HDOP and minimal positional drift, indicating strong satellite lock and accurate data acquisition at its most fundamental level. If the “bottom number” for positional error or drift becomes too high—meaning the drone struggles to maintain its position even when ideal conditions—it points to issues with the GPS receiver, antenna, or environmental interference, undermining its foundational navigation capabilities. Advanced flight controllers continuously monitor these baseline GPS parameters, using them to validate positional data and ensure the reliability of autonomous flight modes.
Sustaining Systemic Health: The Role of Power and Propulsion
Just as blood pressure reflects the force of blood flow, a drone’s “systemic pressure” can be interpreted as the vital energy and mechanical forces that enable flight. Here, the “bottom number” refers to critical minimums within the power and propulsion systems—the baseline requirements for sustained, stable operation. These are the fundamental energy levels and performance thresholds needed for the drone to simply exist in the air, without necessarily performing complex maneuvers. Deviations from these healthy “bottom numbers” can signal imminent failure or significant performance degradation, highlighting the criticality of a robust and well-maintained energy delivery system.
Battery Voltage and Power Delivery at Rest
The battery is the lifeblood of a drone. The “bottom number” in terms of battery health often refers to the lowest safe operating voltage under nominal, low-stress conditions, or the minimum voltage required to sustain a stable hover. While under load, voltage sags are normal, but a healthy “bottom number” implies that even during moments of minimal power draw (e.g., hovering in place, idling motors), the battery maintains a stable voltage within an acceptable range, without excessive ripple or sudden drops. This baseline voltage indicates the overall health and capacity of the battery pack. A consistently high “bottom number” (i.e., stable voltage output) reflects a healthy battery with low internal resistance, capable of delivering consistent power. Conversely, a rapidly declining or unstable “bottom number” at rest points to a worn battery, cell imbalance, or power delivery issues that could lead to sudden power loss during flight. Monitoring this “bottom number” is critical for flight planning and determining the operational lifespan of the battery.
Motor Performance and Efficiency Baselines
Motors and propellers are the muscles of the drone. The “bottom number” for these components relates to their minimum efficient thrust output and the consistency of their RPMs required to counteract gravity and maintain stability during a hover or low-speed flight. Even at its most basic state, a drone’s propulsion system needs to generate a precise amount of thrust to maintain altitude. The “bottom number” here is the minimum consistent performance across all motors, ensuring balanced lift and rotational stability. In a healthy system, all motors should operate at similar low RPMs with minimal vibration and consistent thrust, indicating balanced propellers, healthy bearings, and well-tuned electronic speed controllers (ESCs). If one motor’s “bottom number” (its baseline idle RPM or minimal stable thrust output) deviates significantly—perhaps requiring higher RPMs to generate the same lift, or exhibiting excessive vibration—it signals an imbalance, bearing wear, or an ESC issue. This foundational “diastolic” performance of the propulsion system is crucial for a smooth and controlled flight, preventing unexpected yaw, roll, or pitch deviations.
Autonomy and Resilience: When the System Recovers
The concept of a “bottom number” extends beyond mere static measurements; it becomes a dynamic reference point for autonomous systems and their ability to maintain resilience. A drone’s flight controller constantly monitors these baseline parameters, not just to ensure current stability but also to predict and react to deviations. The “bottom number” conceptually represents the system’s resilience—its inherent ability to maintain fundamental stability and recover from minor disturbances without escalating to a critical state. This underpins the drone’s capacity for adaptive control and reliable autonomous operation.
Control Loop Latency and Responsiveness
The “bottom number” in control loop performance refers to the minimal, unavoidable delay in processing sensor data and sending commands to actuators. Every millisecond counts in a flight controller’s loop. A healthy “diastolic” state implies that this latency remains consistently low and predictable, even when the drone is simply holding position or performing minimal control corrections. This baseline latency is crucial because it defines the fundamental responsiveness of the drone. If the “bottom number” for latency increases—perhaps due to computational overload, software glitches, or communication issues—the drone’s ability to react quickly and precisely to external forces or commanded movements is compromised. Low, stable baseline latency is a hallmark of a robust flight control system, enabling smooth corrections and contributing directly to overall flight stability and safety.
Adaptive Flight Control and Anomaly Detection
Advanced flight controllers often utilize sophisticated algorithms and even machine learning to establish a “normal” “bottom number” baseline for various flight parameters. These systems learn what constitutes healthy IMU noise, stable GPS drift, consistent voltage, and optimal motor performance during quiescent states. Deviations from this learned baseline—a sudden, uncommanded increase in IMU noise, unexplained GPS drift, or unexpected voltage drops at rest—can be flagged as analogous to a “spike” in drone “blood pressure.” Such anomalies trigger diagnostic routines, warnings, or even autonomous safety protocols. The ability of the flight controller to recognize when its “bottom numbers” are trending negatively is a critical aspect of predictive maintenance and enhancing operational safety. It allows the drone to self-assess its foundational health and adapt its behavior or alert its operator before minor issues escalate into critical failures.
The Broader Implications for Operational Integrity
Understanding and actively monitoring the “bottom number” equivalents within drone flight technology is not merely an academic exercise; it has profound, practical implications for operational integrity, safety, and longevity. This metaphorical concept underpins several critical aspects of drone management:
Firstly, it informs pre-flight checks and calibration. Ensuring that all sensors, power systems, and propulsion components exhibit healthy “bottom numbers” before takeoff is fundamental. Consistent deviations during ground checks indicate a drone that is not starting from a healthy “resting state,” potentially leading to instability or failure in the air.
Secondly, it guides software tuning and optimization. Flight controller algorithms are meticulously designed to filter noise and manage inherent system variability. Effective tuning means the software is adept at distinguishing genuine flight dynamics from baseline noise or drift, ensuring that the drone responds to meaningful inputs and maintains stability without overreacting to minor “diastolic” fluctuations.
Finally, it is central to predictive maintenance and fleet management. By continuously logging and analyzing these baseline parameters over time, operators can identify subtle degradations—a gradual increase in IMU noise, a creeping up of motor vibration at idle, or a slow decline in battery resting voltage. These trends, akin to a persistent elevation in human diastolic pressure, are early warning signs that can prompt maintenance interventions before component failure, thereby extending the lifespan of the drone and minimizing unexpected downtime.
In essence, while blood pressure is a measure of human health, the “bottom number” principle, when applied to flight technology, becomes a powerful framework for assessing the fundamental, resting-state health of a drone. It emphasizes the importance of stable baselines, minimal thresholds, and consistent performance across all critical subsystems, ensuring that these complex aerial platforms operate predictably, safely, and efficiently in an ever-demanding operational environment.